Vorlesung 1
Vorlesung 1
Vorlesung 1

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Digitale Regelung<br />
<strong>Vorlesung</strong>:<br />
Dozent: Professor Ferdinand Svaricek<br />
Ort: Ort: 33/0101<br />
Zeit: Di Di15.00 15.00<br />
– 16.30 Uhr<br />
Uhr<br />
Seminarübungen:<br />
Seminar Seminarübungen: bungen:<br />
Dozent: Alexander Weber<br />
Ort: Ort: 33/0101<br />
Zeit: Mo Mo 9.45 9.45 – 11.15 Uhr Uhr (Beginn: 15.04.2013)<br />
<strong>Vorlesung</strong>sskript:<br />
http://www.unibw.de/lrt15/Institut/lehre/vorlesung/DR_FT2013.pdf<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Motivation<br />
Die reale Welt ist überwiegend berwiegend analog und kontinuierlich.<br />
Die meisten Regler werden aber inzwischen mit Hilfe von<br />
Computern realisiert, die nur zeitdiskrete und<br />
amplitudenquantisierte Signale verarbeiten können. kkönnen.<br />
nnen.<br />
Einfache Realisierung komplexer Regelungs-,<br />
Regelungs Regelungs-, ,<br />
Steuerungs- Steuerungs<br />
Steuerungs-und und<br />
Überwachungsalgorithmen.<br />
berwachungsalgorithmen.<br />
Realisierung in in Software anstatt Hardware ist<br />
kostengünstiger.<br />
kosteng kostengünstiger. nstiger.<br />
Flexibilität Flexibilit Flexibilität t (einfache Anpassung und Änderung nderung der<br />
Algorithmen).<br />
Kürzere rzere Entwicklungszeiten (Rapid Prototyping).<br />
Prototyping<br />
Prototyping). ).<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Einordnung<br />
Die <strong>Vorlesung</strong> Digitale Regelung befaßt befa befaßt t sich mit<br />
den Grundlagen der Regelung zeitabgetasteter<br />
Systeme (Synonyme: zeitdiskrete Regelung oder<br />
Abtastregelung).<br />
Abtastregelung<br />
Abtastregelung). ).<br />
Die digitale Regelungstechnik befaßt befa befaßt t sich mit der<br />
Analyse und der Synthese zeitdiskreter<br />
Regelkreise.<br />
Sowohl in in modernen Kraftfahrzeugen als auch in<br />
in<br />
modernen Flugzeugen werden Steuerungen und<br />
Regelungen heutzutage überwiegend berwiegend digital<br />
realisiert.<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Steuer- Steuer Steuer-und und<br />
Regelungstechnik<br />
Voraussetzungen<br />
Gewichts- Gewichts Gewichts-und und<br />
Übergangsfunktion<br />
Übergangsfunktion,<br />
bergangsfunktion, ,<br />
Übertragungsfunktion<br />
Übertragungsfunktion, bertragungsfunktion, , Pole und Nullstellen, Nullstellen Nullstellen, ,<br />
Stabilität, Stabilit Stabilität, , PT 1, ,<br />
1 , PT 2 ,…,<br />
2 ,…, , Zustandsraummodelle,…<br />
Zustandsraummodelle<br />
Zustandsraummodelle,…<br />
Grundlagen der Messtechnik<br />
Analog-/Digital<br />
Analog Analog-/Digital-Umsetzer<br />
/Digital-Umsetzer Umsetzer<br />
Fourier-Transformation<br />
Fourier Fourier-Transformation<br />
Transformation<br />
Spektralanalyse<br />
Mathematik<br />
Komplexe Zahlen<br />
Laplace-Transformation<br />
Laplace Laplace-Transformation<br />
Transformation<br />
Matrizenrechnung<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Diskrete Signale und Systeme<br />
Signalarten,<br />
Signalarten Signalarten, , Quantisierung,<br />
Quantisierung<br />
Quantisierung, , Periodische<br />
Signalabtastung,<br />
Signalabtastung<br />
Signalabtastung, , Halteglieder,<br />
Halteglieder<br />
Halteglieder, , Impulsfolge,<br />
Impulsfolge Impulsfolge, ,<br />
Sprungfolge<br />
Lerninhalte<br />
Beschreibung von dynamischen Systemen im<br />
Zeitbereich durch Differenzengleichungen<br />
Spektrum diskreter Signale<br />
Abtasttheorem<br />
Frequenzfaltung, Frequenzfaltung<br />
Frequenzfaltung, , Aliasing<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Lerninhalte (2)<br />
Beschreibung von dynamischen Systemen im<br />
Frequenzbereich durch die z-Transformation<br />
zz-Transformation<br />
Transformation<br />
Vergleich mit dem s-Bereich<br />
Bereich<br />
z-Übertragungsfunktion<br />
bertragungsfunktion<br />
Pole und Nullstellen<br />
Zeitdiskrete Zustandsraumdarstellung<br />
Stabilität Stabilit Stabilitätzeitdiskreter zeitdiskreter<br />
Systeme<br />
w-Transformation<br />
Transformation<br />
Entwurf digitaler Regler<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Historischer Hintergrund<br />
Die Entwicklung der digitalen Signalverarbeitung und<br />
der Regelungstechnik ist eng mit der technischen<br />
Entwicklung der Digitalrechner verknüpft. verkn verknüpft. pft.<br />
1954 Hughes Aircraft Company setzt erstmals einen<br />
Digitalrechner zur Überwachung berwachung eines Autopiloten ein.<br />
1958 Louisiana Power & Light Company setzt erstmals einen<br />
Digitalrechner zur Überwachung berwachung eines Kraftwerks ein.<br />
1959 Imperial Chemical Industries (ICI) erprobt digitale<br />
Regelung (Direct ( (Direct Direct Digital Control) Control Control) ) bei der Produktion von<br />
Sodaasche.<br />
1965 Etwa 1000 Digitalrechner sind im im industriellen Einsatz.<br />
Digital Equipment Corporation (DEC) bringt den<br />
Minicomputer PDP-8 PDP PDP-8 8 (Kosten $18000) auf den Markt.<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Kontinuierlicher Regelkreis<br />
Regelkreis mit Digitalrechner als Regler<br />
Einführung Einf hrung<br />
Abtastregelung bzw. zeit-<br />
diskretes Regelungssystem<br />
Im Im Regelkreis sind Elemente<br />
enthalten, die die Signale nur zu<br />
zu<br />
diskreten Zeitpunkten über<br />
ber-<br />
tragen.<br />
Unterscheidung:<br />
Analoge Signale<br />
Digitale Signale<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Definition: Kontinuierliches analoges Signal<br />
Ein kontinuierliches analoges<br />
Signal kann jeden beliebigen<br />
Wert auf der Amplituden- bzw.<br />
Zeitachse annehmen.<br />
Beschreibung von Signalen<br />
Definition: Kontinuierliches quantisiertes Signal<br />
Ein kontinuierliches quanti-<br />
siertes Signal kann jeden<br />
beliebigen Wert auf der<br />
Zeitachse, Zeitachse Zeitachse, , aber nur bestimmte<br />
Amplitudenwerte annehmen.<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Quantisierung<br />
Bei der gleichförmigen Quantisierung wird der<br />
Quantisierungsbereich in 2w Bei der gleichförmigen<br />
gleichf rmigen Quantisierung wird der<br />
Quantisierungsbereich in 2 gleichgroße Intervalle<br />
aufgeteilt. Hierbei ist w die Anzahl der zur Verfügung<br />
stehenden Bits, man spricht hier auch von der<br />
Wortlänge.<br />
w gleichgroße gleichgro e Intervalle<br />
aufgeteilt. Hierbei ist w die Anzahl der zur Verfügung<br />
Verf gung<br />
stehenden Bits, man spricht hier auch von der<br />
Wortlänge.<br />
Wortl nge.<br />
Beispiel:<br />
Quantisierungsbereich: Quantisierungsbereich<br />
Quantisierungsbereich: 0 – 10 Volt<br />
Wortlänge: Wortl nge: 3 bit<br />
<br />
Anzahl der Intervalle: 2 3 = 8<br />
Intervallbreite: 10/8 = 1,25 Volt<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung<br />
2 2<br />
0<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
1<br />
2 1<br />
0<br />
0<br />
1<br />
1<br />
0<br />
0<br />
1<br />
1<br />
2 0<br />
0<br />
1<br />
0<br />
1<br />
0<br />
1<br />
0<br />
1<br />
0<br />
1,25<br />
2,5<br />
3,75<br />
5<br />
6,25<br />
7,5<br />
8,75
Definition: Zeitdiskretes Signal<br />
Ein zeitdiskretes Signal kann<br />
nur zu bestimmten Zeitpunkten<br />
einen beliebigen Wert auf der<br />
Amplitudenachse annehmen.<br />
Definition: Digitales Signal<br />
Ein digitales Signal kann zu zu<br />
bestimmten Zeitpunkten nur<br />
einen quantisierten Amplitudenwert<br />
annehmen.<br />
Beschreibung von Signalen (2)<br />
t 0 t 1 t 2 t 3<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung<br />
6,25<br />
5,0<br />
3,75<br />
2,5<br />
1,25
Definition: Stochastisches Signal<br />
Ein stochastisches Signal hängt ngt in seinem<br />
zeitlichen Verlauf vom Zufall ab.<br />
Signalwert<br />
Beschreibung von Signalen (4)<br />
Zeit<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Analog-Digital<br />
Analog Digital-Umsetzer Umsetzer<br />
In In einem A/D–Umsetzer A/D A/D–Umsetzer Umsetzer wird ein kontinuierliches<br />
Signal zeitdiskretisiert und amplitudenquantisiert.<br />
amplitudenquantisiert<br />
amplitudenquantisiert.<br />
Der Effekt der Amplitudenquantisierung ist bei<br />
hinreichend großer gro großer er Auflösung Aufl Auflösung sung für ffür<br />
r die Dynamik des<br />
Regelkreises vernachlässigbar.<br />
vernachl vernachlässigbar. ssigbar.<br />
Im weiteren wird äquidistante<br />
quidistante Abtastung<br />
vorausgesetzt.<br />
Die Tastperiode T ist aber ein wesentlicher<br />
Analyse- Analyse Analyse-und und Syntheseparameter, der erheblichen<br />
Einfluß Einflu Einflußauf auf die Dynamik des Regelkreises hat.<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Beschreibung von Systemen<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Beschreibung von Systemen (2)<br />
Regelstrecke<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Beschreibung von Systemen (3)<br />
Regler<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Schreibweise diskreter Signale<br />
Durch Abtastung des kontinuierlichen Signals y(t) zu den<br />
Zeitpunkten t1, t2, t3,... erhält man das zeitdiskrete Signal<br />
oder die Abtastfolge y(tk ) = y(t)| t=tk .<br />
Durch Abtastung des kontinuierlichen Signals y(t) zu den<br />
Zeitpunkten t1, , t 2, , t 3,... ,... erhält erh lt man das zeitdiskrete Signal<br />
oder die Abtastfolge y(t k) ) = y(t)| t=tk t=t .<br />
Beispiel:<br />
y(0,5), y(0,7), y(0,8), .....<br />
Wird eine äquidistante<br />
quidistante Abtastung mit dem Abtastintervall<br />
T vorgenommen, so so kann man auch diese abgekürzte<br />
abgek abgekürzte rzte<br />
Schreibweise verwenden:<br />
Beispiel:<br />
y k = k = y(k) = y(kT) = y(t)| t=kT .<br />
t=kT.<br />
Für r T=0,1 bedeutet dies<br />
y(3) = y(3T) = y(0,3)<br />
Die Bezeichung y k kann k kann dabei sowohl für ffür<br />
r einen einzelnen<br />
Abtastwert als auch für ffür<br />
r eine ganze Abtastfolge stehen.<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
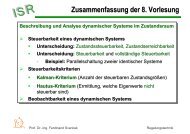
Elementare diskrete Signale<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Eigenschaften diskreter Systeme<br />
Betrachtet werden lineare, zeitinvariante, kausale Systeme<br />
Beispiel:<br />
y1(k) (k) + y 2(k) (k) = f(u 1(k)) (k)) + f(u 2(k)) (k))<br />
= f(u 1(k) (k) + u 2(k)) (k))<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Zeitinvarianz<br />
Eigenschaften diskreter Systeme (2)<br />
Ein zeitdiskretes System verhält verh verhält lt sich zeitinvariant,<br />
zeitinvariant<br />
zeitinvariant, ,<br />
wenn ein zeitverschobenes Eingangssignal u(k --k k 0 )<br />
0 ) das<br />
zeitverschobene Ausgangssignal y(k --k k 0 )<br />
0 ) erzeugt.<br />
u(k)<br />
u(k)<br />
k 0<br />
k<br />
k<br />
Zeitinvariantes<br />
Systemverhalten<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung<br />
y(k)<br />
y(k)<br />
k 0<br />
k<br />
k
Eigenschaften diskreter Systeme (3)<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Eigenschaften diskreter Systeme (7)<br />
Differenzengleichung eines zeitdiskreten Systems<br />
Differenzengleichungen stellen einen Rekursionsalgorithmus<br />
dar, der mit einem Digitalrechner schrittweise gelöst gel gelöst st werden<br />
kann.<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung
Eigenschaften diskreter Systeme (8)<br />
% Sprungantwort für die Differenzengleichung 1. Ordnung<br />
% y(k) = -a1 * y(k-1) + b0 * u(k)<br />
% als Approximation der DGL<br />
% T1 * dy(t)/dt + y(t) = u(t)<br />
%<br />
T1 = 1;<br />
T = 0.1;<br />
a1 = -T1/(T1+T)<br />
b0 = T/(T1+T)<br />
%<br />
uk = 1;<br />
%<br />
% Anfangsbedingung y(0) = 0<br />
%<br />
y0 = 0;<br />
%<br />
% Berechnung der Ausgangsfolge für k = 1,2,3,4..<br />
%<br />
y(1) = -a1 * y0 + b0 *uk;<br />
for i=2:100<br />
y(i) = -a1 * y(i-1) + b0 * uk;<br />
end<br />
%<br />
% Graphische Darstellung der Ausgangsfolge T1 %<br />
stem(y(1:50))<br />
xlabel('k')<br />
ylabel('y(k)')<br />
title(['Zeitkonstante T1 = ', num2str(T1),' Abtastintervall T = ' num2str(T)])<br />
Prof. Dr.-Ing. Ferdinand Svaricek Digitale Regelung