AMU analyse automatik - Industriens Uddannelser
AMU analyse automatik - Industriens Uddannelser
AMU analyse automatik - Industriens Uddannelser

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
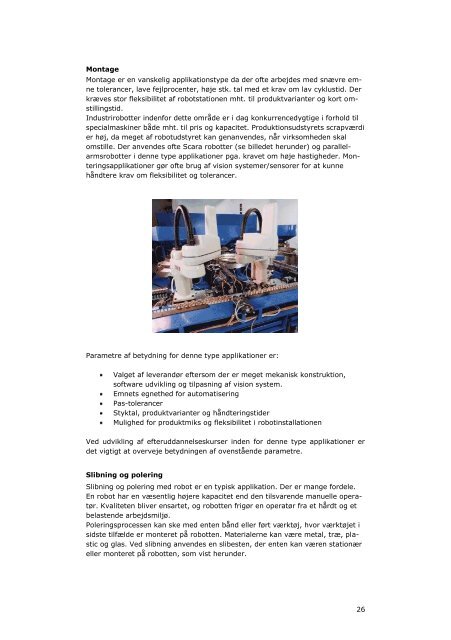
Montage<br />
Montage er en vanskelig applikationstype da der ofte arbejdes med snævre emne<br />
tolerancer, lave fejlprocenter, høje stk. tal med et krav om lav cyklustid. Der<br />
kræves stor fleksibilitet af robotstationen mht. til produktvarianter og kort omstillingstid.<br />
Industrirobotter indenfor dette område er i dag konkurrencedygtige i forhold til<br />
specialmaskiner både mht. til pris og kapacitet. Produktionsudstyrets scrapværdi<br />
er høj, da meget af robotudstyret kan genanvendes, når virksomheden skal<br />
omstille. Der anvendes ofte Scara robotter (se billedet herunder) og parallelarmsrobotter<br />
i denne type applikationer pga. kravet om høje hastigheder. Monteringsapplikationer<br />
gør ofte brug af vision systemer/sensorer for at kunne<br />
håndtere krav om fleksibilitet og tolerancer.<br />
Parametre af betydning for denne type applikationer er:<br />
Valget af leverandør eftersom der er meget mekanisk konstruktion,<br />
software udvikling og tilpasning af vision system.<br />
Emnets egnethed for automatisering<br />
Pas-tolerancer<br />
Styktal, produktvarianter og håndteringstider<br />
Mulighed for produktmiks og fleksibilitet i robotinstallationen<br />
Ved udvikling af efteruddannelseskurser inden for denne type applikationer er<br />
det vigtigt at overveje betydningen af ovenstående parametre.<br />
Slibning og polering<br />
Slibning og polering med robot er en typisk applikation. Der er mange fordele.<br />
En robot har en væsentlig højere kapacitet end den tilsvarende manuelle operatør.<br />
Kvaliteten bliver ensartet, og robotten frigør en operatør fra et hårdt og et<br />
belastende arbejdsmiljø.<br />
Poleringsprocessen kan ske med enten bånd eller ført værktøj, hvor værktøjet i<br />
sidste tilfælde er monteret på robotten. Materialerne kan være metal, træ, plastic<br />
og glas. Ved slibning anvendes en slibesten, der enten kan væren stationær<br />
eller monteret på robotten, som vist herunder.<br />
26