Sistema mecánico.
Sistema mecánico.
Sistema mecánico.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Y SISTEMASEleELE<br />
ELEMENTOS DE MÁQUINAS Y SISTEMAS<br />
1
Mecanismos y sistemas mecánicos<br />
Mecanismo<br />
Conjunto de elementos conectados entre sí por medio de<br />
articulaciones móviles cuya misión es:<br />
• transformar una velocidad en otra<br />
• transformar una fuerza en otra<br />
• transformar una trayectoria en otra diferente o<br />
• transformar un tipo de energía en otro<br />
Según el número de elementos, los clasificamos en:<br />
o simples: tiene dos elementos de enlace.<br />
o Complejos: tiene más de dos elementos de enlace.<br />
2
<strong>Sistema</strong> mecánico.<br />
<strong>Sistema</strong> mecánico o máquina es una combinación de mecanismos que transforma<br />
velocidades, trayectorias, fuerzas o energías mediante una serie de<br />
transformaciones intermedias<br />
Movimientos que puede describir un elemento de un mecanismo:<br />
• Movimiento rectilíneo (en un único sentido)<br />
• Movimiento alternativo (movimiento de vaivén)<br />
• Movimiento de circular.<br />
3
Elementos de los mecanismos y los sistemas mecanicos.<br />
1. <strong>Sistema</strong> motriz o de entradas.<br />
Recibe la energía de entrada, la cual será transformada o transmitida.<br />
2. <strong>Sistema</strong> transmisor<br />
Medio que permite modificar la energía o el movimiento proporcionado por el<br />
sistema motriz.<br />
3. <strong>Sistema</strong> receptor o sistema de salida<br />
Realiza el trabajo con la salida que le proporciona el sistema transmisor, y es el<br />
objetivo del sistema mecánico.<br />
4
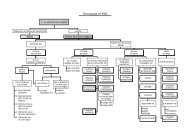
Clasificación de los mecanismos.<br />
a) <strong>Sistema</strong> de transmisión de movimiento.<br />
El sistema motriz y el sistema receptor tienen el mismo movimiento.<br />
Tipos:<br />
o Mecanismos de transmisión lineal: movimiento rectilíneos (poleas, palancas, …)<br />
o Mecanismos de transmisión circular : movimientos de rotación en otra rotación<br />
(transmisión por correas, con cadenas, engranajes, …)<br />
b) <strong>Sistema</strong> de transformación de movimiento.<br />
El sistema motriz y el sistema receptor tienen distinto movimiento.<br />
Tipos:<br />
o Mecanismos que transforman el movimiento circular en rectilíneo<br />
o Mecanismos que transforman movimiento circular en alternativo.<br />
5
MECANISMOS DE TRANSMISION DEL MOVIMIENTO<br />
A. Mecanismos de transmisión lineal.<br />
Movimiento rectilíneo<br />
“transformación”<br />
Movimiento rectilíneo<br />
Aplicación : transformación de fuerzas. La fuerza para realizar una determinada<br />
acción sea menor.<br />
La palanca<br />
Barra rígida que se articula en el punto de apoyo que hace posible que la barra gire.<br />
Cuando está en equilibrio, la expresión que define su comportamiento es la Ley de<br />
la Palanca:<br />
La potencia por su brazo es igual a la resistencia por el suyo<br />
F · b F = R · b R<br />
6
Según la colocación del punto de apoyo:<br />
7
La Polea.<br />
Disco que puede girar alrededor de su eje y que dispone en el borde de una<br />
acanaladura por la que se hace pasar una cuerda, cable o correa.<br />
Función: modificar la fuerza aplicada.<br />
Pueden ser:<br />
• Fijas: si su eje de<br />
rotación permanece fijo.<br />
• Móviles: si su eje de<br />
rotación se puede<br />
desplazar de forma lineal.<br />
8
-Polea fija: los valores de la potencia y la resistencia son iguales.<br />
F F =R M<br />
-Polea móvil: la potencia que es necesario aplicar es igual a la mitad de la<br />
resistencia que se trata vencer.<br />
En el caso general de un mecanismo constituido por n poleas móviles<br />
Además, en este caso, la distancia recorrida por la resistencia es 2n veces menor<br />
que la que recorre la potencia.<br />
9
B. Mecanismos de transmisión circular.<br />
Movimiento rotación<br />
“transformación”<br />
Movimiento rotación<br />
Utilidad: poder aumentar o reducir la velocidad de giro de un eje.<br />
Para esto, las máquinas disponen de partes móviles que transmiten la energía y el<br />
movimiento de las máquinas motrices a otros elementos.<br />
Estas partes móviles son los elementos transmisores, pueden ser directos o indirectos.<br />
Directos:<br />
• Árboles y ejes.<br />
• Ruedas<br />
• Engranajes<br />
• Tornillo sinfin<br />
Indirectos:<br />
• Poleas con correa<br />
• Cadenas<br />
11
Árboles y ejes.<br />
Eje<br />
elemento, normalmente cilíndrico, que gira sobre sí mismo y sirve para<br />
sostener diferentes piezas.<br />
Según su forma de trabajo:<br />
• Ejes fijos: Permiten el giro de los elementos mecánicos<br />
situados sobre ellos, pero no giran solidariamente con ellos.<br />
• Ejes giratorios: pueden girar solidariamente con algunos<br />
de los elementos situados sobre ellos.<br />
12
Árbol elemento de una máquina, cilíndrico o no, sobre el que se montan<br />
distintas piezas mecánicas, a los que se le transmite potencia.<br />
Siempre giran solidariamente con los órganos soportados<br />
Están sometidos a esfuerzos de torsión y flexión.<br />
13
Diferencia entre ejes y árboles<br />
• Los ejes sustentan los órganos giratorios y no transmiten potencia (no están<br />
sometidos a esfuerzos de torsión).<br />
•Los árboles transmiten potencia y están sometidos a esfuerzos de torsión.<br />
Los ejes suelen tener un diámetro menor ya que están sometidos a esfuerzos<br />
menores que los árboles.<br />
14
Ruedas de fricción.<br />
Transmiten movimiento circular entre dos árboles de trasmisión gracias a la fuerza<br />
de rozamiento entre dos ruedas en contacto directo.<br />
Características:<br />
a) Realizados en materiales de alto coeficiente de rozamiento.<br />
b) Se emplean en árboles de transmisión muy cercanos y de potencia a trasmitir<br />
pequeña.<br />
c) Son fáciles de fabricar, no necesitan apenas mantenimiento y no producen<br />
ruidos.<br />
15
Fuerza axial (Fx)<br />
Es la fuerza con la que se deben presionar ambas ruedas.<br />
Donde:<br />
n = nº de revoluciones por minuto (rpm)<br />
r = radio de la rueda conductora (m)<br />
µ =coeficiente de rozamiento (entre 0 y 1)<br />
P = potencia a transmitir (W)<br />
Fx = fuerza axial<br />
La relación de transmisión es la relación de velocidades entre la rueda conducida (o<br />
receptor) y la rueda conductora (o motriz)<br />
16
Clasificación:<br />
• Ruedas de fricción exteriores<br />
De forma cilíndrica.<br />
El contacto se produce entre las superficies exteriores.<br />
Las ruedas giran en sentido inverso una de la otra.<br />
La relación de transmisión:<br />
No existe desplazamiento por lo que v = V<br />
Distancia entre ejes:<br />
17
• Ruedas de fricción interiores<br />
También de forma cilíndrica.<br />
El contacto se produce entre la superficie interior de la rueda mayor y la exterior<br />
de la rueda menor .<br />
Ambas ruedas giran en el mismo sentido.<br />
La relación de transmisión es igual<br />
que en el caso anterior:<br />
Distancia entre ejes:<br />
18
• Ruedas de fricción troncocónicas:<br />
Tienen forma de tronco de cono.<br />
El contacto se produce entre sus superficies<br />
laterales.<br />
Se utilizan cuando los árboles de transmisión no<br />
son paralelos.<br />
Producen la inversión de giro de las ruedas.<br />
La relación de transmisión:<br />
Observamos que:<br />
19
Poleas con correa.<br />
Consiste en dos poleas unidas por una misma correa o cable, y su objetivo es<br />
transmitir el movimiento de eje de una de las poleas a la otra., se utiliza cuando la<br />
distancia entre los ejes de rotación es grande.<br />
Ambas giran solidariamente.<br />
Arrastran a la correa por adherencia entre ambas.<br />
20
El número de revoluciones por minuto (vueltas) de cada eje viene dado por el<br />
tamaño de las poleas:<br />
n (polea mayor) < n (polea menor)<br />
Podemos tener dos casos:<br />
• n 2 < n 1<br />
sistema reductor<br />
• n 2 > n 1<br />
sistema multiplicador<br />
Siendo:<br />
n2 : velocidad de la rueda conducida<br />
n1 : velocidad de la rueda motriz<br />
La relación de transmisión:<br />
D1: diámetro rueda motriz<br />
D2: diámetro rueda conducida<br />
21
Tipos de poleas y correas:<br />
22
Engranajes.<br />
Tren de engranajes es un conjunto de dos o más ruedas dentadas que<br />
tienen en contacto sus dientes de forma que, cuando gira una, giran las<br />
demás.<br />
Son el medio de transmisión de potencia más empleado.<br />
Ventajas:<br />
las ruedas no pueden resbalar una con<br />
respecto a la otra.<br />
transmiten grandes esfuerzos<br />
la relación de transmisión se conserva<br />
siempre constante.<br />
23
Modos de transmisión de movimiento de los engranajes:<br />
Con engranajes se puede trasmitir el movimiento de dos modos, según como se<br />
dispongan los ejes:<br />
Entre ejes paralelos:<br />
• Engranajes entre dientes rectos<br />
• Engranajes entre dientes helicoidales<br />
• Engranajes entre dientes en V<br />
Entre ejes perpendiculares:<br />
• Transmisión entre ejes que se cortan.<br />
• Transmisión entre ejes que se cruzan.<br />
24
Transmisión entre ejes paralelos:<br />
Para la transmisión entre ejes (o árboles) con poca separación, la forma de los<br />
piñones o ruedas dentadas en cilíndrica.<br />
Subtipos:<br />
Dientes rectos<br />
‣Los más sencillos de fabricar.<br />
‣Para transmitir pequeños esfuerzos.<br />
‣Se emplea en maquinarias que utilice ejes cuya<br />
velocidad no es muy elevada, porque es un sistema<br />
ruidoso y causa vibración.<br />
‣Inconveniente: transmite el esfuerzo sólo sobre el<br />
diente que está engranado.<br />
25
Parámetros que caracterizan las ruedas dentadas con dientes rectos:<br />
Diámetro primitivo (dp): es la circunferencia que<br />
tendría una rueda de fricción con la misma relación<br />
de transmisión.<br />
Diámetro exterior (de): circunferencia que limita<br />
exteriormente los dientes.<br />
Diámetro interior (di):circunferencia que limita<br />
interiormente los dientes.<br />
26
Módulo (m): cociente entre el diámetro<br />
primitivo y el número de dientes z de la rueda.<br />
Paso circular (p): arco de la circunferencia<br />
primitiva limitado entre dos flancos homólogos<br />
de dos dientes consecutivos. Se obtiene:<br />
La relación entre el módulo m y el paso p de una rueda vendrá dado por:<br />
27
Relación de transmisión (i): es la misma que para las ruedas de fricción. En<br />
función del número de dientes.<br />
Longitud de la circunferencia primitiva motriz: π ·dp 1 = p Z 1 =2πR 1<br />
Longitud de la circunferencia primitiva conducida : π ·dp 2 = p Z 2 =2πR 2<br />
Características del diente:<br />
28
Valor de los diámetros: (en función de<br />
29
Dientes helicoidales<br />
Varios dientes están engranados a la vez.<br />
• El esfuerzo de flexión se reparte entre los dientes<br />
compartidos durante la transmisión. Menos roturas,<br />
menos ruido<br />
• Inconveniente al estar los dientes inclinados se<br />
produce una fuerza axial (en sentido de los ejes) sobre<br />
de los cojinetes de apoyo del eje.<br />
Dientes en V<br />
Estos engranajes conservan las ventajas anteriores<br />
con un diseño que contrarresta las fuerzas axiales.<br />
30
Transmisión entre ejes perpendiculares:<br />
Transmisión entre ejes que se cortan.<br />
Los engranajes suelen ser:<br />
• De dientes rectos: engranajes cónicos.<br />
• De dientes helicoidales: engranajes cónicos elicoidales.<br />
Ambos tienen las superficies troncocónicas. Esta transmisión permite transferir<br />
esfuerzos , al mismo tiempo, se generan grandes esfuerzos.<br />
31
Transmisión entre ejes que se cruzan.<br />
Tornillo sinfín y rueda cóncava.<br />
Ventaja<br />
Sólo se puede transmitir el movimiento del tornillo a la rueda<br />
cóncava (corona) y nunca al revés, permitiendo utilizar en<br />
aplicaciones en las que una vez que el motor se ha parado, no sea<br />
arrastrado por el propio peso.<br />
Permite la transmisión de esfuerzos muy grandes y a<br />
la vez tiene una relación de transmisión muy baja.<br />
El mecanismo consta de una rueda conducida<br />
dentada, y un tornillo, que es la rueda motriz.<br />
Relación de transmisión<br />
Z = dientes de la rueda conducida<br />
32
Engranajes helicoidales.<br />
Relación de transmisión:<br />
Z1= dientes del engranaje motriz<br />
Z2 = dientes del engranaje conducido<br />
En función del diámetro primitivo de las ruedas:<br />
33
Tren compuesto de engranajes.<br />
Conjunto de dos o más pares de engranajes, que engranan entre sí, de modo que<br />
al menos dos de ellas giran solidarias entre sí.<br />
En el tren de la figura:<br />
• 2 engranajes simples<br />
• Suponemos M como árbol motriz ruedas 1 y 2,<br />
rueda 1 actúa como motriz de 2.<br />
•Árbol I intermedio. Sobre el que se monta la<br />
rueda 2 –conducida-, recibe el movimiento de 1,<br />
y la 3, que actúa de conductora sobre la rueda 4<br />
•R es el árbol resistente. La rueda 4 recibe el<br />
movimiento que transmite la 3.<br />
34
Cadenas cinemáticas<br />
Suelen estar formadas por varios árboles.<br />
Cada árbol se indica con un número romano.<br />
Los engranajes se representan con una Z seguida de un subíndice, para los<br />
engranajes conductores será impar y par para los conducidos.<br />
35
Caja de velocidades<br />
•Además de engranajes fijos, también llevan engranajes que se pueden deslizar.<br />
• Los engranajes están pareados y unidos entre sí.<br />
• Al desengranar con un engranaje, pueden quedar sin engranar o engranado con otro.<br />
36
Relación entre potencia y par.<br />
Además del movimiento de giro del motor, también se trasmite potencia, energía y<br />
par (momento) hasta el último árbol.<br />
37
Rendimiento de máquinas.<br />
Parte de la potencia o energía que se trasmite desde el motor se pierde por:<br />
a) Rozamiento.<br />
•Todo árbol tendrá que estar apoyado en la estructura de la máquina mediante u<br />
cojinete o rodamiento.<br />
• Al girar con un par o momento, estará rozando sobre su base.<br />
• El rozamiento será un par de sentido opuesto:<br />
Fr: fuerza rozamiento = N · μ<br />
Par real (M R ) =M – Fr · R= M -N · μ · R<br />
Potencia teórica (Pt) = M · 2 · π · N/60<br />
Potencia real (P R ) = M R · 2 · π · N/60<br />
Rendimiento:<br />
38
) Diseño de los engranajes.<br />
• La forma de los dientes rectos en los engranajes provoca que la fuerza que ejerce<br />
el piñón sobre la rueda conducida forme un ángulo de 20º (ángulo de presión)<br />
La fuerza a transmitir será:<br />
F 1 = F · cos 20 = 0,94 ·F<br />
• La fuerza F se descompone en F 1 y F 2 , F 2 , provoca un esfuerzo de flexión al árbol<br />
que contiene a la rueda y pérdida de la potencia por rozamiento.<br />
39
c) Deslizamiento<br />
•Se origina en transmisiones correa/polea o ruedas de fricción.<br />
• Provoca pérdidas de potencia y energía.<br />
• Lo evitamos tensando las correas o presionando las ruedas adecuadamente.<br />
40