Î ÎÎΥΤÎΧÎÎÎΠΣΧÎÎÎ Î ÎÎÎÎ ÎΣΤÎÎÎÎÎ¥ Î ÎΤΡΩΠ- Nemertes
Î ÎÎΥΤÎΧÎÎÎΠΣΧÎÎÎ Î ÎÎÎÎ ÎΣΤÎÎÎÎÎ¥ Î ÎΤΡΩΠ- Nemertes
Î ÎÎΥΤÎΧÎÎÎΠΣΧÎÎÎ Î ÎÎÎÎ ÎΣΤÎÎÎÎÎ¥ Î ÎΤΡΩΠ- Nemertes

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
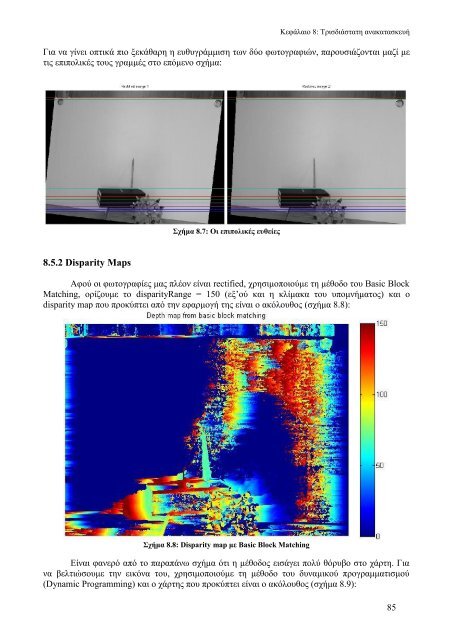
Κεφάλαιο 8: Τρισδιάστατη ανακατασκευή<br />
Για να γίνει οπτικά πιο ξεκάθαρη η ευθυγράμμιση των δύο φωτογραφιών, παρουσιάζονται μαζί με<br />
τις επιπολικές τους γραμμές στο επόμενο σχήμα:<br />
Σχήμα 8.7: Οι επιπολικές ευθείες<br />
8.5.2 Disparity Maps<br />
Αφού οι φωτογραφίες μας πλέον είναι rectified, χρησιμοποιούμε τη μέθοδο του Basic Block<br />
Matching, ορίζουμε το disparityRange = 150 (εξ’ού και η κλίμακα του υπομνήματος) και ο<br />
disparity map που προκύπτει από την εφαρμογή της είναι ο ακόλουθος (σχήμα 8.8):<br />
Σχήμα 8.8: Disparity map με Basic Block Matching<br />
Είναι φανερό από το παραπάνω σχήμα ότι η μέθοδος εισάγει πολύ θόρυβο στο χάρτη. Για<br />
να βελτιώσουμε την εικόνα του, χρησιμοποιούμε τη μέθοδο του δυναμικού προγραμματισμού<br />
(Dynamic Programming) και ο χάρτης που προκύπτει είναι ο ακόλουθος (σχήμα 8.9):<br />
85