Gew ¨ohnliche Differentialgleichungen und Dynamische Systeme
Gew ¨ohnliche Differentialgleichungen und Dynamische Systeme
Gew ¨ohnliche Differentialgleichungen und Dynamische Systeme

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Gew</strong>öhnliche <strong>Differentialgleichungen</strong><br />
<strong>und</strong> <strong>Dynamische</strong> <strong>Systeme</strong><br />
<strong>Dynamische</strong> <strong>Systeme</strong><br />
Vorlesung<br />
Reiner Lauterbach<br />
Universität Hamburg, SS 2009
Inhaltsverzeichnis<br />
Einleitung 4<br />
1 <strong>Dynamische</strong> <strong>Systeme</strong> – Gr<strong>und</strong>legendes 9<br />
1.1 Einführende Beispiele . . . . . . . . . . . . . . . . . . . . . . 9<br />
1.1.1 Das Collatz-Problem . . . . . . . . . . . . . . . . . . . 10<br />
1.1.2 Wachstum <strong>und</strong> Zerfall . . . . . . . . . . . . . . . . . . 11<br />
1.1.3 Diskrete Dynamik mit kontinuierlichen Zustandsraum 14<br />
1.1.4 Das Pendel . . . . . . . . . . . . . . . . . . . . . . . . . 15<br />
1.1.5 Wortspiele . . . . . . . . . . . . . . . . . . . . . . . . . 16<br />
1.2 Gr<strong>und</strong>legende Begriffe . . . . . . . . . . . . . . . . . . . . . . 18<br />
1.2.1 Metrische Räume . . . . . . . . . . . . . . . . . . . . . 18<br />
1.2.2 Vollständige metrische Räume . . . . . . . . . . . . . 19<br />
1.2.3 Eingebettete Mannigfaltigkeiten . . . . . . . . . . . . 23<br />
1.2.4 Halbgruppen von Selbstabbildungen . . . . . . . . . 27<br />
1.2.5 Diskrete Dynamik von Selbstabbildungen . . . . . . . 29<br />
1.3 Geometrische Begriffe . . . . . . . . . . . . . . . . . . . . . . 29<br />
1.3.1 Spezielle Orbits <strong>und</strong> ihre Grenzmengen . . . . . . . . 29<br />
1.3.2 Stabilität . . . . . . . . . . . . . . . . . . . . . . . . . . 34<br />
1.4 Diskrete versus kontinuierliche Dynamik . . . . . . . . . . . 35<br />
1.4.1 Zeit–1–Abbildungen . . . . . . . . . . . . . . . . . . . 35<br />
1.4.2 Poincaré–Abbildungen . . . . . . . . . . . . . . . . . . 36<br />
1.4.3 Suspensionen . . . . . . . . . . . . . . . . . . . . . . . 37<br />
1.5 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38<br />
2 Stabilität 41<br />
2.1 Lineare <strong>Systeme</strong> . . . . . . . . . . . . . . . . . . . . . . . . . . 41<br />
2.2 Lineare ebene <strong>Systeme</strong> . . . . . . . . . . . . . . . . . . . . . . 43<br />
2.2.1 |λ 1,2 | < 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 44<br />
3
4 INHALTSVERZEICHNIS<br />
2.2.2 Ein Eigenwert vom Betrag höchstens 1, mindestens<br />
ein Eigenwert von Betrag 1 . . . . . . . . . . . . . . . 45<br />
2.3 Stabilität von Ruhelagen . . . . . . . . . . . . . . . . . . . . . 45<br />
2.4 Lineare <strong>Differentialgleichungen</strong> <strong>und</strong> Stabilität . . . . . . . . 47<br />
2.4.1 Jordan Form . . . . . . . . . . . . . . . . . . . . . . . . 47<br />
2.4.2 Die Matrixexponentialfunktion . . . . . . . . . . . . . 50<br />
2.4.3 Ebene lineare <strong>Systeme</strong> . . . . . . . . . . . . . . . . . . 54<br />
2.5 Newtons Methode als dynamisches System . . . . . . . . . . 59<br />
3 Klassifikation dynamischer <strong>Systeme</strong> 61<br />
3.1 Konjugation <strong>und</strong> Orbit-Äquivalenz . . . . . . . . . . . . . . . 61<br />
3.2 Hufeisen <strong>und</strong> Büroklammer . . . . . . . . . . . . . . . . . . . 64<br />
3.3 Symbolische Dynamik . . . . . . . . . . . . . . . . . . . . . . 69<br />
4 Fraktale <strong>und</strong> Dimension 79<br />
4.1 Selbstähnlichkeit . . . . . . . . . . . . . . . . . . . . . . . . . 79<br />
4.2 Selbstähnlichkeitsdimension . . . . . . . . . . . . . . . . . . . 87<br />
4.3 Hausdorff-Dimension . . . . . . . . . . . . . . . . . . . . . . 89<br />
4.4 Box-Dimension . . . . . . . . . . . . . . . . . . . . . . . . . . 90<br />
Literaturverzeichnis 93<br />
Index 93
Einleitung<br />
In dieser Vorlesung wollen wir uns dem Studium gewöhnlicher <strong>Differentialgleichungen</strong><br />
widmen, dabei werden wir dies aus der Perspektive der<br />
Theorie dynamischer <strong>Systeme</strong> tun. Dieser Zugang ist relativ neu, hat sich<br />
aber weitgehend durchgesetzt. Er ist dabei so erfolgreich, dass sich diese<br />
Perspektive auch fur das Studium vieler weiterer Gleichungstypen durchgesetzt<br />
hat. Dabei sind dynamische <strong>Systeme</strong> allgemein <strong>Systeme</strong>, die eine<br />
zeitliche Evolution beschreiben, wir werden gleich Beispiele betrachten.<br />
Anwendungen gibt es reichlich, dies sogar aus praktisch allen Wissenschaften.<br />
Methoden sind ebenfalls weitgefächert, wir können Methoden<br />
aus dem Bereich der Analysis verwenden, aber auch die lineare Algebra<br />
wird eine Rolle spielen. oft kann man sich mit numerischen Verfahren<br />
einen raschen Überblick über das Verhalten in einem dynamischen<br />
System verschaffen. Methoden der Zahlentheorie spielen in dem Gebiet<br />
ebenso eine Rolle wie Stochastik <strong>und</strong> Topologie. Keine Angst, wir wollen<br />
uns nur mit der Einführung in das Gebiet befassen, dazu gehört, dass wir<br />
uns gr<strong>und</strong>legende Fragestellungen ansehen, einige wichtige Begriffe <strong>und</strong><br />
Methoden kennenlernen, aber auch beispielhaft sehen wir die Methoden<br />
aus anderen Bereichen das Studium dynamischer Syteme fördern können.<br />
Gr<strong>und</strong>sätzlich stellt man in der Theorie dynamischer <strong>Systeme</strong> Fragen,<br />
die einen sehr langen Zeithorizont betreffen: gibt es ein Gleichgewicht,<br />
gibt es periodische Orbits, sind diese global asymptotisch stabil, können<br />
wir einen globalen Attraktor angeben, welche Dimension hat dieser, können<br />
wir zeitliche <strong>und</strong> räumliche Mittelwerte angeben, gibt es dazwischen Zusammenhänge.<br />
Im ersten Semester werden wir natürlich nur einige wenige<br />
dieser Punkte behandeln. Aufbauend auf diese Vorlesung wird es eine<br />
Fortsetzung (von Herrn Gunesch) geben, die weiterführende Aspekte behandelt.<br />
Literatur zu den in der Vorlesung behandelten Themen gibt es reich-<br />
5
6 INHALTSVERZEICHNIS<br />
haltig, hier ist eine unvollständige Auswahl, die Werke dieser Liste haben<br />
auch in der einen oder anderen Weise, die Auswahl <strong>und</strong> Behandlung der<br />
hier vorgestellten Themen beeinflusst.<br />
• Abraham & Robbin [2] geben eine moderne auch unendlich dimensionale<br />
Darstellung der Theorie. Für die im Werk behandelten Themen<br />
eine hervorragende Einführung, zum Selbststudium vielleicht<br />
etwas abstrakt mit wenig Beispielen.<br />
• Amann [3] gibt eine moderne, sehr vollständige Darstellung der Theorie<br />
gewöhnliche r<strong>Differentialgleichungen</strong>. Wir können nur einen Bruchteil<br />
des Materials bearbeiten. Das Werk eigente sich auch gut für weierführende<br />
Studien.<br />
• Arnol ´d [4] gibt eine knappe Darstellung der wesentlichen Aspekte<br />
einer modernen Theorie von gewöhnlichen <strong>Differentialgleichungen</strong>.<br />
• Denker [6]<br />
• Devaney [7]<br />
• Gunesch [9]<br />
• Gunesch [10]<br />
• Hale [11] ist der Klassiker der englich sprachigen Literatur. Jack Hale<br />
hat mit diesem <strong>und</strong> vielen anderen Werken, die Gr<strong>und</strong>lagen für den<br />
von uns verfolgten Zugang gelegt.<br />
• Hartman [12] hat ein umfangreiches <strong>und</strong> heute klassiches Werk verfasst,<br />
viele Themen findet man nur hier. Als Werk zum Lernen weniger<br />
geeignet, sehr gutes <strong>und</strong> umfangreiches nachschlagewerk zu<br />
den behandelten Themen. Moderne Themen fehlen teilweise.<br />
• Hasselblatt & Katok [13]<br />
• Harro Heuser [14] hat hiermit auch einen deutschen Klassiker vorgelegt.<br />
Eine sehr umfangreiche Themenauswahl <strong>und</strong> viele Geschichten<br />
r<strong>und</strong> um das Thema <strong>Differentialgleichungen</strong> machen es zu einer<br />
F<strong>und</strong>grube, zum Lernen <strong>und</strong> als Begleitlektüre eher nicht geeignet.<br />
Es ist mehr ein Ergänzungsbuch, das aber auch Begeisterung für das<br />
fach verrät <strong>und</strong> wecken kann.
INHALTSVERZEICHNIS 7<br />
• Katok & Hasselblatt [15]<br />
• Lauterbach [17] wurde von mir Als Skript zur Vorlesung <strong>Gew</strong>öhnliche<br />
<strong>Differentialgleichungen</strong> verfasst, liegt auch der jetzigen Vorlesung<br />
teilweise zu Gr<strong>und</strong>e.<br />
• Palis & de Melo [18] haben hiermit eine hervoragende Einführung<br />
in wichtige Aspekte dynamischer <strong>Systeme</strong> <strong>und</strong> ihrer Anwendungen<br />
auf gewöhnliche <strong>Differentialgleichungen</strong> geschrieben. Für die Themen<br />
der engen Themenauswahl ist es auch zum Selbststudium sehr<br />
gut geeignet, als einzige lektüre zum Thema ist es wohl etwas eng.<br />
• Knobloch & Kappel [16] war lange Zeit ein deutsches gr<strong>und</strong>legendes<br />
Werk, ist inzwischen etwas in die Jahre gekommen.<br />
• Wolfgang Walter [19] hat mit diesem Werk einen vielzitierten deutschen<br />
Klassiker verfasst. Viele Ideen aus der Funktionalanalysis <strong>und</strong><br />
Anwendungen auf Randwertprobleme sind hier enthalten. der geometrische<br />
Zugang zu Anfangswertproblemen <strong>und</strong> dynamisches Verhalten<br />
kommt zu kurz. Als das Buch geschrieben wurde, war dieser<br />
Zugang auch noch nicht entwickelt.<br />
Für die historischen Anmerkungen wurden folgende Quellen genutzt:<br />
1. Die Internetseite von St. Andrews College:<br />
http://www-gap.dcs.st-and.ac.uk/ history/Indexes/HistoryTopics.html<br />
2. Die Brockhaus Enzyklopädie [1]<br />
3. Lexikon bedeutender Mathematiker [8]
8 INHALTSVERZEICHNIS
Kapitel 1<br />
<strong>Dynamische</strong> <strong>Systeme</strong> –<br />
Gr<strong>und</strong>legendes<br />
Wir wollen das Studium dynamischer <strong>Systeme</strong> durch eine kleine Zahl von<br />
Beispielen motivieren, Ziel soll sein, eine Fülle möglicher Anwendungen<br />
zu sehen. dabei werden wir genauso auf unbekanntes Terrain vorstoßen,<br />
wie auch erkennen, wie man mit einfachen Methoden Aussagen gewinnen<br />
kann, die wir später verfeinern werden.<br />
1.1 Einführende Beispiele<br />
In diesem kurzen Abschnitt wollen wir einige motivierende Beispiele betrachten,<br />
die vielleicht auf den ersten Blick auch etwas ungewöhnlich sind.<br />
Kurz gesagt, besteht ein dynamisches System aus einer einem Zustandsraum,<br />
an den wir bei der präzisen Definition gewisse Forderungen stellen,<br />
z.B. soll der Begriff, dass zwei Zustände nahe beieinander sind, sinnvoll<br />
sein <strong>und</strong> aus einer Vorschrift, wie aus einem Zustand sich zukünftige<br />
Zustände entwickeln. Wesentlich soll dabei sein, dass allein der Zustand<br />
(<strong>und</strong> vielleicht die Anfangszeit) die zukünftige Entwicklung determinieren.<br />
An dieser Stelle, wollen wir zumindest im Moment keine zufälligen<br />
Einflüsse zualssen, obwohl man an anderer Stelle auch lernen kann, wie<br />
man zufällige Einflüsse behandelt. Für manche Anwendungen in der Physik<br />
sind diese zufälligen Einflüsse sehr wichtig, sie führen trotzdem weit<br />
über den uns gesteckten Rahmen hinaus.<br />
9
10 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
1.1.1 Das Collatz-Problem<br />
Nach Lothar Collatz 1 ist das ist das folgende Problem benannt, obwohl<br />
man es auch unter anderen Bezeichnungen findet. Die Lösung ist offen,<br />
jede(r) der die Lösung findet, wird wohl sofort sehr bekannt werden.<br />
Der Zustandsraum ist die Menge der natürlichen ZahlenÆ, die Zeit<br />
wird hier auch als diskrete Zeit mit der Menge der natürlichen Zahlen<br />
modelliert. Ein Folge natürlicher Zahlen<br />
{a n } n∈Æ<br />
gibt dann die Evolution des Zustandes a 1 an. Jedes Bildungsgesetz für<br />
eine Folge würde nun ein diskretes dynamisches System definieren, für<br />
das Collatz Problem betrachten wir das Gesetz<br />
a n+1 = Ψ(a n ),<br />
wobei Ψ durch<br />
Ψ :Æ→Æ:n↦→<br />
{<br />
2n + 1<br />
if n is odd,<br />
n<br />
if n is even.<br />
2<br />
Wir betrachten einige spezielle Anfangswerte: beginnen wir mit 1, so erhalten<br />
wir die periodische Folge<br />
1, 4, 2, 1, 4, 2, 1, . . .<br />
mit Periode 3, d.h. a n+3 = a n . Wenn wir mit einem beliebigen Wert aus<br />
der Folge starten, erhalten wir bis auf eine Verschiebung die gleiche Folge<br />
zurück:<br />
4, 2, 1, 4, 2, 1, · · · = sh − (1, 4, 2, 1, . . .).<br />
Dabei ist sh − der Verschiebeoperator (nach links) auf dem Raum c aller<br />
reeller Folgen, der sich in natürlicher Weise auch auf alle Unterräume von<br />
c überträgt (<strong>und</strong> natürlich auch auf dem Raum der beidseitigen Folgen definiert<br />
ist <strong>und</strong> Anlass zu interessanten dynamischen Verhalten ist). Starten<br />
wir mit einem anderen Wert, z.B. 7, so erhalten wir die Folge<br />
7, 22, 11, 34, 17, 52, 26, 13, 40, 20,10,5, 16,8, 4, 2, 1, 4, 2, 1<br />
1 Lothar Collatz (6.7.1910-26.9.1990) war ein weltweit bekannter angewandter Mathematiker,<br />
der vor allem die Entwicklung der angewandten Mathematik in Hamburg sehr<br />
bestimmt hat. Er hat in vielen Bereichen der angewandten Mathematik gearbeitet.
1.1. EINFÜHRENDE BEISPIELE 11<br />
<strong>und</strong> so bis auf eine Verschiebung die ursprüngliche periodische Folge, also<br />
(sh − ) 16 (7, 22, 11, 34, 17, 52, 26, 13, 40,20, 10, 5,16, 8, 4,2, 1,4, 2,1, . ..) = (1, 4, 2, 1, . . .).<br />
Das Collatz-Problem besteht nun darin zu beweisen, dass es zu jedem<br />
Startwert n eine Verschiebung (sh − ) j gibt, so dass<br />
sh j (n, Ψ(n), Ψ 2 (n), . . .) = (1, 4, 2, 1, 4, 2, 1, . . .).<br />
Man kann leicht ein Computer-Programm schreiben, dass die Korrektheit<br />
dieser Behauptung für n < 10 p nachprüft, aktuelle Werte von p findet man<br />
in der Literatur, weiteres zum Collatz-Problem findet man z.B. bei Wirsching<br />
[].<br />
1.1.2 Wachstum <strong>und</strong> Zerfall<br />
Wir betrachten eine Population, der Zustand sei die momentane Anzahl<br />
der Individuen der Population. Wir nehmen an, dass die Population sich<br />
in einer festen Generationenfolge entwickelt, d.h. wir können die Beschreibung<br />
reduzieren auf die Anzahl der Individuen in der n-ten Generation.<br />
Die einfachste Annahme zur Beschreibung einer Population ist, dass<br />
Geburten <strong>und</strong> Todesfälle proportional zum gegenwärtigen Zustand sind.<br />
Dann gibt es eine Zahl b > 0, die sogenannte Geburtsrate <strong>und</strong> ein Zahl<br />
1 > d > 0, die Sterberate, so dass sich die Anzahl der Individuen a n+1 in<br />
der n+1-Generation, sich aus der der n-ten Generation a n errechnet durch<br />
a n+1 = (1 + b − d)a n .<br />
Nun ist es sehr einfach, das Verhalten zu diskutieren. Ist a 0 der Ausgangszustand,<br />
β = 1 + b − d, so ergibt sich<br />
a n = β n a 0 .<br />
Der Zustandsraum einer solchen BevölkerungÆ0. Dies ist vielleicht unnatürlich,<br />
weil die Angabe einer reellen Wachstumsrate β /∈Éaus dem<br />
Zustandsraum herausführt. Eine Möglichkeit diese Problematik zu umgehen<br />
besteht darin mit Populationsdichten zu arbeiten, diese sind in natürlicher<br />
Weise reelle Zahlen.<br />
Auch wenn es keine natürliche Zahl geben muss mit<br />
β n = 2
12 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
können wir doch feststellen, dass nach circa ln 2 Zeiteinheiten eine Verdoppelung<br />
der Population eingetreten ist. Entsprechendes findet man bei<br />
ln β<br />
radioaktiven Zerfall als Halbwertszeit. Hier gibt es allerdings keine strenge<br />
Generationenfolge“, so dass es günstiger ist mit einem zeitlich kontinuierlichen<br />
System zu<br />
”<br />
arbeiten.<br />
Der radioaktive Zerfall<br />
Beim radioaktiven Zerfall betrachtet man folgenden Vorgang. Man hat<br />
zum Zeitpunkt 0 eine gewisse Masse u 0 einer radioaktiven Substanz. Mit<br />
u(t) bezeichnen wir die zum Zeitpunkt t verbleibenden Masse der Substanz.<br />
Durch Beobachtungen erhält man, dass die Anzahl der Zerfälle proportional<br />
zur Menge der Substanz ist. Sei α diese Rate. Dann lautet die<br />
zugehörige Gleichung<br />
(VERÄNDERUNG=ZERFALLSRATE∗MENGE)<br />
Man kann eine Lösung sofort hinschreiben:<br />
u ′ (t) = −αu(t). (1.1)<br />
u(t) = ce −αt . (1.2)<br />
Nachdem zum Zeitpunkt t = 0 gelten muss, dass u(0) = u 0 erhält man<br />
c = u 0 . Aus dieser Beziehung leitet man leicht ab, wielange es dauert, bis<br />
sich die Menge der radioaktiven Substanz halbiert hat. Ist nämlich u(T) =<br />
1<br />
2 u 0, so rechnet man daraus T = ln(2)/α. Dieser Wert ist unabhängig von<br />
u 0 <strong>und</strong> daher gilt immer<br />
u(t + T) = u(t)/2. (1.3)<br />
T wird als Halbwertszeit bezeichnet. Sie charakterisiert, wie wir eben gesehen<br />
haben, den Zerfallsprozess. Wiederum haben wir es hier mit einem<br />
Anfangswertproblem zu tun. Allgemein führen Wachstums- oder<br />
Zerfallsprozesse, wobei die Veränderung proportional zur gegenwärtigen<br />
Größe ist, auf <strong>Differentialgleichungen</strong> von der Gestalt (1.1).<br />
Das Verhulstsche Modell zur Populationsdynamik<br />
Wir kehren zur Diskussion von Populationen zurück. Hat man keine strenge<br />
Generationenfolge, so ist es sinnvoller eine kontinuierliche Zeit zu verwenden,<br />
wir schreiben dies als Differentialgleichung. Es sei x(t) die Funktion,<br />
die die Anzahl der Individuen zum Zeitpunkt t ∈Êangibt, dann ist
1.1. EINFÜHRENDE BEISPIELE 13<br />
die Veränderung proportional zur Anzahl. Sei b > 0 wieder die Geburtenrate,<br />
d > 0 die Rate der Sterbefälle. Dann ist<br />
dx<br />
dt<br />
= (b − d)x(t).<br />
Gibt man sich noch die Anzahl x 0 zu einem bestimmten Zeitpunkt t 0 vor,<br />
so schreiben wir mit β = b − d ein Anfangswertproblem<br />
dx<br />
= βx<br />
dt<br />
x(t 0 ) = x 0 .<br />
(1.4)<br />
Diese Schreibweise besagt, dass wir eine differenzierbare Funktion x :<br />
Ê→Êsuchen, deren Ableitung an der Stelle ein konstantes Vielfaches<br />
vom Wert x(t) ist, <strong>und</strong> die an der Stelle t 0 den Wert x 0 annimmt.<br />
Ob es eine solche Funktion gibt, ist a priori nicht klar. Für diesen einfachen<br />
Fall können wir das Existenzproblem durch Angabe einer Lösung<br />
klären: sei<br />
x(t) = x 0 e β(t−t 0) .<br />
Dann ist x(t 0 ) = x 0 <strong>und</strong><br />
dx<br />
dt (t) = wx 0e w(t−t 0) = wx(t).<br />
Natürlich stellt sich auch die Frage nach der Eindeutigkeit dieser Lösung.<br />
Dieses Modell für Wachstum ist natürlich sehr einfach, es gibt nur drei<br />
Möglichkeiten exponentielles Wachstum (w > 0), zeitlich konstantes Verhalten<br />
w = 0 <strong>und</strong> exponentielles Aussterben (Radioaktivität) w < 0.<br />
Verhalten, wie z.B. Wachstum bis zu einer Sättigungsgrenze ist dabei<br />
nicht möglich.<br />
Ist β positiv, hat man ein Bevölkerungswachstum, ähnlich der Halbwertszeit<br />
gibt es nun eine Verdoppelungszeit T = ln(2)/β. Beobachtet man in<br />
der Realität ein Wachstum, das noch stärker ist (Verkürzung der Verdoppelungszeiten),<br />
dann ist (1.4) kein geeignetes Modell. Ein schwerwiegender<br />
Nachteil dieses Modells ist die Vorhersage grenzenlosen Wachstums.<br />
Dies kann wegen der Endlichkeit aller Dinge nicht vorliegen, so gab es<br />
schon lange Versuche die Gleichung (1.4) zu modifizieren. Ein solches Modell<br />
ist die Einführung eines Stressfaktors S, der proportional zur Anzahl
14 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
der Begegnungen von Individuen der Population ist. Diese ist proportional<br />
zu p 2 . Damit erhält man<br />
p ′ = βp − Sp 2 . (1.5)<br />
Die hier angegebene Gleichung wird oft als logistische Gleichung bezeichnet.<br />
Sie geht auf den belgischen Mathematiker VERHULST 2 zurück.<br />
1.1.3 Diskrete Dynamik mit kontinuierlichen Zustandsraum<br />
In diesem Unterabschnitt sei X = [0, 1] der Zustandsraum. Wir betrachten<br />
eine Vorschrift aus dem Zustand zum Zeitpunkt t ∈Æeinen Zustand zum<br />
Zeitpunkt t + 1 zu erhalten, indem wir eine Funktion f : X → X angeben,<br />
also<br />
x n+1 = f(x n ).<br />
Um den Anfangswert der Entwicklung anzugeben, schreiben wir noch<br />
x 0 ∈ X vor.<br />
1. f(x) = x + b mod 1<br />
In diesem Fall unterscheidet sich das Verhalten erheblich, je nachdem<br />
ob b ∈Éoder b ∈Ê\Éist.<br />
Satz 1.1.3.1 Ist b ∈É, so gilt für alle x 0 ∈ X, dass die Folge {x n } n∈Æmit<br />
x n+1 = f(x n ) periodisch ist.<br />
Ist b /∈É, so gibt es kein x 0 ∈ X, so dass die zugehörige Folge periodisch<br />
ist. Es gilt sogar, dass für jedes x ∈ X die zugehörige Folge {x n } n∈Ædicht<br />
in X ist, d.h. zu jedem y ∈ X <strong>und</strong> jedem Anfangswert x 0 gibt es eine<br />
Teilfolge<br />
{x nk } k∈Æ⊂ {x n } n∈Æ,<br />
so dass<br />
Beweis. siehe Übungen.<br />
lim<br />
k→∞ x n k<br />
= y.<br />
2 Pierre-Francois Verhulst (28.10.1804-15.2.1849) war Professor an der Freien Universität<br />
in Brüssel <strong>und</strong> später an der königlichen Militärschule. Seine Arbeiten zum Bevölkerungswachstum<br />
machten ihn zum Begründer der Bevölkerungsstatistik.
1.1. EINFÜHRENDE BEISPIELE 15<br />
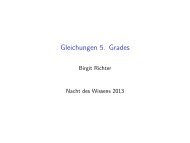
Abbildung 1.1: Am Pendel wirkende Kraft bei einer Auslenkung ϕ<br />
2. f(x) = 2x mod 1<br />
In diesem Fall ist 0 ein Fixpunkt, d.h. f n (0) = 0, die Anfangswerte 2 −n<br />
führen auf eine Folge, die nach einer geeigneten Verschiebung mit<br />
diesem Fixpunkt übereinstimmen. Rationale Anfangswerte führen<br />
auf periodisches Verhalten, irrationale Anfangswerte führen auf komplizierte<br />
Folgen.<br />
1.1.4 Das Pendel<br />
Hier hat man es mit folgender Aufgabenstellung zu tun: Ein Pendel der<br />
Länge l <strong>und</strong> Masse M sei an einem festen Punkt P aufgehängt <strong>und</strong> schwinge<br />
in einer Ebene um die untere Ruhelage. Wir wollen den zeitlichen Verlauf<br />
der Bewegung untersuchen. Zunächst vereinbaren wir eine Konvention:<br />
Da die unabhängige Variable die Zeit ist, werden wir sie, wie allgemein<br />
üblich, mit t ∈Êbezeichnen. Bei der zu beschreibenden Bewegung reicht<br />
es offensichtlich, die Winkelauslenkung ϕ zu jedem Zeitpunkt t anzugeben.<br />
Wir werden die Bewegung also durch eine (gesuchte) Funktion ϕ(t)<br />
beschreiben. Wie erhält man eine Gleichung für ϕ? Dazu betrachten wir<br />
Abbildung 1.1: Mit −g bezeichnen wir die Erdbeschleunigung, dann wirkt<br />
auf M die Kraft −Mg, wobei der radiale Anteil dafür sorgt, dass der Faden<br />
gespannt bleibt, während der tangentiale Anteil für die Winkelbeschleunigung<br />
lϕ ′′ (t) sorgt. Als tangentialen Kraftanteil erhält man −Mg sin ϕ(t).
16 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
Damit ergibt sich als Gleichung (aus dem Newtonschen Kraftgesetz 3 )<br />
(KRAFT=MASSE∗BESCHLEUNIGUNG):<br />
Mlϕ ′′ (t) = −Mg sin ϕ(t)<br />
oder<br />
ϕ ′′ (t) = − g sin ϕ(t). (1.6)<br />
l<br />
1.1.5 Wortspiele<br />
Wir kommen nochmals auf dynamische <strong>Systeme</strong> mit diskreter Zeit in einem<br />
diskreten Zustandsraum zurück. In diesem kurzen Abschnitt wollen<br />
wir eine bestimmte Form sogenannter selbstreferentieller Sätze betrachten.<br />
Wir wollen zeigen, dass die Theorie dynamischer <strong>Systeme</strong> nichttriviale<br />
Aussagen zu diesem Themenkomplex machen kann. Um einen formalen<br />
Unterschied zu machen zwischen diesen Sätzen <strong>und</strong> den Aussagen<br />
über diese Sätze, formulieren wir diese in Englisch. Ein erstes Beispiel ist<br />
der Satz<br />
In this sentence, the number of occurrences of 0 is 1, of 1 is 11,<br />
of 2 is 2, of 3 is 1, of 4 is 1, of 5 is 1, of 6 is 1, of 7 is 1, of 8 is 1,<br />
and of 9 is 1.<br />
Dieser Satz ist offensichtlich wahr, gibt es noch weitere solcher Sätze? Charakteristisch<br />
für diesen Satz ist offensichtlich, dass jeder natürlichen Zahl<br />
0 ≤ z ≤ 9<br />
eine Zahl zugeordnet, die die Anzahl des Auftretens dieser Ziffer angibt.<br />
Dies bedeutet, dass der Satz durch einen Punkt im RaumÆ10 vollständig<br />
beschrieben ist. Wir wollen nun eine Abbildung auf der Menge solcher<br />
Sätze definieren <strong>und</strong> betrachten dazu einen beliebigen Satz, z.B. den Satz<br />
3 Isaac Newton (4.1.1643-31.3.1727) ist der berühmteste britische Mathematiker, Physiker<br />
<strong>und</strong> Astronom. Es ist einer der wenigen Wissenschaftler dem die Ehre zu Teil wurde<br />
in der Westminster Abbey begraben zu werden. Er schuf die Gr<strong>und</strong>lagen unseres<br />
Verständnisses der Gravitation <strong>und</strong> der klassischen Mechanik. Er entdeckte die axiomatischen<br />
Gr<strong>und</strong>lagen der rationalen Mechanik. Innerhalb der Mathematik war er einer der<br />
Wegbereiter der Analysis <strong>und</strong> damit der Theorie der <strong>Differentialgleichungen</strong>.
1.1. EINFÜHRENDE BEISPIELE 17<br />
In this sentence, the number of occurrences of 0 is 0, of 1 is 0, of<br />
2 is 0, of 3 is 0, of 4 is 0, of 5 is 0, of 6 is 0, of 7 is 0, of 8 is 0, and<br />
of 9 is 0.<br />
Nun zählen wir in diesem offensichtlich unwahren Satz das Auftreten jeder<br />
Ziffer <strong>und</strong> schreiben dies in den nächsten Satz, damit erhalten wir<br />
In this sentence, the number of occurrences of 0 is 11, of 1 is 1,<br />
of 2 is 1, of 3 is 1, of 4 is 1, of 5 is 1, of 6 is 1, of 7 is 1, of 8 is 1,<br />
and of 9 is 1.<br />
Eine erneute Anwendung dieses Verfahrens liefert<br />
In this sentence, the number of occurrences of 0 is 1, of 1 is 12,<br />
of 2 is 1, of 3 is 1, of 4 is 1, of 5 is 1, of 6 is 1, of 7 is 1, of 8 is 1,<br />
and of 9 is 1.<br />
Nun auch dieser Satz ist unwahr, wir wenden unser Verfahren nochmals<br />
an <strong>und</strong> erhalten<br />
In this sentence, the number of occurrences of 0 is 1, of 1 is 11,<br />
of 2 is 2, of 3 is 1, of 4 is 1, of 5 is 1, of 6 is 1, of 7 is 1, of 8 is 1,<br />
and of 9 is 1.<br />
Dies ist unser (wahrer) Satz von oben. Dieser reproduziert sich unter der<br />
angegebenen Iteration. Wir halten eine nahezu triviale Beobachtung fest:<br />
Lemma 1.1.5.1 Ein Satz der angegebenen Form bleibt unter der angegebenen<br />
Abbildung genau dann erhalten, wenn er wahr ist.<br />
Damit ist das Auffinden weiterer (oder aller) solchen wahren Sätze darauf<br />
zurückgeführt, Fixpunkte unserer Abbildung zu finden. In mathematischer<br />
Sprache hat die Abbildung die Form<br />
Ψ :Æ10 →Æ10 : (z 0 , . . .,z 9 ) T ↦→ (1 + w(0), . . ., 1 + w(9)) (1.7)<br />
wobei w(j) die Anzahl des Auftretens der Ziffer j in den Zahlen z 0 , . . .,z 9<br />
angibt. Wir werden im weiteren Verlauf des Semesters alle solchen Sätze<br />
angeben <strong>und</strong> zeigen, dass dies tatsächlich eine vollständige Liste ist.
18 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
1.2 Gr<strong>und</strong>legende Begriffe<br />
1.2.1 Metrische Räume<br />
Definition 1.2.1.1 Es sei X eine Menge, d : X × X →Êeine Abbildung mit<br />
folgenden Eigenschaften<br />
(M1) Es gilt d(x, y) = 0 genau dann wenn x = y.<br />
(M2) Für alle Paare (x, y) ∈ X × X gilt d(x, y) = d(y, x).<br />
(M3) Für alle Tripel (x, y, z) ∈ X × X × X gilt<br />
d(x, z) ≤ d(x, y) + d(y, z).<br />
Eine solche Abbildung heißt Metrik, das Paar (X, d) bezeichnen wir als metrischen<br />
Raum.<br />
Aufgabe 1.2.1.2 Zeigen Sie: ist (X, d) ein metrischer Raum, sind x, y ∈ X, so<br />
gilt d(x, y) ≥ 0.<br />
Definition 1.2.1.3 1. Es sei (X, d) ein metrischer<br />
{<br />
Raum , U ⊂ X heißt<br />
}<br />
offen,<br />
wenn es zu jedem x ∈ U ein ε > 0 mit y ∈ X ∣ d(x, y) < ε =<br />
B ε (x) ⊂ U. B ε (x) heißt metrische Kugel um x vom Radius ε. Dabei ist<br />
im allgemeinen klar auf welche Metrik wir uns beziehen. Sollte dies nicht<br />
klar sein, so schreiben wir Bε d(x).<br />
2. Eine Teilmenge A ⊂ X heißt abgeschlossen, wenn X \ A offen ist.<br />
Lemma 1.2.1.4 1. Beliebige Vereinigungen offener Mengen in X sind offen,<br />
d.h. ist {U α } α∈eine über der Mengeparametrisierte Familie offener<br />
Mengen, so ist<br />
⋃<br />
α offen in X.<br />
α∈U<br />
2. Auf gleiche Weise folgt, dass beliebige Durchschnitte abgeschlossener Mengen<br />
abgeschlossen sind.<br />
Definition 1.2.1.5 Seien (X, d), (Y, d ′ ) metrische Räume <strong>und</strong> ist f : X → Y<br />
eine Abbildung, so heißt f stetig, wenn Urbilder offener Mengen in Y offen in<br />
X sind, d.h. für alle offenen Mengen V ⊂ Y ist f −1 (V ) eine offene Menge in<br />
(X, d).
1.2. GRUNDLEGENDE BEGRIFFE 19<br />
Satz 1.2.1.6 Folgende Bedingungen sind äquivalent zur Stetigkeit von f : X →<br />
Y.<br />
1. Urbilder abgeschlossener Mengen sind abgeschlossen.<br />
2. Ist A ⊂ X eine Teilmenge, so ist f(A) ⊂ f(A).<br />
3. Ist x 0 ∈ X <strong>und</strong> {x n } n∈Æeine Folge in X mit<br />
lim<br />
n→∞ x n = x 0<br />
so gilt {f(x n )} n∈Æist eine konvergente Folge <strong>und</strong><br />
lim f(x n) = f(x 0 ).<br />
n→∞<br />
Beweis. Übungsaufgabe.<br />
Definition 1.2.1.7 Eine stetige Abbildung f : X → Y heißt Homöomorphismus,<br />
falls f injektiv <strong>und</strong> offen ist, dabei heißt f offen, wenn Bilder offener Mengen<br />
offen sind.<br />
1.2.2 Vollständige metrische Räume<br />
Definition 1.2.2.1 Es sei (X, d) ein metrischer Raum.<br />
(a) Eine Folge {x n } n∈Æ⊂X nennt man Cauchyfolge 4 , wenn zu jedem ε > 0<br />
eine natürliche Zahl N ∈Æexistiert mit<br />
n > N, m > N ⇒ d(x n , x m ) < ε.<br />
4 Augustin-Louis Cauchy (21.8.1789-22.5.1857) war Sohn eines hohen Beamten <strong>und</strong> genoss<br />
demzufolge eine gute Privatausbildung. Nach einem ingenieurwissenschaftlichen<br />
Studium eignete er sich nebenbei Werke von Lagrange an. Im Jahr 1811 löste er ein Problem,<br />
das Lagrange formuliert hatte. Er arbeitete über Integrale, Strömungsmechanik<br />
<strong>und</strong> Elastizitätstheorie. Speziell die Arbeiten zum letztgenannten Bereich machten ihn<br />
zu einem der bekanntesten Mathematiker seiner Zeit. Im weiteren arbeitete er auf vielen<br />
Gebieten, sein Hauptarbeitsgebiet wurde die Analysis mit der Theorie von <strong>Differentialgleichungen</strong>.<br />
Nach Gauß begann er mit komplexen Zahlen <strong>und</strong> der zugehörigen Analysis<br />
zu arbeiten. Cauchy war sehr produktiv <strong>und</strong> dies sehen wir noch heute an vielen Konzepten,<br />
die seinen Namen tragen.
20 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
(b) Ein metrischer Raum (X, d) heißt vollständig, wenn zu jeder Cauchyfolge<br />
{x n } n∈Æin X ein Element x ∈ X existiert, so dass gilt<br />
x = lim<br />
n→∞<br />
x n .<br />
Dies bedeutet natürlich: Zu jedem ε > 0 existiert ein N ∈Æ, so dass gilt<br />
n > N ⇒ d(x n , x) < ε.<br />
Eine reiche Klasse von metrischen Räumen sind normierte Vektorräume.<br />
Wir werfen einen Blick darauf.<br />
Definition 1.2.2.2 Sei X ein reeller Vektorraum.<br />
(a) Man nennt (X, ‖.‖) einen normierten Raum, falls ‖.‖ X eine Abbildung<br />
‖.‖ X : X →Êist, so dass<br />
gilt.<br />
1. ‖x‖ X ≥ 0 ∀x ∈ X;<br />
2. ‖x‖ X = 0 ⇐⇒ x = 0;<br />
3. ‖x + y‖ X ≤ ‖x‖ X + ‖y‖ X ∀(x, y) ∈ X × X;<br />
4. ‖αx‖ X = |α|‖x‖ X ∀α ∈Ê, ∀x ∈ X<br />
Ohne Beweis geben wir das folgende (triviale) Lemma an.<br />
Lemma 1.2.2.3 Mit<br />
d(x, y) = ‖x − y‖ X (1.8)<br />
wird ein normierter linearer Raum (X, ‖.‖ X ) zum metrischen Raum (X, d).<br />
Definition 1.2.2.4 Ist ein normierter, linearer Raum (X, ‖.‖ X ) bezüglich der<br />
Metrik aus (1.8) vollständig, so bezeichnet man ihn als Banachraum, nach STE-<br />
FAN BANACH 5 .<br />
5 Stefan Banach (30.3.1892-31.8.1945), polnischer Mathematiker, war der Begründer<br />
der Theorie linearer, normierter Räume <strong>und</strong> ihren linearen Abbildungen. Seine Arbeiten<br />
sind die Gr<strong>und</strong>lage der modernen Funktionalanalysis. Er <strong>und</strong> seine Schüler zeigten<br />
viele Anwendungen der Funktionalanalysis auf.
1.2. GRUNDLEGENDE BEGRIFFE 21<br />
In dieser Vorlesung werden wir vor allem den folgenden Banachraum<br />
benötigen.<br />
Lemma 1.2.2.5<br />
1. Es sei I ⊂Êein kompaktes Intervall. Wir betrachten<br />
{<br />
}<br />
C(I;Ên ) = γ : I →Ên<br />
∣ γ ist stetig .<br />
Dies wird mit der Norm<br />
ein Banachraum.<br />
‖γ‖ C(I;Ên ) = sup ‖γ(t)‖Ên<br />
t∈I<br />
2. Ist U ⊂Ên eine offene Teilmenge, so ist<br />
{<br />
}<br />
C(I; U) = γ : I → U ∣ γ ist stetig<br />
ein vollständiger metrischer Raum bezüglich der Metrik<br />
Beweis. Übungen!<br />
d C(I;U) (γ 1 , γ 2 ) = sup ‖γ 1 (t) − γ 2 (t)‖Ên<br />
t∈I<br />
Definition 1.2.2.6 Sei (X, d) ein metrischer Raum. Eine Abbildung T : X → X<br />
heißt Kontraktion, falls für alle (x, y) in X × X gilt:<br />
d(Tx, Ty) < d(x, y). (1.9)<br />
T nennt man stark kontrahierend, wenn es ein λ ∈ (0, 1) gibt, so dass für alle<br />
(x, y) ∈ X × X gilt<br />
d(Tx, Ty) ≤ λd(x, y). (1.10)<br />
Satz 1.2.2.7 (Banach) Es sei (X, d) ein vollständiger metrischer Raum. Jede stark<br />
kontrahierende Abbildung T : X → X hat einen eindeutig bestimmten Fixpunkt<br />
x ∈ X.<br />
Beweis. Wir zeigen zunächst die Eindeutigkeit. Angenommen x 1 , x 2 sind<br />
Fixpunkte. Dann ist<br />
d(x 1 , x 2 ) = d(Tx 1 , Tx 2 ) < λd(x 1 , x 2 ).
22 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
Also ist d(x 1 , x 2 ) = 0 <strong>und</strong> wegen folgt x 1 = x 2 .<br />
Wir kommen zur Existenz. Sei x 0 ∈ X beliebig. Wir konstruieren die Folge<br />
{x n } n∈Æ⊂ X durch x n = Tx n−1 <strong>und</strong> behaupten, dass dies eine Cauchyfolge<br />
ist. Dazu sei ε > 0 gegeben. Für m, n ∈Æ, m > n ≥ 1 ergibt sich mit<br />
(M.3)<br />
d(x m , x n ) ≤ d(x m , x m−1 ) + · · · + d(x n+1 , x n ) =<br />
Für ein j im angegebenen Bereich schließt man<br />
Also hat man<br />
m−1<br />
∑<br />
j=n<br />
d(x j+1 , x j ) = d(T j x 1 , T j x 0 ) ≤ λ j d(x 1 , x 0 ).<br />
d(x j+1 , x j )<br />
d(x m , x n ) ≤<br />
m∑<br />
λ j d(x 1 , x 0 ) ≤<br />
j=n<br />
∞∑<br />
λ j d(x 1 , x 0 ) < ε<br />
j=n<br />
solange nur n genügend groß ist. Mit der Vollständigkeit von (X, d) ergibt<br />
sich die Konvergenz der Folge {x n } n∈Æ. Mit x bezeichnen wir den Grenzwert.<br />
Der letzte Schritt besteht darin die Fixpunkteigenschaft des Grenzwertes<br />
nachzuweisen. Dazu sei ε > 0 gegeben <strong>und</strong> N ∈Æ, so dass n > N<br />
impliziert<br />
Dann ist für n > N<br />
d(x n , x) < ε 2 .<br />
d(Tx, x) ≤ d(Tx, x n ) + d(x n , x)<br />
= d(Tx, Tx n−1 ) + d(x n , x)<br />
≤ λd(x, x n−1 ) + d(x n , x)<br />
≤ 2d(x n , x)<br />
< ε.<br />
Da ε > 0 beliebig ist, ist<br />
<strong>und</strong> damit<br />
d(Tx, x) = 0<br />
Tx = x.
1.2. GRUNDLEGENDE BEGRIFFE 23<br />
Bemerkung 1.2.2.8 Ein alternativer Beweis für die Fixpunkteigenschaft besteht<br />
in der Beobachtung, dass T stetig ist (warum?) <strong>und</strong> dem Diagramm<br />
x n+1 = Tx n → Tx<br />
↓<br />
x<br />
Satz 1.2.2.9 (Stetige Abhängigkeit) Sei ( X , d) ein vollständiger metrischer<br />
Raum, (Y, d ′ ) ein metrischer Raum. Ferner sei für jedes y ∈ Y eine starke<br />
Kontraktion T y : X → X mit Kontraktionskonstante λ y gegeben. Es sei s =<br />
sup y∈Y λ y < 1. Für jedes x ∈ X sei die Abbildung<br />
stetig. Dann ist auch die Abbildung<br />
F x : Y → X : y ↦→ T y x<br />
stetig, wobei x y durch T y x y = x y definiert ist.<br />
G : Y → X : y ↦→ x y , (1.11)<br />
Beweis. Fixiere y 0 ∈ Y. Wir zeigen die Stetigkeit in y 0 . Sei x 0 der zugehörige<br />
Fixpunkt von T y0 . Dann gilt für den Fixpunkt x y von T y ,<br />
d(x y , x 0 ) = d(T y x y , T y0 x 0 )<br />
≤ d(T y x y , T y x 0 ) + d(T y x 0 , T y0 x 0 )<br />
≤ λ y d(x y , x 0 ) + d(T y x 0 , T y0 x 0 ).<br />
(1.12)<br />
Es folgt<br />
(1 − s)d(x y , x 0 ) ≤ (1 − λ y )d(x y , x 0 ) ≤ d(T y x 0 , T y0 x 0 ).<br />
Wegen s < 1 darf man durch (1 − s) teilen <strong>und</strong> die Behauptung folgt aus<br />
der Stetigkeit von F x0 .<br />
1.2.3 Eingebettete Mannigfaltigkeiten<br />
Mannigfaltigkeiten treten in natürlicher Weise im Kontext von gewöhnlichen<br />
<strong>Differentialgleichungen</strong> auf. Kurz (<strong>und</strong> vielleicht etwas vereinfacht)<br />
gesagt, besteht die Aufgabenstellung in der Theorie der gewöhnlichen <strong>Differentialgleichungen</strong><br />
darin zu einem (hinreichend glatten) Feld von Geschwindigkeitsvektoren<br />
eine Bewegung zu finden, so dass an jeder Stelle
24 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
der Bewegung der Tangentialvektor an die Bewegung dem dort vorgegebenen<br />
Geschwindigkeitsvektor entspricht. Schon die Bewegung eines Zuges<br />
macht deutlich, dass der Geschwindigkeitsvektor des Zuges nicht innerhalb<br />
des Bewegungsraumes liegen muss, sondern, dass eine geeignete<br />
Beschreibung des Problemes die Menge der möglichen Geschwindigkeitsvektoren<br />
deutlich von der Menge der Orte der Bewegung unterscheidet.<br />
Noch deutlicher wird dies bei einem sphärischen Pendel, als einem an<br />
einem gespannten Faden hängenden <strong>Gew</strong>icht, welches an einem Punkt<br />
aufgehängt ist <strong>und</strong> sich nun auf einer 2-dimensionalen Kugeloberfläche<br />
bewegen kann. Was sind in diesem Fall die möglichen Geschwindigkeitsvektoren?<br />
Die geeignete Konstruktion, die mathematisch präzise diese Situation beschreibt<br />
ist die eines Tangentialbündels an einer Mannigfaltigkeit. Da die<br />
ganz allgemeine Konstruktion auf gewisse begriffliche Schwierigkeiten<br />
führt, die ein wenig von der uns angestrebten Theorie wegführt, wollen<br />
wir uns auf eine scheinbar speziellere Situation beschränken, die aber aufgr<strong>und</strong><br />
des Einbettungssatzes von Whitney, siehe z.B. Bröcker & Jänich [5]<br />
für eine Formulierung <strong>und</strong> einen Beweis, sogar der allgemeinsten Situation<br />
entspricht, aber technisch etwas einfacher ist. Wir erinnern zunächst an<br />
die Beschreibung eines k-dimensionalen linearen Unterraumes U desÊn .<br />
Wir können einen solchen Raum auf zwei Weisen<br />
∈Ê<br />
beschreiben:<br />
1. Wir geben k linear unabhängige Vektoren u 1 , . . .,u k an, die den Raum<br />
aufspannen, damit können wir jeden Punkt u ∈ U als Linearkombination<br />
k∑<br />
u = α k u k , α k<br />
i=1<br />
schreiben.<br />
2. Wir geben n − k linear unabhängige Vektoren u ′ 1 , . . .,u′ n−k ∈Ên an,<br />
so dass für alle u ∈ U gilt<br />
〈u, u ′ j〉 = 0, j = 1, . . .,n − k.<br />
Dann haben wir die Punkte in U als Lösungen eines Systems von n−k<br />
Gleichungen realisiert.<br />
Wir wollen uns die letztgemachte Beobachtung zu eigen machen.
1.2. GRUNDLEGENDE BEGRIFFE<br />
→Ê<br />
25<br />
Definition 1.2.3.1 1. Eine Teilmenge M ⊂Ên heißt eingebettete Untermannigfaltigkeit<br />
wenn es zu jedem x ∈ M eine offene Umgebung B δ (x) ⊂<br />
Ên <strong>und</strong> n − k stetig differenzierbare Funktionen<br />
Fi x : B δ (x)<br />
gibt, so dass<br />
{<br />
}<br />
(a) M ∩ B δ (x) = y ∈ B δ (x) ∣ Fj x(y) = 0, j = 1, . . .,n − k<br />
(b) {∇F x j (x)} j=1,...,n−k ist linear unabhängig.<br />
2. Ist M eine eingebettete Untermannigfaltigkeit, x ∈ M <strong>und</strong> sind F x j Funktionen,<br />
wie gerade benannt, so ist<br />
T x M = span[∇F x 1 (x), . . . ∇F x n−k (x)]⊥<br />
der Tangentialraum an M im Punkt x.<br />
3. Wir betrachten die disjunkte Vereinigung der Tangentialräume<br />
TM = ˙⋃x∈M T xM<br />
<strong>und</strong> bezeichnen dies als Tangentialbündel.<br />
Wir können hier schon einen Nachteil unserer Konstruktion erkennen.<br />
TM ist keine in denÊn eingebettete Untermannigfaltigkeit. Der schon zitierte<br />
Satz von Whitney garantiert eine Einbettung dieses Tangentialbündels<br />
in denÊ4n+1 . Dies erscheint hochgradig unnatürlich. Arbeitet man mit<br />
dem abstrakten Begriff einer Mannigfaltigkeit kann man direkt zeigen,<br />
dass TM wieder eine Mannigfaltigkeit ist. Die allgemeine Konstruktion<br />
findet man bei [5], oder auch in dem sehr schönen Buch von Warner [20].<br />
Eingebettete Untermannigfaltigkeiten M erben in natürlicher Weise eine<br />
Metrik vom umgebenden RaumÊn , indem man einfach die Metrik d<br />
des RaumesÊn auf M einschränkt. Damit sind dann für eingebettete Untermannigfaltigkeiten<br />
M ⊂Êm <strong>und</strong> N ⊂Ên auch stetige Abbildungen<br />
von M nach N erklärt. Wir wollen noch den Begriff der Differenzierbarkeit<br />
von Abbildungen zwischen solchen eingebetteten Untermannigfaltigkeiten<br />
einführen <strong>und</strong> zeigen, dass die Ableitung eine lineare Abbildung<br />
zwischen entsprechenden Tangentialräumen ist.<br />
Dazu betrachten wir Kurven, als Abbildungen γ : I → M eines reellen<br />
Intervalles I ⊂Ê.
26 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
Definition 1.2.3.2 Die Kurve γ : I → M heißt im Punkt t 0 ∈ I differenzierbar,<br />
wenn γ : I →Ên als Funktion in denÊn im Punkt t 0 differenzierbar<br />
ist.<br />
Lemma 1.2.3.3 Ist γ : I → M im Punkt t 0 ∈ I differenzierbar, so ist γ ′ (t 0 ) ∈<br />
T γ(t0 )M.<br />
Beweis. γ(t) ∈ M impliziert, wegen x 0 = γ(t 0 ), dass es ein δ 1 > 0 gibt, so<br />
dass |t − t 0 | < δ 1 , dass γ(t) ∈ B δ (x) <strong>und</strong> F x j (γ(t)) = 0 für j = 1, . . .,n − k.<br />
Insbesondere impliziert dies<br />
Damit ist γ ′ (t 0 ) ∈ T x0 M.<br />
〈∇F x j (x 0), γ ′ (t 0 )〉 = 0.<br />
Definition 1.2.3.4 Es seien M ⊂Êm <strong>und</strong> N ⊂Ên eingebettete Untermannigfaltigkeiten,<br />
f : M → N sei stetig. Dann heißt f : M → N im Punkt x 0 ∈ M<br />
differenzierbar, wenn für jede Kurve γ : I → M, die im Punkt t 0 mit γ(t 0 ) = x 0<br />
differenzierbar ist, die Abbildung f ◦ γ : I → N im Punkt t 0 differenzierbar ist.<br />
Lemma 1.2.3.5 Sind M ⊂Êm , N ⊂Ên eingebettete Untermannigfaltigkeiten<br />
<strong>und</strong> ist f : M → N im Punkt x 0 ∈ M differenzierbar, N ∋ y 0 = f(x 0 ), so wird<br />
durch<br />
Df(x 0 ) : T x0 M → T y0 N : γ ′ (t 0 ) ↦→ (f ◦ γ) ′ (t 0 )<br />
eine lineare Abbildung definiert.<br />
Beweis. Ist<br />
<strong>und</strong><br />
so gilt für t nahe t 0 <strong>und</strong> l = 1, 2<br />
<strong>und</strong> entsprechend<br />
γ 1 (t 0 ) = γ 2 (t 0 )<br />
γ ′ 1 (t 0) = γ ′ 2 (t 0)<br />
γ l (t) = γ l (t 0 ) + (t − t 0 )γ ′ l (t 0) + o(|t − t 0 |)<br />
f ◦ γ l (t) = f(x 0 ) + (t − t 0 )(f ◦ γ l ) ′ (t 0 ) + o(|t − t 0 |)
1.2. GRUNDLEGENDE BEGRIFFE 27<br />
Gleichsetzen dieser Terme <strong>und</strong> Koeffizientenvergleich führt auf<br />
Df(x 0 )γ ′ (t 0 ) = (f ◦ γ) ′ (t 0 ).<br />
Natürlich muss gezeigt werden, dass diese Definition unabhängig von der<br />
gewählten Kurve ist, also sind γ 1 , γ 2 zwei Kurven mit<br />
γ 1 (t 0 ) = γ 2 (t 0 ) <strong>und</strong> γ ′ 1(t 0 ) = γ ′ 2(t 0 ).<br />
Eindeutigkeit der Entwicklung ergibt, dass<br />
Df(x 0 )γ ′ 1(t 0 ) = Df(x 0 )γ ′ 2(t 0 ).<br />
Damit ist die Abbildung Df(x 0 ) wohldefiniert, wir müssen noch zeigen,<br />
dass diese linear ist. Dies ist leicht zu zeigen.<br />
Definition 1.2.3.6 1. Es sei U ⊂ÊN offen. Eine Abbildung V : U →ÊN<br />
heißt Vektorfeld auf U.<br />
2. Es sei M ⊂ÊN eine eingebettete Untermannigfaltigkeit, TM das Tangentialbündel<br />
auf M. Eine Abbildung V : M → TM heißt Vektorfeld auf M,<br />
falls für alle x ∈ M gilt<br />
V (x) ∈ T x M.<br />
Ist V als Abbildung in denÊN stetig differenzierbar, so sprechen wir von<br />
einem C 1 -Vektorfeld.<br />
Hängt V zusätzlich von der Zeit ab, also I ⊂Êein Intervall <strong>und</strong><br />
V : U × I →ÊN oder V : M × I → TM<br />
eine Abbildung mit V (x, t) ∈ T x M Fall der eingebetteten Untermannigfaltigkeit,<br />
so sprechen wir von einem zeitabhängigen Vektorfeld.<br />
1.2.4 Halbgruppen von Selbstabbildungen<br />
Wir beginnen mit dem Begriff der ZeitmengeÌ. Dazu dient folgende Definition.<br />
Dazu seien zunächst die folgende Schreibweisen vereinbart.Æ<br />
bezeichne die Menge der natürlichen<br />
}<br />
Zahlen, alsoÆ={1, 2, 3, . . . },Æ0 =<br />
∣∣<br />
=<br />
{r ∈Ê∣ Æ∪{0},Ê+ r ≥ 0 .
28 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
Definition 1.2.4.1 Es seiÌeine der Mengen,Æ0,Ê,Ê+. Dann bezeichen wir<br />
diese als Zeitmenge. Eine unbestimmte Zeitmenge wird i.A. mitÌbezeichnet<br />
werden.<br />
Beachte, dass Zeitmengen als algebraische Struktur Halbgruppen sind. Dabei<br />
heißt eine Menge mit einer assoziativen Verknüpfung Halbgruppe, wenn<br />
es ein (eindeutiges) neutrales Element gibt Die hier als Zeitmengen eingeführten<br />
Halbgruppen tragen in natürlicher Weise auch die Struktur eines<br />
metrischen Raumes.<br />
Definition 1.2.4.2 Es seiÌeine Zeitmenge, (X, d) ein metrischer Raum. Dann<br />
heißt eine stetige Abbildung<br />
ein Fluss, falls für alle x ∈ X<br />
Sei<br />
1. gilt ϕ(0, x) = x.<br />
2. <strong>und</strong> alle s, t ∈ T gilt<br />
ϕ :Ì×X → X<br />
ϕ(s + t, x) = ϕ(s, ϕ(t, x)).<br />
IstÌ=oderÌ=Æ0, so sprechen wir von einem diskreten Fluss,<br />
anderweitig von einem (kontinuierlichen) Fluss.<br />
C(X;X) =<br />
{<br />
}<br />
Ψ : X → X ∣ Ψ ist stetig<br />
die Menge der stetigen Abbildungen auf X. Dann kann man einen Fluss<br />
für festes t ∈Ìals Element von C(X;X) auffassen <strong>und</strong> damit induziert<br />
ein Fluss einen stetigen Halbgruppenhomomorphismus<br />
Φ :Ì→C(X;X)<br />
mit<br />
Φ(0) = 1l X<br />
∈Ì<br />
<strong>und</strong><br />
Φ(t + s) = Φ(t) ◦ Φ(s).<br />
Man beachte, istÌeine Gruppe, so ist Φ ein Gruppenhomomorphismus,<br />
<strong>und</strong> für jedes t ∈ T ist Φ(t) ein Homöomorphismus.<br />
Aufgabe 1.2.4.3 Zeigen Sie, dass im FallÌist Gruppe, tatsächlich für t<br />
die Abbildung Φ(t) ein Homöomorphismus ist.
1.3. GEOMETRISCHE BEGRIFFE 29<br />
1.2.5 Diskrete Dynamik von Selbstabbildungen<br />
Wir wollen hier die allgemeine Situation diskreter dynamischer <strong>Systeme</strong><br />
beschreiben. Das Wort diskret bezieht sich hier auf die Zeit, d.h. als Zeitmengen<br />
kommen also nurÆoderin Frage. Der Zustandsraum X sei<br />
jeweils eine metrischer Raum. Dazu sei f : X → X eine (stetige) Abbildung.<br />
Dann betrachten wir für x ∈ X <strong>und</strong> n ∈Æ0<br />
Φ(n, x) = f n (x).<br />
Diese Abbildung hat offensichtlich die Eigenschaften eines Flusses. Deshalb<br />
können wir folgende Definition vereinbaren.<br />
Definition 1.2.5.1 Es sei (X, d) ein metrischer Raum, f : X → X stetig, dann<br />
nennen wir das Paar (X, f) ein diskretes dynamisches System mit Zeitmenge<br />
Ì=Æ0. Ist f zusätzlich bijektiv, d.h. f −1 existiert, so ist die ZeitmengeÌ=.<br />
1.3 Geometrische Begriffe<br />
1.3.1 Spezielle Orbits <strong>und</strong> ihre Grenzmengen<br />
Im folgenden sei (X, d) ein metrischer Raum,Ìeine Zeitmenge, ϕ : X ×<br />
Ì→X ein Fluss. Wir wollen nun einige Begriffe einführen, die uns in<br />
die Lage versetzen über das Langzeitverhalten einzelner Trajektorien, wie<br />
auch des gesamten Systems zu sprechen.<br />
Definition 1.3.1.1 Es sei X ein metrischer Raum,Ìeine Zeitmenge,<br />
ϕ :Ì×X → X<br />
ein Fluss. Ist x 0 ∈ X so nennen wir die Menge<br />
{<br />
O(x 0 ) = ϕ(t, x) ∣ t ∈Ì}<br />
den Orbit des Punktes x 0 . Entsprechend definieren wir auch die positiven <strong>und</strong><br />
negativen Semiorbits von x 0 durch<br />
{<br />
}<br />
O + (x 0 ) = ϕ(t, x) ∣ t ∈Ì, t ≥ 0<br />
bzw.<br />
O − (x 0 ) =<br />
{<br />
}<br />
ϕ(t, x) ∣ t ∈Ì, t ≤ 0 .
30 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
Definition 1.3.1.2 Besteht ein Orbit eines Punktes x 0 nur aus dem Punkt selbst,<br />
so nennen wir diesen ein Gleichgewicht oder auch eine Ruhelage.<br />
Bemerkung 1.3.1.3 In diskreten dynamischen <strong>Systeme</strong>n kann ein Orbit der keine<br />
Ruhelage ist, eine Ruhelage enthalten. Betrachte<br />
f : [−1, 1] → [−1, 1] : x ↦→ 1 − 2x 2 .<br />
Dann ist f(−1) = −1, insbesondere ist −1 eine Ruhelage, f(1) = −1 <strong>und</strong> damit<br />
ist 1 keine Ruhelage O(1) enthält aber O(−1).<br />
Definition 1.3.1.4 Wir nennen einen Punkt x 0 ∈ X einen periodischen Punkt,<br />
wenn es ein t ∈Ì, t ≠ 0 gibt, mit<br />
ϕ(t, x 0 ) = x 0 .<br />
Ist x 0 keine Ruhelage, so sprechen wir von einem echten periodischen Punkt. In<br />
diesem Fall heißt<br />
}<br />
∣∣<br />
min<br />
{0 < t ∈Ì∣ ϕ(t, x0 ) = x 0<br />
die minimale Periode von x 0 . Jedes t > 0, t ∈Ìmit ϕ(t, x 0 ) = x 0 wird als<br />
Periode bezeichnet. Die Menge<br />
{<br />
ϕ(t, x 0 ) ∣ t ∈Ì}<br />
wird als periodischer Orbit bezeichnet.<br />
Lemma 1.3.1.5 Es sei x 0 ∈ X mit O(x 0<br />
∈Ê<br />
) enthält einen periodischen Punkt x 1 .<br />
Für ein dynamisches System mitÌist Gruppe folgt dann, dass x 0 selbst schon<br />
periodischer Punkt ist.<br />
Beweis. Ist x 1 eine Ruhelage, so ist für alle t<br />
ϕ(t, x 1 ) = x 1 .<br />
Da es ein t 0<br />
∈Ê<br />
gibt, mit<br />
ϕ(t 0 , x 0 ) = x 1<br />
ist x 0 = ϕ(−t 0 , x 1 ) = x 1 . Ist x 1 keine Ruhelage, so ist ϕ(t 1 , x 1 ) = x 1 <strong>und</strong><br />
damit ist für alle s<br />
ϕ(t, ϕ(s, x 1 )) = ϕ(t + s, x 1 ) = ϕ(s, ϕ(t, x 1 )) = ϕ(s, x 1 )<br />
<strong>und</strong> jeder Punkt im Orbit von x 1 ist periodisch, insbesondere auch x 0 .
1.3. GEOMETRISCHE BEGRIFFE 31<br />
Bemerkung 1.3.1.6 Eine entsprechende Aussage für dynamische <strong>Systeme</strong><br />
deren Zeitmenge keine Gruppe ist, ist nicht wahr. Es kann dort Punkte<br />
geben, die selbst nicht periodisch sind, deren positiver Halborbit aber periodische<br />
Punkte enthält. Einen solchen Punkt nennen wir schließlich periodisch<br />
(vgl. engl. eventually periodic).<br />
Gleichgewichtspunkte <strong>und</strong> periodische Orbits sind Beispiele invarianter<br />
Mengen, d.h. solcher Mengen, die unter der Dynamik in sich abgebildet<br />
werden. Wir wollen den Begriff zunächst abstrakt einführen <strong>und</strong> dann<br />
weitere Beispiele angeben.<br />
Definition 1.3.1.7 Es sei X, d) ein metrischer Raum,Ìeine <strong>und</strong><br />
ϕ :Ì×X → X ein Fluss. Eine Teilmenge A ⊂ X heißt invariant, falls zu jedem<br />
x 0 ∈ A auch O(x 0 ) ⊂ A. Ist mit x 0 auch der positive (negative) Semiorbit in A,<br />
so sagen wir, A ist positiv (negativ) invariant.<br />
Definition 1.3.1.8 Gegeben sei ein metrischer Raum (X, d), eine ZeitmengeÌ<br />
<strong>und</strong> ein Fluss ϕ :Ì×X → X. Sei x 0 ∈ X. Wir definieren den Begriff der<br />
Grenzmenge durch<br />
ω(x 0 ) =<br />
0≤t∈ÌO ⋂<br />
+ (ϕ(t, x 0 )),<br />
<strong>und</strong><br />
α(x 0 ) = ⋂<br />
0≥t∈ÌO − (ϕ(t, x 0 )).<br />
Wir nennen ersteres die ω-Grenzmenge von x 0 <strong>und</strong> letzteres die α-Grenzmenge<br />
von x 0 .<br />
Der folgende Satz fasst wesentliche Eigenschaften der jeweiligen Grenzmengen<br />
zusammen.<br />
Satz 1.3.1.9 1. Ist der entsprechende Semiorbit nichtleer ∗ <strong>und</strong> beschränkt ∗∗ ,<br />
so ist die entsprechende Grenzmenge nichtleer.<br />
2. Die ω–Grenzmenge besteht aus der Menge der Punkte<br />
{<br />
}<br />
x ∈ X ∣ es gibt eine Folge {t n } n∈Æ⊂Ìmit lim t n = ∞ <strong>und</strong> x = lim ϕ(t n , x 0 ) .<br />
n→∞ n→∞<br />
Entsprechendes gilt für die α–Grenzmenge.
32 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
3. Die ω–Grenzmenge ist positiv invariant.<br />
4. IstÌeine Gruppe, so sind ω–, bzw. α–Grenzmengen invariant.<br />
∗ Der positive Halborbit ist für jedes x 0 definiert, der negative besteht für<br />
die Zeitmengen+,Ê+ nur aus einem Element. Die Voraussetzung nichtleer<br />
soll im Fall des positiven Semiorbits bedeutungslos sein, im anderen<br />
Fall besagen, dass die Zeitmenge negative Elemente besitzt.<br />
∗∗ Beschränktheit ist in allgemeinen metrischen Räumen nicht definiert,<br />
wir meinen, dass der Abschluss kompakt ist. Für Teilmengen vonÊn folgt<br />
aus der Beschränktheit die Kompaktheit des Abschlusses. Beweis. Wir<br />
führen alle Beweise für die ω–Grenzmenge, für die α–Grenzmenge werden<br />
sie ganz analog erbracht.<br />
1. Vorbemerkung: Ist<br />
x ∈<br />
0≤t∈ÌO ⋂<br />
+ (ϕ(t, x 0 ))<br />
so gibt es zu jedem 0 < t 0 ∈Ì<strong>und</strong> jedem ε > 0 ein t > t 0 <strong>und</strong> ein<br />
x n ∈ O + (ϕ(t, x 0 )) mit d(x n , x) < ε.<br />
Wähle ε > 0 <strong>und</strong> setze<br />
ε n = 2 −n ε<br />
<strong>und</strong> wähle induktiv t n+1 > t n + 1 mit<br />
d(ϕ(x 0 , t n ), x) < ε n .<br />
Dann konvergiert die Zeitfolge t n gegen unendlich, x n = ϕ(t n , x 0 ) →<br />
x. Die Umkehrung ist ebenso einfach. Ist x ein Grenzwert wie beschrieben,<br />
so müssen wir zeigen, zu jedem t > 0 ist<br />
x ∈ O + (ϕ(t, x 0 )).<br />
Da t n → ∞ gibt es ein N ∈Æmit t n > t für alle n > N. Offensichtlich<br />
ist x dann in O + (ϕ(t, x 0 )).<br />
2. Ist x ∈ ω(x 0 ) <strong>und</strong> t > 0. Dann ist x = lim n→∞ ϕ(t n , x 0 ) mit einer<br />
unbeschränkten Zeitfolge {t n } n∈Æ. Dann ist<br />
ϕ(t, x) = ϕ(t, lim<br />
n→∞<br />
x n ) = lim<br />
n→∞<br />
ϕ(t, x n ) = lim<br />
n→∞<br />
ϕ(t, ϕ(t n , x 0 )) = lim<br />
n→∞<br />
ϕ(t+t n , x 0 ).
1.3. GEOMETRISCHE BEGRIFFE 33<br />
3. IstÌeine Gruppe, so kann das eben verwendete Argument ebenso<br />
für negative Zeiten angewendet werden.<br />
Beispiel 1.3.1.10 1. Wir betrachten das dynamische System f : S 1 →Ë1 :<br />
φ ↦→ φ + β. Ist β ∈ πÉ, so ist, wie wir wissen jeder Orbit periodisch<br />
<strong>und</strong> die Grenzmenge sind für den Anfangswert φ 0 mit periodischen Orbit<br />
O = {φ 0 , φ 1 , . . .,φ k }<br />
α(φ 0 ) = ω(φ 0 ) = O.<br />
Ist β ∈ (Ê\É)π, so ist jeder Orbit O(φ 0 ) dicht <strong>und</strong> es gilt<br />
α(φ 0 ) = ω(φ 0 ) = S 1 .<br />
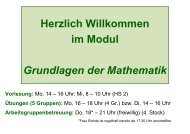
2. Ein etwas allgemeineres Verhalten zeigt die folgende Abbildung 1.2. f bildet<br />
jeweils die roten Punkte auf den nächsten im mathematisch positiven Sinne<br />
ab, entsprechend die blauen Punkte. Dazwischen werden die Segmente<br />
S 1 → S 2 → S 3 → S 1 abgebildet. Die nicht bezeichneten Segemente werden<br />
genauso behandelt. Gleichzeitig soll f die Punkte die Punkte in Richtung<br />
der roten Punte verschieben. Dann gilt für jeden roten Punkt x r,i<br />
ω(x r,i ) = α(x r,i ) = O(x r,i )<br />
<strong>und</strong> entsprechend für jeden blauen Punkt<br />
Für jeden anderen Punkt x ist<br />
ω(x b,i ) = α(x b,i ) = O(x b,i ).<br />
ω(x) = O(x r,i ) <strong>und</strong> α(x) = O(x b,i ).<br />
Definition 1.3.1.11 Es sei (X, d) ein metrischer Raum,Ìeine Zeitmenge <strong>und</strong><br />
ϕ :Ì×X → X ein Fluss. Ein Punkt x 0 ∈ X heißt nichtwandernd, wenn es<br />
zu jeder Umgebung U ein 0 < t ∈Ìgibt mit<br />
ϕ(t, U) ∩ U ≠ ∅.<br />
Die Menge der nichtwandernden Punkte wird mit<br />
{<br />
}<br />
Ω(ϕ) = x ∈ X ∣ x ist nichtwandernd<br />
bezeichnet.
34 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
S<br />
3<br />
S 1<br />
S<br />
2<br />
Abbildung 1.2: Eine Abbildung auf S 1 .<br />
Satz 1.3.1.12 Die Menge der nichtwandernden Punkte ist positiv invariant. Ist<br />
Ìeine Gruppe, so ist Ω(ϕ) invariant.<br />
Beweis. Übungsaufgabe.<br />
Lemma 1.3.1.13 Ist (X, d) ein metrischer Raum,Ìeine Zeitmenge <strong>und</strong><br />
ϕ :Ì×X → X<br />
ein Fluss. Ist M ⊂ X eine (positiv) invariante Teilmenge, so gilt dies auch für<br />
den Abschluss M.<br />
Beweis. Folgt sofort aus den Beweisen der vorangehenden Lemmata.<br />
1.3.2 Stabilität<br />
Definition 1.3.2.1 Es sei (X, d) ein metrischer Raum,Ìeine Zeitmenge <strong>und</strong><br />
ϕ :Ì×X → X<br />
ein Fluss. Eine kompakte, invariante Menge K heißt attraktiv, falls es eine offene<br />
Umgebung U von K gibt, so dass für alle x ∈ U gilt<br />
ω(x) ⊂ K.<br />
Sie heißt global attraktiv, wenn dies für alle x ∈ X gilt.
1.4. DISKRETE VERSUS KONTINUIERLICHE DYNAMIK 35<br />
Definition 1.3.2.2 Es sei (X, d) ein metrischer Raum,Ìeine Zeitmenge <strong>und</strong><br />
ϕ :Ì×X → X<br />
ein Fluss. Eine kompakte, invariante Menge K heißt stabil, falls zu jeder offenen<br />
Umgebung U von K eine Umgebung V von K gibt, so dass für alle x ∈ V gilt<br />
O + (x) ⊂ U.<br />
Definition 1.3.2.3 Eine kompakte, invariante Menge K wird als Attraktor bezeichnet,<br />
wenn K attraktiv <strong>und</strong> stabil ist. K wird als globaler Attraktor bezeichnet,<br />
wenn K ein global attraktiver Attraktor ist.<br />
Eine wesentliche Aufgabe in der Theorie dynamischer <strong>Systeme</strong> ist es (globale)<br />
Attraktoren zu finden <strong>und</strong> die Dynamik auf diesen Attraktoren zu<br />
beschreiben. Die eben definierten Begriffe spielen natürlich für die speziellen<br />
invarianten Mengen wie Ruhelagen <strong>und</strong> periodische Orbits eine<br />
besondere Rolle.<br />
Bemerkung 1.3.2.4 Attraktivität einer invarianten Menge impliziert nicht ihre<br />
Stabilität, wir werden dafür noch ein Beispiel in den Übungen sehen.<br />
Beispiel 1.3.2.5 In unserem Beispiel 1.3.1.10, vgl. Abbildung 1.2 ist die Menge<br />
der roten Punkte ein Attraktor, allerdings kein globaler Attraktor, da die blauen<br />
Punkte eine invariante Menge bildet.<br />
1.4 Diskrete versus kontinuierliche Dynamik<br />
1.4.1 Zeit–1–Abbildungen<br />
Die einfachste Möglichkeit aus einem kontinuierlichen Fluss ein diskretes<br />
dynamisches System zu gewinnen, ist die sogenannte Zeit–1–Abbildung.<br />
Sei (X,d) ein metrischer Raum,Ì=Ê<strong>und</strong><br />
ϕ :Ì×X → X<br />
ein Fluss. Wir definieren die Abbildung<br />
F : X → X : x ↦→ ϕ(1, x).<br />
Offensichtlich ist F ein Homöomorphismus von X → X. Gleichgewichte<br />
für ϕ sind auch solche für F , für periodische Punkte ist dies nicht immer<br />
wahr. Man überzeuge sich von der Richtigkeit dieser Beobachtung.
36 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
1.4.2 Poincaré–Abbildungen<br />
Sei ϕ :Ì×M → M ein differenzierbarer Fluss auf einer Mannigfaltigkeit<br />
M (insbesondere M =Ên oder M = T n ). Das zugehörige Vektorfeld, man<br />
überlege sich, dass es so ein Objekt immer gibt, sei V , also<br />
V (x) = d dt | t=0ϕ(t, x).<br />
Eine Hyperfläche S ist eine Untermannigfaltigkeit von M (also Teilmenge<br />
<strong>und</strong> Mannigfaltigkeit) mit dim S = dim M − 1.<br />
Wenn M =Ên , so ist jeder (n − 1)-dimensionale Unterraum eine Hyperfläche.<br />
Definition 1.4.2.1 Eine Hyperfläche S heißt (globaler) (transversaler) Schnitt<br />
des Flusses ϕ, wenn gilt:<br />
• Das zu ϕ gehörende Vektorfeld V ist nirgends tangential an S.<br />
• Jeder Orbit von ϕ schneidet S unendlich oft für t → ∞ <strong>und</strong> t → −∞.<br />
Wir kommen jetzt zur ersten Definition der Poincaré-Abbildung:<br />
Definition 1.4.2.2 Sei S ein globaler Schnitt von ϕ. Die Wiederkehrzeit τ :<br />
S →Êist definiert durch<br />
τ(x) = min{ϕ(t, x) ∈ S}.<br />
t>0<br />
Es gilt immer τ(x) > 0, da wir vorausgesetzt haben, dass V nicht tangential<br />
an S ist.<br />
Beispiel 1.4.2.3 Wir betrachten den Torus T 2 . Diesen erhalten wir algebraisch<br />
als QutientÊ2 /2 , geometrisch durch Verkleben der Kanten eines Quadrates. Ist<br />
v ∈Ê2 , so können wir aufÊ2 den Fluss ϕ(t, x) = x + tv betrachten. Ein Gerade<br />
orthogonal zu v projiziert nun einem Kreis S auf T 2 , der ein globaler tranversaler<br />
Schnitt zur Projektion von ϕ ist.<br />
Wir können uns die Frage stellen ob wir auf dem globalen Schnitt eine andere<br />
Abbildung, z.B. die aus Abbildung 1.2 vorgeben können <strong>und</strong> dazu einen geeigneten<br />
Fluss konstuieren können (mit einer ”<br />
roten“ <strong>und</strong> einer ”<br />
blauen“ periodischen<br />
Lösung, die vorwärts gegen die rote <strong>und</strong> rückwärts gegen die blaue Lösung konvergiert.<br />
Dies werden wir im folgenden Abschniit behandeln.
1.4. DISKRETE VERSUS KONTINUIERLICHE DYNAMIK 37<br />
Definition 1.4.2.4 Sei S ein globaler Schnitt von ϕ. Dann ist die Poincaré-<br />
Abbildung<br />
P : S → S<br />
definiert durch<br />
P(x) = ϕ(τ(x), x).<br />
Das heißt: Der Punkt x wird auf den Punkt abgebildet, der auf dem Orbit<br />
von x liegt <strong>und</strong> der erste ist, an dem der Orbit von x wieder durch S läuft.<br />
Beispiel 1.4.2.5 Für die Differentialgleichung<br />
(in Polarkoordinaten) ist<br />
ṙ = r(1 − r),<br />
˙θ = 1<br />
S = {(x, 0) : x > 0}<br />
ein globaler Schnitt. Die Wiederkehrzeit ist<br />
τ = 2π<br />
für alle Punkte in S. Da die Differentialgleichung gelöst wird durch<br />
r(t) =<br />
1<br />
1 + (1/r 0 − 1)e −t, θ(t) = t + θ 0,<br />
ist die Poincaré-Abbildung gegeben durch<br />
(<br />
)<br />
1<br />
P(x, 0) =<br />
1 + (1/r 0 − 1)e −2π,0 .<br />
1.4.3 Suspensionen<br />
Wir beobachten, dass nicht jeder (orientierungserhaltende) Diffeomorphismus<br />
als Zeit t 0 -Abbildung eines Flusses auftreten kann. Angenommen x 0 ,<br />
. . . , f k (x 0 ) sei ein periodischer Orbit von f mit minimaler Periode k, der<br />
isoliert liegt, d.h. für den es eine Umgebung U gibt, die keinen Orbit der<br />
Länge k enthält, so ist dies nicht die Zeit t 0 -Abbildung eines Flusses. Angenommen,<br />
dies wäre so, dann gilt<br />
f k ϕ(t, x 0 ) = ϕ(t + k, x 0 ) = ϕ(t, f k x 0 ) = ϕ(t, x 0 ).<br />
Also ist der gesamte Zeitorbit ϕ(t, x 0 ) von x 0 periodisch mit (minimaler)<br />
Periode k für f <strong>und</strong> dies widerspricht der Isoliertheit.
38 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
Definition 1.4.3.1 Sei M eine Mannigfaltigkeit <strong>und</strong> f : M → M ein Diffeomorphismus.<br />
Sei X = (M × [0, 1])/ ∼, wobei die Äquivalenzrelation ∼ definiert<br />
wird durch<br />
(x, 1) ∼ (f(x), 0).<br />
Dann ist der Suspensionsfluss von f auf X definiert durch<br />
ψ t ([(x, θ)]) := [(f ⌊t+θ⌋ (x), t + θ − ⌊t + θ⌋)].<br />
Hierbei bedeutet ⌊r⌋ = max{s ∈:s≤r}.<br />
Wir können den Suspensionsfluss statt für Diffeomorphismen einer Mannigfaltigkeit<br />
M auch für Diffeomorphismen einer offenen Menge U imÊn<br />
definieren. Allerdings ist auch in diesem Fall die Menge X, auf der der<br />
Suspensionsfluss definiert ist, keine Teilmenge desÊn × [0, 1] sondern eine<br />
abstrakte Mannigfaltigkeit.<br />
Beispiel 1.4.3.2 Wenn f : S 1 → S 1 eine Rotation ist, so ist X ein Torus.<br />
Beispiel 1.4.3.3 Wenn f : S 1 → S 1 eine Spiegelung ist, so ist X eine Klein-<br />
Flasche, eine nicht-orientierbare Mannigfaltigkeit (eine Fläche, deren ”<br />
Innenseite“<br />
gleichzeitig die ”<br />
Außenseite“ ist).<br />
Beispiel 1.4.3.4 Wenn f : (0, 1) → (0, 1) eine Spiegelung ist, so ist X ein<br />
Möbiusband.<br />
Beispiel 1.4.3.5 In unserem Beispiel mit den roten <strong>und</strong> blauen Ruhelagen auf<br />
der S 1 erhalten wir als Suspensionsfluss auf T 2 mit zwei periodischen Orbits <strong>und</strong><br />
einem heteroklinen Orbit, der die beiden verbindet.<br />
1.5 Aufgaben<br />
Aufgabe 1.5.0.6 Man überlege sich, ob ein Zerfallsgesetz u(t), welches der<br />
Beziehung (1.3) genügt, auch eine Gleichung der Form (1.1) erfüllt.<br />
Aufgabe 1.5.0.7 (a) Man begründe, dass jede Lösung der Gleichung<br />
du<br />
dx = u
1.5. AUFGABEN 39<br />
die Form Ce x mit einer reellen Konstante C hat.<br />
(b) Man gebe ein entsprechendes Argument für die Gleichung<br />
ϕ ′′ (t) = − g l ϕ(t)<br />
<strong>und</strong> die Lösungen A sin( √ ωt) + B cos( √ ωt) mit<br />
an.<br />
ω = g l<br />
Aufgabe 1.5.0.8 Man zeige, dass für das dynamische System auf [0, 1], das durch<br />
f(x) = 2x mod 1 gegeben ist, rationale Anfangswerte zu periodischen Orbits<br />
führen.<br />
Aufgabe 1.5.0.9 Man zeige, dass für das dynamische System auf [0, 1], das durch<br />
f(x) = x+b mod 1, gegeben ist, bei irrationalem b jeder Orbit dicht in [0, 1] liegt.<br />
Aufgabe 1.5.0.10 Man löse die Gleichungen<br />
(a) u ′ = u 2 + 1<br />
(b)<br />
u ′ = − x2<br />
u 3<br />
(c) u ′ = e u sin(x)<br />
mit der Methode der Trennung der Veränderlichen <strong>und</strong> diskutiere das Verhalten<br />
der Lösungen mit u(0) = p 0 , p 0 ∈Ê. Darunter verstehen wir die<br />
Beantwortung der folgenden Fragen.<br />
• Für welche t ∈Êexistiert die Lösung?<br />
• Wie verhält sich die Lösung für t → t + , t → t − , wenn (t − , t + ) das<br />
(maximale) Intervall bezeichnet, auf dem die Lösung u(t) existiert?<br />
Aufgabe 1.5.0.11 Man verifiziere die Aussagen über die logistische Gleichung:<br />
(a) Für p 0 ∈ (0, K) existiert die Lösung für alle Zeiten <strong>und</strong> strebt für t → ∞<br />
gegen K, für t → −∞ gegen Null.<br />
(b) Für p 0 > K existiert die Lösung nicht für alle reellen Zeiten. Man diskutiere<br />
das Verhalten.<br />
(c) Man untersuche das Verhalten der Lösungen für p 0 < 0!
40 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES<br />
Aufgabe 1.5.0.12 Man diskutiere das System<br />
w ′′<br />
v ′′<br />
= −Kw<br />
= −Kv<br />
für K < 0.<br />
Aufgabe 1.5.0.13 1. Beweisen Sie Satz 1.1.3.1<br />
2.<br />
Aufgabe 1.5.0.14 Man zeige, dass die Menge C([0, 1];Ên ) der stetigen Funktionen<br />
auf dem Intervall [0, 1] mit Werten imÊn , versehen mit der Norm<br />
ein Banachraum ist.<br />
‖u‖ = sup ‖u(x)‖Ên,<br />
x∈[0,1]<br />
Aufgabe 1.5.0.15 Wir betrachten die Abbildung<br />
T : C([0, 1];Ên ) → C([0, 1];Ên ) : u ↦→<br />
∫ 1<br />
0<br />
f(., y)u(y) dy, (1.13)<br />
wobei f eine auf [0, 1] × [0, 1] stetige, reellwertige Funktion ist. Man zeige,<br />
T ist stetig <strong>und</strong> linear. Ist T eine Kontraktion?<br />
Aufgabe 1.5.0.16 Man beweise das Lemma 1.2.2.3.<br />
Aufgabe 1.5.0.17 Man veranschauliche sich das Tangentialbündel an die<br />
Einheitssphäre imÊ2 . Wie sehen typische Vektorfelder aus? Wie hat man<br />
sich das entsprechende auf dem Torus T 2 vorzustellen.<br />
Aufgabe 1.5.0.18 Für die Folge {x n } n∈Æaus dem Beweis zum Banachschen<br />
Fixpunktsatz beweise man die Fehlerabschätzung<br />
d(x n+1 , x) ≤<br />
λn<br />
1 − λ d(x 1, x 0 ).<br />
Aufgabe 1.5.0.19 Man beweise Satz 1.3.1.12.
Kapitel 2<br />
Stabilität<br />
In diesem Kapitel beschränken wir uns auf diskrete dynamische <strong>Systeme</strong><br />
<strong>und</strong> wir wollen Aussagen über Stabilität von gewissen invarianten Mengen<br />
machen, indem wir linearisieren, d.h. eine im Allgemeinen nichtlineare<br />
Abbildung durtch die Linearisierung approximieren. Dazu muss der<br />
Zustandsraum das Konzept der Linearisierung zulassen. Wir betrachten<br />
daher als Zustandsraum eine offene Menge imÊn oder eine Mannigfaltigkeit.<br />
Gr<strong>und</strong>legend ist dabei ein kurzer Blick auf lineare <strong>Systeme</strong> imÊn .<br />
2.1 Lineare <strong>Systeme</strong><br />
Im folgenden sei X =Ên der Zustandsraum, A sei eine lineare Abbildung<br />
A : X → X,Ì=oderÌ=Æ. Wir betrachten das dynamische System<br />
(X, A). Ist A injektiv, wählen wirÌ=, im anderen Fall istÌ=Æ. Mit<br />
σ(A) bezeichnen wir das Spektrum von A. Ist λ ∈ σ(A) so sei E(λ) der<br />
verallgemeinerte Eigenraum von A zum Eigenwert λ, d.h.<br />
Entsprechend sei<br />
E(λ) =<br />
{<br />
x ∈ X<br />
}<br />
∣ ∃ r∈Æ(A − λ1l) r x = 0 .<br />
K(λ) = ker(A − λ1l)<br />
der Eigenraum zum Eigenwert λ. Wir notieren das triviale Lemma:<br />
Lemma 2.1.0.20 (Invarianz der Eigenräume) Die Räume E(λ), K(λ) sind<br />
innvariante Mengen für (X, A).<br />
41
42 KAPITEL 2. STABILITÄT<br />
Beweis. Für x ∈ E(λ) gilt mit r, so dass (A − λ1l) r x = 0<br />
(A −λ1l) r Ax = (A −λ1l) r (A −λ1l+λ1l)x = (A −λ1l) r+1 x+λ(A −λ1l) r x = 0.<br />
Lemma 2.1.0.21 (Asymptotik in den Eigenräumen) 1. Ist |λ| < 1 <strong>und</strong><br />
x ∈ E(λ), so gilt<br />
lim<br />
k→∞ Ak x = 0.<br />
2. Ist |λ| > 1, so ist für 0 ≠ x ∈ E(λ) die Folge {A r } r∈Æx unbeschränkt. Die<br />
Folge wächst wie |λ| r .<br />
3. Ist λ| = 1, so gilt 0 ≠ x ∈ K(λ), dass<br />
{A r x} r∈Æ<br />
eine beschränkte, von Null wegbeschränkte Folge ist mit<br />
‖A r x‖ = ‖x‖<br />
für alle r ∈Æ<strong>und</strong> eine geeignete Norm auf V .<br />
4. Ist |λ| = 1 <strong>und</strong> x ∈ E(λ) \ K(λ) so ist {A r x} r∈Æunbeschränkt, die Folge<br />
wächst polynomial in r.<br />
Beweis.<br />
1. Ist x ∈ K(λ) so ist A k x = λ k x → 0 für k → ∞. Im allgemeinen Fall<br />
schreiben wir die Einschränkung auf E(λ) in der Form A = D + N,<br />
wobei D = λ1l <strong>und</strong> N nilpotent ist, d.h. es existiert ein m ∈Æmit<br />
N m = 0. Dann ist<br />
A r = (D + N) r =<br />
Dann sieht man leicht, dass<br />
m−1<br />
∑<br />
j=1<br />
lim<br />
r→∞ Ar x = 0.<br />
( r<br />
j)<br />
D r−j N j .
2.2. LINEARE EBENE SYSTEME 43<br />
2. Der Beweis für den Fall |λ| > 1 folgt dem vorigen <strong>und</strong> braucht keine<br />
neuen Argumente.<br />
3. Ist |λ| = 1, <strong>und</strong> Vder komplexifixierte Raum, so ist für x ∈ K(Λ)<br />
A r x = λ r x<br />
<strong>und</strong> damit ist<br />
‖A r x‖ = ‖λ r x‖ = |λ| r ‖x‖ = ‖x‖.<br />
2.2 Lineare ebene <strong>Systeme</strong><br />
Ein ebenes lineares diskretes System hat die Form<br />
x n+1 = Bx<br />
wobei x i ∈Ê2 <strong>und</strong> B ∈ L(Ê2 ,Ê2 ) ist. Wir unterscheiden mehrere Fälle: B<br />
hat Eigenwerte λ 1 , λ 2 mit<br />
1. |λ 1,2 | < 1<br />
2. |λ 1 | < 1, |λ 2 | = 1<br />
3. |λ 1 | < 1, |λ 2 | > 1<br />
4. |λ 1,2 | = 1<br />
5. |λ 1 | = 1, |λ 2 | > 1<br />
6. |λ 1,2 | > 1<br />
In den Fällen mit mindestens einem Eigenwert vom Betrag < 1 ist die Matrix<br />
eventuell nicht invertierbar <strong>und</strong> wir müssen die Fälle in denen mindestens<br />
ein Eigenwert 0 auftritt, getrennt betrachten.
44 KAPITEL 2. STABILITÄT<br />
2.2.1 |λ 1,2 | < 1<br />
Doppelter Eigenwert 0<br />
Ist B = 0, so ist die Dynamik trivial: in einem Iterationsschritt landen wir<br />
in 0 <strong>und</strong> bleiben dort.<br />
Ist B ≠ 1, so hat die Jordan-Form von B die Gestalt<br />
B =<br />
(<br />
0 1<br />
0 0<br />
)<br />
Ein Punkt der Form<br />
x =<br />
(<br />
x1<br />
x 2<br />
)<br />
wird auf<br />
(<br />
x2<br />
0<br />
)<br />
abgebildet <strong>und</strong> im nächsten Schritt auf die 0. Auch eine recht einfache<br />
Dynamik.<br />
Ein Eigenwert 0<br />
Nun kann B diagonalisiert werden, wir reduzieren in einem Schritt die<br />
Dynamik in eine eindimensionale Situation. Dort konvergiert die Folge<br />
gegen 0.<br />
0 < |λ 1 | < |λ 2 | < 1<br />
Hier könnten wir die Fälle ob die Eigenwerte gleiches oder ungleiches Vorzeichen<br />
haben unterscheiden.<br />
Im beiden Fällen gibt es die eindimensionalen Eigenräume E(λ i ) die invariant<br />
unter der Dynamik sind. In beiden Unterräumen konvergieren die<br />
Folgen gegen 0 mit Raten |λ i | n .
2.3. STABILITÄT VON RUHELAGEN 45<br />
2.2.2 Ein Eigenwert vom Betrag höchstens 1, mindestens<br />
ein Eigenwert von Betrag 1<br />
Ein Eigenwert 0, ein Eigenwert vom Betrag 1<br />
In diesem Fall sind beide Eigenwerte einfach, <strong>und</strong> es gibt die zwei Möglichkeiten<br />
für die Jordanform<br />
( ) ( )<br />
0 0 0 0<br />
oder<br />
0 1 0 −1<br />
In einem Schritt erreicht man den Eigenraum zum Eigenwert vom Betrag<br />
1, in einem Fall ist dieser gefüllt mit Ruhelagen, im anderen mit periodischen<br />
Orbits der Länge 2.<br />
Ein Eigenwert 0 < |λ| < 1, ein Eigenwert vom Betrag 1<br />
Der Eigenwert vom Betrag 1 ist entweder 1 oder −1. Hier hat man Konvergenz<br />
gegen eine Familie von Ruhelagen, oder gegen eine Familie periodischer<br />
Orbits der Länge 2.<br />
Zwei Eigenwerte vom Betrag 1<br />
Hier sind die einfachen Fälle aus Kombination von zwei reellen Eigenwerten<br />
±1 denkbar, bei geichen Eigewerten geometrisch doppelt, oder geometrisch<br />
einfach. Allerdings gibt es auch den Fall von einem Paar konjugiert<br />
komplexer Eigenwerte, entweder Einheitswurzeln λ p = 1, p ∈oder keine<br />
Einheitswurzeln. Die ersten Fälle mit Eigenwerten λ 1,2 = ±1 λ 1 λ 2 = −1<br />
führen auf periodische Orbits der Länge 2, zwei gleiche Eigenwerte mit<br />
geometrisch doppelten Eigenwerten führen ebenfalls auf Ruhelagen oder<br />
periodische Orbits, sind aber keine stabilen Situationen. Im Fall von geometrisch<br />
einfachen, algebraisch doppelten Eigenwerten ±1 hat man polynomiale<br />
Divergenz.<br />
2.3 Stabilität von Ruhelagen<br />
Wir betrachten nun die Situation einer nichtlinearen Abbildung f : U →<br />
U, wobei U ⊂Ên offen ist. Die Situation einer offenen Teilmenge einer
46 KAPITEL 2. STABILITÄT<br />
Mannigfaltigkeit M wird ganz entsprechend behandelt. Wir nehmen an,<br />
x 0 ∈ U sei eine Ruhelage von f, also f(x 0 ) = x 0 . Wir nehmen an, f sei<br />
stetig differenzierbar <strong>und</strong> A = D x f(x 0 ). OBdA dürfen wir annehmen, dass<br />
x 0 = 0 ist, indem wir<br />
f 1 (x) = f(x + x 0 ) − x 0<br />
setzen, dann ist<br />
f 1 (0) = f(x 0 ) − x 0 = 0<br />
<strong>und</strong> D x f 1 (0) = D x f(x 0 ). Es sei g = f − A <strong>und</strong> damit gilt<br />
Dg(x 0 ) = 0<br />
<strong>und</strong> zu jedem ε > 0 <strong>und</strong> zu jeder Norm auf L(Ên ;Ên ) gibt es eine Umgebung<br />
V von 0 mit<br />
‖Dg(y)‖ L(Ên ) < ε<br />
für y ∈ V .<br />
Definition 2.3.0.1 (Stabilität von Ruhelagen) 1. Eine Ruhelage heißt stabil,<br />
wenn sie als kompakte invariante Menge stabil ist.<br />
2. Sie wird als asymptotisch stabil bezeichnet, wenn sie als invariante Menge<br />
ein Attraktor ist.<br />
3. Ist die Ruhelage nicht stabil, so bezeichnen wir sie als instabil.<br />
Satz 2.3.0.2 (Stabilität von Ruhelagen) Es sei 0 ∈ U ⊂Ên }<br />
offen, f ∈ C 1 (U; U)<br />
∣∣<br />
mit A = D x f(0). Dann gilt: Ist σ(A) ⊂<br />
{z ∈∣ |z| < 1 , dann ist 0 asymptotisch<br />
stabil.<br />
Beweis. Der Spektralradius ρ(A) < s < 1. Daher gibt es eine Norm, mit<br />
zugehöriger Operatornorm, so dass<br />
‖A‖ L(Ên ,Ên ) < s.<br />
Ist ε < 1 − s, so ist auf V , ‖Df‖ < k < 1. Dann ist für x ∈ B δ (0) ⊂ V<br />
‖f(x) − f(0)‖ ≤ ‖Df(ξ)‖ L(Ên ;Ên )‖x‖ ≤ k‖x‖ < δ.<br />
Somit ist 0 stabil, <strong>und</strong> das gleiche Argument zeigt, dass 0 attraktiv ist.
2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITÄT 47<br />
Satz 2.3.0.3 (Störungssatz) Ist f :Ên →Ên stetig differenzierbar auf einer<br />
Umgebung W eines Fixpunktes x 0 <strong>und</strong> ist ‖Df(x 0 )‖ < 1, so gibt es eine abgeschlossene<br />
Umgebung U von x 0 , so dass f(U) ⊂ U <strong>und</strong> f ist Kontraktion auf U.<br />
Ferner ist jede hinreichend nahe an f in gelegene Abbildung g : U → U (f, g nahe<br />
in C 1 (U; U)), dass g auf U eine Kontraktion ist (<strong>und</strong> damit einen asymptotisch<br />
stabilen Fixpunkt besitzt).<br />
Wir erhalten dafür einen zweiten Stabilitätsbegriff: (U, f) ist als System stabil<br />
(gegen Störungen). Dieser Begriff spielt in der Theorie dynamischer<br />
<strong>Systeme</strong> eine sehr große Rolle.<br />
2.4 Lineare <strong>Differentialgleichungen</strong> <strong>und</strong> Stabilität<br />
2.4.1 Jordan Form<br />
In diesem kurzen Abschnitt wiederholen wir einige Begriffe der linearen<br />
Algebra. Sei A :Ên →Ên eine lineare Abbildung mit zugehöriger Matrix<br />
A (diese wird durch die Wahl einer Basis bestimmt). Wir gehen immer von<br />
der kanonischen Basis aus <strong>und</strong> identifizieren auf diese Weise die lineare<br />
Abbildung mit der Matrix. Eine Zahl λ ∈heißt Eigenwert von A, wenn<br />
es einen Vektor u c ∈n gibt mit<br />
Au c = λu c .<br />
Dieser Vektor u c wird Eigenvektor genannt. Natürlich müssen wir auch bei<br />
reellen Matrizen komplexe Eigenwerte <strong>und</strong> Eigenvektoren zulassen. Deshalb<br />
arbeiten wir zunächst im komplexifizierten Raumn . Die Eigenwerte<br />
sind Lösungen der charakteristischen Gleichung<br />
det(A − λ1l) = 0. (2.1)<br />
Wegen des F<strong>und</strong>amentalsatzes der Algebra gibt es (mit Vielfachheiten gerechnet)<br />
genau n Wurzeln dieser Gleichung. Jede Wurzel von (2.1) ist auch<br />
Eigenwert, jedoch gibt es im allgemeinen weniger als n Eigenvektoren. Sei<br />
λ ein Eigenwert, so ist<br />
K λ = ker(A − λ1l)
48 KAPITEL 2. STABILITÄT<br />
ein A-invarianter Unterraum, der Eigenraum von A zum Eigenwert λ. Sei<br />
m die Dimension von K λ . K λ ist enthalten im verallgemeinerten Eigenraum,<br />
der gegeben ist durch<br />
E λ = {u ∈n | ∃k ∈Æmit (A − λ1l) k u = 0}.<br />
Der verallgemeinerte Eigenraum E λ zum Eigenwert λ ist invariant unter<br />
der Abbildung A. Eine weitere Zerlegung in invariante Unterräume ist<br />
möglich. Dazu betrachtet man den minimalen Wert k 0 , so dass ker(A −<br />
λ1l) k 0<br />
= E λ ist. So eine Zahl existiert immer. In E λ existiert eine Basis B,<br />
welches die Vereinigung von m Mengen H 1 , . . .,H m ist, wobei jedes H k die<br />
Form<br />
H k = {u k,1 , . . .,u k,rk } (2.2)<br />
hat mit<br />
(A − λ1l)u k,i+1 = u k,i , i = 1, . . .,r k , (A − λ1l)u k,1 = 0.<br />
Die Einschränkung von A auf E λ hat in der Basis B dann die Gestalt<br />
⎛<br />
⎞<br />
B 1 0 . . . . . . 0<br />
0 B 2 0 . . . 0<br />
.<br />
⎜<br />
. .. . .. . .. .<br />
, (2.3)<br />
⎟<br />
⎝ 0 . . . 0 0 ⎠<br />
0 . . . . . . 0 B m<br />
wobei jeder dieser r k × r k Blöcke B k die einfache Form<br />
⎛<br />
⎞<br />
λ 1 0 . . . . . . 0<br />
0 λ 1 0<br />
.. . 0<br />
.<br />
.. .<br />
.. .<br />
.. .<br />
.. . .<br />
B k =<br />
.<br />
.. .<br />
.. .<br />
.. . 0<br />
⎜<br />
⎝ .<br />
..<br />
⎟<br />
. λ 1 ⎠<br />
0 . . . . . . . . . 0 λ<br />
(2.4)<br />
hat. Damit haben wir die komplexe Jordansche 1 Normalform einer Matrix<br />
erhalten. In der reellen Jordanschen Normalform hat man auch eine Dar-<br />
1 Camille Marie Ennemond Jordan (5.1.1838-21.1.1922) wurde zunächst zum Bergbauingenieur<br />
ausgebildet. Im Jahre 1916 wurde er Präsident der französischen Akademie der<br />
Wissenschaften. Sein Werk umfasst neben der Normalform Beiträge zur Algebra (u.a. zur<br />
Galois-Theorie), zur Analysis, zur Wahrscheinlichkeitsrechnung <strong>und</strong> zur Topologie der<br />
Ebene (Kurvensatz).
2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITÄT 49<br />
stellung in Blöcken wie in (2.3), jedoch sehen die Blöcke i.a. anders aus. Ist<br />
λ reell so bleibt die Form (2.4) erhalten. Für komplexe Eigenwerte λ = e iα ,<br />
ergibt sich statt (2.4) die Form<br />
⎛<br />
B k =<br />
⎜<br />
⎝<br />
cosα − sin α 1 0 . . . . . . . . . 0<br />
sin α cosα 0 1 0 . . . . . . 0<br />
0 0 cosα − sin α 1 0 . . . 0<br />
0 0 sin α cosα 0 1 . . . 0<br />
. .<br />
. .. . .. . .. . .. . .. .<br />
.<br />
. .. . .. . .. 1 0<br />
.<br />
. .. . .. 0 1<br />
0 . . . . . . . . . . . . 0 cosα − sin α<br />
0 . . . . . . . . . . . . 0 sin α cosα<br />
⎞<br />
. (2.5)<br />
⎟<br />
⎠<br />
Eine einfache Begründung für diese Form ergibt sich aus der komplexen<br />
Jordanschen Normalform <strong>und</strong> der folgenden Überlegung. Ist λ ∈ein<br />
komplexer Eigenwert einer reellen Matrix so ist ¯λ ebenso ein Eigenwert<br />
<strong>und</strong> es gibt zu dem zur Menge aus Gleichung 2.2 H k = {u k,1 , . . .,u k,rk }<br />
eine Menge H ∗ k = {u k,1, . . .,u k,rk } konjugiert komplexer Vektoren die eine<br />
entsprechende Basis zum Eigenwert ¯λ bilden. Wir definieren nun ein Paar<br />
reeller Vektoren<br />
v k,j<br />
Nun sehen wir leicht<br />
= 1 2 (u k,j + u k,j ), j = 1, . . ., r k<br />
w k,j = 1<br />
2i (u k,j − u k,j ), j = 1, . . ., r k .<br />
Av k,j = 1 2 (Au k,j + Au k,j )<br />
( ) ( )<br />
cos(α) − sin(α) vk,j<br />
= v k,j−1 +<br />
.<br />
sin(α) cos(α) w k,j<br />
Für Aw k,j ergibt eine ähnliche Rechnung ein ganz ähnliches Ergebnis. Für<br />
die Basis, die immer aus Paaren<br />
HÊk = {v k,1 , w k,1 , . . .,v k,rk , w k,rk }<br />
besteht ergibt sich dann die obige Abbildungsmatrix.<br />
Wie sieht der Block für λ = |λ|e iα aus?
50 KAPITEL 2. STABILITÄT<br />
2.4.2 Die Matrixexponentialfunktion<br />
Definition 2.4.2.1 Sei A ∈ L(Ên ,Ên ). Wir setzen ‖A‖ = sup { |Au| ∣ ∣ u ∈<br />
Ên , |u| = 1 } .<br />
Lemma 2.4.2.2 ‖ · ‖ ist eine Norm auf dem linearen Raum der linearen Abbildungen<br />
vonÊn in sich. Außerdem gilt ‖AB‖ ≤ ‖A‖‖B‖.<br />
Beweis. Einfaches Nachrechnen!<br />
Definition 2.4.2.3 Sei A eine n ×n-Matrix. Die Funktion E :Ê→L(Ên,Ên )<br />
sei definiert durch<br />
∞∑ t k<br />
E(A, t) =<br />
k! Ak . (2.6)<br />
Wir nennen E(A, t) die Matrixexponentialfunktion <strong>und</strong> schreiben dafür auch<br />
k=0<br />
E(A, t) = e At .<br />
Lemma 2.4.2.4 Die Funktion E(A, t) ist für jedes A ∈ L(Ên ,Ên ) <strong>und</strong> jede<br />
reelle Zahl t ∈Êdefiniert.<br />
Beweis. Übungsaufgabe!<br />
Satz 2.4.2.5 Die Matrixexponentialfunktion E(A, t) löst das Anfangswertproblem<br />
(??)<br />
Ċ = AC, C(0) = 1l<br />
aus Hilfssatz ??.<br />
Beweis. Zunächst betrachten wir eine Teilsumme der Reihe E(A, t)<br />
m∑ t k<br />
E m (A, t) =<br />
k! Ak .<br />
k=0<br />
Die Ableitung von E m (A, t) ist natürlich<br />
m∑ t k−1<br />
Ė m (A, t) =<br />
(k − 1)! Ak = AE m−1 (A, t).<br />
k=1<br />
Wegen der gleichmäßigen Konvergenz der rechten Seite (auf kompakten<br />
Teilmengen vonÊ) ist E(A, t) differenzierbar <strong>und</strong> Ė(A, t) = AE(A, t).<br />
Natürlich ist auch E(A, 0) = 1l.<br />
Die Lösung des Anfangswertproblems ˙u = Au, u(0) = u 0 erhält man<br />
also durch u(t, u 0 ) = E(A, t)u 0 .
∈Ê<br />
2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITÄT 51<br />
Hilfssatz 2.4.2.6 Kommutieren die beiden Matrizen A, B miteinander, d.h.<br />
ist AB = BA, folgt für alle t<br />
BE(A, t) = E(A, t)B,<br />
<strong>und</strong> es gilt<br />
E(A + B, t) = E(A, t)E(B, t) = E(B, t)E(A, t) ∀t ∈Ê.<br />
Beweis. Die erste Eigenschaft ist eine unmittelbare Konsequenz der Definition,<br />
die zweite erhält man aus dem Eindeutigkeitssatz für die Lösung<br />
von Anfangswertproblemen, indem man nachprüft, dass E(A + B, t) <strong>und</strong><br />
E(A, t)E(B, t) das gleiche Anfangswertproblem lösen.<br />
A kann durch eine Ähnlichkeitstransformation in die Jordansche Normalform<br />
gebracht werden. Sei J die Jordansche Normalform von A <strong>und</strong><br />
C die Transformationsmatrix, also J = CAC −1 . Die allgemeine Form des<br />
Verhaltens der Lösungen unter Koordinatentransformation ist in Aufgabe<br />
20, Blatt 5 angegeben. Für den Spezialfall können wir die Lösung des Ausgangsproblems<br />
gewinnen, indem wir A in die Jordansche Normalform<br />
überführen, für diese dann die Gleichung lösen <strong>und</strong> zurücktransformieren.<br />
Wir erhalten<br />
u(t, u 0 ) = E(A, t)u 0 = C −1 v(t, Cu 0 ) = C −1 E(J, t)Cu 0 .<br />
Aus der Eindeutigkeit der Lösung folgt noch<br />
E(A, t) = C −1 E(CAC −1 , t)C.<br />
Natürlich kann man diese Formel auch unmittelbar aus der Definition von<br />
E(A, t) schließen. Zur allgemeinen Lösung linearer Anfangswertprobleme<br />
müssen wir noch E(J, t) ausrechnen. Wir gehen von der Gestalt (2.3) aus.<br />
Natürlich gilt für eine Matrix J in Blockdiagonalgestalt<br />
J = diag(B 1 , . . .,B m )),<br />
dass die Matrixexponentialfunktion auch Blockdiagonalgestalt annimmt,<br />
also<br />
E(J, t) = diag(E(B 1 , t), . . .,E(B m , t)).<br />
Ist B ein Block der Länge 1, also B = (λ), so ist natürlich E(B, t) = e λt . Ist B<br />
ein Block der Länge r > 1 <strong>und</strong> der zugehörige Eigenwert λ reell, so ergibt<br />
sich die Exponentialreihe aus folgenden Betrachtungen.
52 KAPITEL 2. STABILITÄT<br />
Definition 2.4.2.7 Eine Matrix N heißt nilpotent, wenn es ein r ∈Ægibt mit<br />
N r = 0.<br />
Lemma 2.4.2.8 Ein Block der Gestalt (2.4) ist die Summe einer Diagonalmatrix<br />
D <strong>und</strong> einer nilpotenten Matrix N.<br />
Beweis. Natürlich ist D = diag(λ, . . .,λ). Übrig bleibt die r × r Matrix<br />
⎛<br />
⎞<br />
0 1 0 . . . . . . 0<br />
.<br />
0 0 1 0 .. 0<br />
. . .. . .. . .. . .. .<br />
N =<br />
. . .. . .. . . (2.7)<br />
.. 0<br />
⎜<br />
⎝<br />
. ⎟<br />
.<br />
.. 0 1 ⎠<br />
0 . . . . . . . . . 0 0<br />
Eine einfache Rechnung zeigt, dass N r = 0 ist. Damit ist N nilpotent.<br />
Bemerkung 2.4.2.9 Genauer gilt, dass jede Matrix A Summe einer diagonalisierbaren<br />
<strong>und</strong> einer nilpotenten Matrix ist. Unser Beweis zeigt dies zumindest<br />
für reelle Matrizen mit ausschließlich reellen Eigenwerten.<br />
Lemma 2.4.2.10 Die Matrixexponentialfunktion E(B, t) eines Jordan-Blocks der<br />
Länge r zum Eigenwert λ hat die Gestalt<br />
⎛<br />
⎞<br />
1 t t 2 /2 t 3 t<br />
/6 . . . r−1<br />
(r−1)!<br />
. 0 1 t .. . .. .<br />
.<br />
E(B, t) = e λt . .. . .. . .. . .. t 3 /6<br />
(2.8)<br />
. . .. . .. . .. t 2 /2<br />
⎜<br />
⎝<br />
. ⎟<br />
.<br />
.. 1 t ⎠<br />
0 . . . . . . . . . 0 1<br />
Beweis. Es gilt DN = ND <strong>und</strong> daher mit dem Hilfssatz 2.4.2.6<br />
E(B, t) = E(D + N, t) = E(D, t)E(N, t).<br />
Nun ergibt E(D, t) = e λt 1l <strong>und</strong> da N nilpotent ist, hat man<br />
E(N, t) = 1l + tN + t2 2 N2 + · · · +<br />
tr−1<br />
(r − 1)! Nr−1 .
2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITÄT 53<br />
Für einen nichtreellen Eigenwert stellt man die gleiche Betrachtung im<br />
Komplexen an <strong>und</strong> schneidet den Lösungsraum mit demÊn . Wir wollen<br />
die entsprechende Formel im Moment nicht angeben.<br />
Satz 2.4.2.11 (Algebraische Struktur des Lösungsraumes I) Sei A ∈ L(Ên ,Ên ).Wir<br />
setzen U = {u ∈ C 1 (Ê,Ên ) | ˙u = Au}. U ist ein linearer Raum. Die Dimension<br />
von U ist n.<br />
Beweis. Offensichtlich ist die Summe zweier Lösungen wieder eine Lösung.<br />
Gleiches gilt für das Produkt ξu mit ξ ∈Ê<strong>und</strong> u ∈ U. Also bleibt zu zeigen,<br />
dass dim U = n ist. Sei A : U →Ên die Abbildung Au = u(0). Offensichtlich<br />
ist A linear <strong>und</strong> wegen der eindeutigen Lösbarkeit von Anfangswertproblemen<br />
injektiv. Wegen des globalen Existenzsatzes ist A surjektiv.<br />
Also gilt U ≃Ên .<br />
Als nächsten Schritt betrachten wir die inhomogene lineare Gleichung,<br />
gegeben durch<br />
˙u = Au + f(t), (2.9)<br />
wobei f :Ê→Ên eine stetige Abbildung ist. Wir wissen, aufgr<strong>und</strong><br />
des Existenzsatzes, dass diese Gleichung bei Vorgabe eines Anfangswertes<br />
lösbar ist. Die algebraische Struktur ist natürlich etwas anders als vorher.<br />
Wie in der linearen Algebra besteht die allgemeine Lösung aus einer speziellen<br />
Lösung plus einem beliebigen Element aus U.<br />
Satz 2.4.2.12 (Algebraische Struktur des Lösungsraumes II) Sei<br />
U f = {u ∈ C 1 (Ê,Ên ) | ˙u = Au + f(t)}.<br />
U f ist ein n-dimensionaler affiner Unterraum von C 1 (Ê,Ên ). Es existiert also<br />
ein u 0 ∈ C 1 (Ê,Ên ) mit der Eigenschaft, dass<br />
U f = {u 0 + u | u ∈ U}.<br />
Beweis. Wie schon bemerkt, hat die Gleichung (2.9) immer eine Lösung.<br />
Sei u 0 eine solche Lösung. Dann ist natürlich für u ∈ U auch u 0 + u eine<br />
Lösung. Wir müssen noch zeigen, dass jede Lösung diese Form hat. Sei u 1<br />
eine weitere Lösung der Gleichung (2.9). Dann ist u 0 − u 1 eine Lösung der<br />
homogenen linearen Gleichung (einfaches Nachprüfen zeigt dies). Damit<br />
ist u 0 − u 1 ∈ U.<br />
Wir wollen uns noch kurz Gedanken machen, wie man eine spezielle<br />
Lösung u 0 findet.
54 KAPITEL 2. STABILITÄT<br />
Lemma 2.4.2.13 (Formel der Variation der Konstanten) Sei A ∈ L(Ên ,Ên ),<br />
f :Ê→Ên stetig. Sei u 0 ∈Ên . Dann ist eine spezielle Lösung der Gleichung<br />
˙u = Au + f(t) gegeben durch<br />
u 0 (t) = e At u 0 +<br />
Beweis. Differenzieren ergibt<br />
also<br />
∫ t<br />
0<br />
e A(t−s) f(s)ds. (2.10)<br />
∫<br />
d<br />
t<br />
dt u0 (t) = Ae At u 0 + [e A(t−s) d<br />
f(s)] |s=t +<br />
0 dt eA(t−s) f(s)ds,<br />
d<br />
dt u0 (t) = Ae At u 0 + f(t) + A<br />
∫ t<br />
0<br />
e A(t−s) f(s)ds = Au + f(t).<br />
2.4.3 Ebene lineare <strong>Systeme</strong><br />
In diesem Abschnitt wollen wir ebene, lineare <strong>und</strong> autonome <strong>Systeme</strong> charakterisieren.<br />
Wir betrachten also eine Gleichung der Form<br />
˙u = Au, (2.11)<br />
wobei A ∈ L(Ê2 ,Ê2 ) eine lineare Abbildung ist. Seien λ 1 , λ 2 die Eigenwerte<br />
von A. Wir unterscheiden:<br />
1. λ 1 > λ 2 > 0;<br />
2. λ 1 = λ 2 > 0;<br />
3. λ 1 = λ 2 , Reλ 1 > 0;<br />
4. λ 1 > λ 2 = 0;<br />
5. λ 1 = λ 2 = 0;<br />
6. Reλ 1 = Reλ 2 = 0, λ i ≠ 0;<br />
7. λ 1 > 0 > λ 2 ;
2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITÄT 55<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
−1<br />
−2<br />
−3<br />
−4<br />
−5<br />
−5 −4 −3 −2 −1 0 1 2 3 4 5<br />
Abbildung 2.1: Die Trajektorien von E(J, t).<br />
8. λ 1 = λ 2 < 0;<br />
9. λ 1 < λ 2 < 0;<br />
10. λ 1 = λ 2 , Reλ 1 < 0;<br />
11. λ 1 < λ 2 = 0.<br />
1. Fall: Dabei hat die Jordan Normalform die Gestalt<br />
( )<br />
λ1 0<br />
J =<br />
0 λ 2<br />
(2.12)<br />
Seien e 1 , e 2 die Eigenvektoren zu λ 1,2 . Dann konvergieren alle Lösungen<br />
für t → −∞ gegen Null, für t → ∞ verlassen alle Lösungen (außer einer!)<br />
jedes Kompaktum. Sie schmiegen sich (für t → −∞) an die e 2 -Achse an.<br />
2. Fall: Wir unterscheiden zwei mögliche Formen des Jordan Blocks (Eigenwerte<br />
sind geometrisch einfach oder nicht). Zunächst der Fall der geometrisch<br />
einfachen Eigenwerte. Hier hat der entsprechende Jordanblock<br />
die Form<br />
( )<br />
λ1 0<br />
J = . (2.13)<br />
0 λ 1<br />
Alle Lösungen haben dieselben Konvergenzeigenschaften wie zuvor. Nur<br />
ist die Bewegung längs gerader Linien.<br />
Ist der Eigenwert nicht geometrisch einfach, so hat der Jordanblock die<br />
Gestalt<br />
( )<br />
λ1 1<br />
J = . (2.14)<br />
0 λ 1
56 KAPITEL 2. STABILITÄT<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
−1<br />
−2<br />
−3<br />
−4<br />
−5<br />
−5 −4 −3 −2 −1 0 1 2 3 4 5<br />
Abbildung 2.2: Die Trajektorien von E(A, t) mit schiefliegenden Eigenräumen.<br />
15<br />
10<br />
5<br />
0<br />
−5<br />
−10<br />
−15<br />
−15 −10 −5 0 5 10 15<br />
Abbildung 2.3: Die Trajektorien von E(J, t) mit halbeinfachen Eigenwerten.
2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITÄT 57<br />
15<br />
10<br />
5<br />
0<br />
−5<br />
−10<br />
−15<br />
−15 −10 −5 0 5 10 15<br />
Abbildung 2.4: Die Trajektorien von E(J, t) mit geometrisch einfachem,<br />
algebraisch doppelten Eigenwert.<br />
Auch hier hat man die Konvergenzeigenschaften wie im ersten Fall, jedoch<br />
schaut das Bild wiederum anders aus.<br />
3. Fall: Wieder ergibt sich die gleiche Konvergenz, jedoch erhält man<br />
einen Strudel. Sei λ 1 = |λ|e iθ . Dann ist λ 2 = |λ|e −iθ <strong>und</strong> die reelle Normalform<br />
hat die Form<br />
( cos θ − sin θ<br />
J = |λ|<br />
sin θ cos θ<br />
4. Fall: Für die Jordan Form ergibt sich<br />
J =<br />
(<br />
λ1 0<br />
0 0<br />
)<br />
. (2.15)<br />
)<br />
. (2.16)<br />
Längs der e 2 -Achse hat man konstante Lösungen (Ruhelagen). Alle anderen<br />
Lösungen konvergieren für t → −∞ gegen 0 <strong>und</strong> verlassen in positiver<br />
Zeitrichtung jedes Kompaktum.<br />
5. Fall: In diesem Fall hat die Jordan Form das Aussehen<br />
J =<br />
(<br />
0 0<br />
0 0<br />
)<br />
(2.17)<br />
oder<br />
J =<br />
(<br />
0 1<br />
0 0<br />
)<br />
. (2.18)
58 KAPITEL 2. STABILITÄT<br />
Der erste dieser beiden Fälle liefert ausschließlich konstante Lösungen. Im<br />
zweiten hat man eine Bewegung auf Parallelen zur e 1 -Achse gegen unendlich.<br />
6. Fall: Unsere Abbildung erhält die Gestalt<br />
(<br />
cos θ − sin θ<br />
J =<br />
sin θ cosθ<br />
)<br />
. (2.19)<br />
Wir erhalten Lösungen, die sich auf Kreislinien um den Ursprung bewegen.<br />
7. Fall: Ein qualitativ neues Bild ergibt sich hier. Auf der einen Achse bewegt<br />
man sich für t → ∞ gegen unendlich <strong>und</strong> für t → −∞ gegen Null,<br />
auf der anderen Achse hat man das gegenteilige Verhalten. Dazwischen<br />
sind Lösungen, die für beide Zeitrichtungen jedes Kompaktum verlassen<br />
<strong>und</strong> sich für t → ±∞ an die jeweilige Eigenwertachse anschmiegen. (Dies<br />
ist die Motivation für den Begriff hyperbolisch, den wir noch einführen werden.)<br />
In den anderen Fällen ergeben sich ganz ähnliche Bilder wie bisher, nur<br />
die Zeitrichtungen sind anders. Wir geben nur die Normalformen <strong>und</strong> die<br />
Bilder, keine weiteren Kommentare.<br />
( )<br />
λ1 0<br />
J =<br />
(2.20)<br />
0 λ 2<br />
8. Fall:<br />
J =<br />
( )<br />
λ1 0<br />
0 λ 1<br />
(2.21)<br />
oder<br />
J =<br />
( )<br />
λ1 1<br />
0 λ 1<br />
(2.22)<br />
9. Fall:<br />
J =<br />
( )<br />
λ1 0<br />
0 λ 2<br />
(2.23)<br />
10. Fall:<br />
(<br />
cos θ − sin θ<br />
J =<br />
sin θ cos θ<br />
)<br />
(2.24)
2.5. NEWTONS METHODE ALS DYNAMISCHES SYSTEM 59<br />
11. Fall:<br />
J =<br />
(<br />
λ1 0<br />
0 0<br />
)<br />
(2.25)<br />
2.5 Newtons Methode als dynamisches System<br />
Numerische methoden zur Lösung eines (nichtlinearen) Gleichungssystems<br />
f(z) = 0.<br />
Iterationsvorschrift<br />
Fixpunkte diser Gleichung lösen<br />
<strong>und</strong> damit<br />
x 1 = x 0 − Df(x 0 ) −1 f(x 0 ).<br />
x 0 = x 0 − Df(x 0 ) −1 f(x 0 )<br />
f(x 0 ) = 0.<br />
Ein Fixpunkt einer Iteration F heißt superattraktiv, falls DF(x 0 ) = 0. Als<br />
Abbildung F erhalten wir<br />
Nun ergibt sich<br />
F(x) = x − Df(x) −1 f(x).<br />
DF(x 0 ) = 1l − (Df(x 0 ) −1 ) 2 (Df(x 0 ) 2 − D 2 f(x 0 )f(x 0 )) = 0.<br />
Also ist der Fixpunkt super-attraktiv <strong>und</strong> die Konvergenz gegen den Fixpunkt<br />
ist quadratisch.<br />
Allerdings ist das globale Verhalten sehr viel komplizierter: sucht man<br />
nach den komplexen Nullstellen von einfachen Gleichungen wie z 3 = 1,<br />
so sieht man, dass die Einzugsgebiete der einzelnen Lösungen, d.h. die<br />
Gebiete ω(z) = z i auf komplizierte Weise ineinander verwoben sind.
60 KAPITEL 2. STABILITÄT
Kapitel 3<br />
Klassifikation dynamischer<br />
<strong>Systeme</strong><br />
3.1 Konjugation <strong>und</strong> Orbit-Äquivalenz<br />
Im Folgenden wollen wir die Analyse von dynamischen <strong>Systeme</strong>n erleichtern,<br />
indem wir gleich ganze Klassen von ,,gleichen”, ,,äquivalenten” usw.<br />
<strong>Systeme</strong>n untersuchen. Doch was sind geeignete Konzepte von ,,Gleichheit”,<br />
,,Äquivalenz” usw.?<br />
Für Abbildungen hat sich folgendes Konzept als brauchbar herausgestellt:<br />
Definition 3.1.0.1 Zwei C k -Diffeomorphismen f : X → X, g : Y → Y , 1 ≤<br />
k ≤ ∞, heißen topologisch konjugiert (oder C 0 -konjugiert), wenn es einen<br />
Homöomorphismus h : X → Y gibt mit<br />
f = h −1 ◦ g ◦ h.<br />
Allgemeiner heißen zwei C k -Diffeomorphismen f : X → X, g : Y → Y , 1 ≤<br />
k ≤ ∞, C j -konjugiert mit 1 ≤ j ≤ ∞, wenn es einen C j -Diffeomorphismus<br />
h : X → Y gibt mit f = h −1 ◦ g ◦ h.<br />
Beispiel 3.1.0.2 Die Abbildungen f, g :Ê→Ê, f(x) = 2x, g(x) = 8x, sind<br />
topologisch konjugiert mittels h(x) = x 3 , was ein Homöomorphismus ist. h ist<br />
kein Diffeomorphismus, <strong>und</strong> es gibt auch keinen solchen, wie wir in Kürze sehen.<br />
Wenn f, g C j -konjugiert sind, so muss h nicht eindeutig bestimmt sein.<br />
61
62 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME<br />
Beispiel 3.1.0.3 Wenn f = g : X → X, dann ist jeder Homöomorphismus<br />
h : X → X eine Konjugation.<br />
Diese Definition von Konjugation ist zwar leicht auf Flüsse zu übertragen,<br />
aber es wird sich gleich herausstellen, dass da ein anderes Konzept brauchbarer<br />
ist. Zunächst die analoge Definition:<br />
Definition 3.1.0.4 Zwei C k -Flüsse ϕ, ψ auf X, Y mit 1 ≤ k ≤ ∞ heißen<br />
topologisch konjugiert (C 0 -konjugiert), wenn es einen Homöomorphismus<br />
h : X → Y gibt, so dass für alle t ∈Êgilt:<br />
ϕ t = h −1 ◦ ψ t ◦ h.<br />
Allgemeiner heißen zwei C k -Diffeomorphismen f : X → X, g : Y → Y , k ≥ 1,<br />
C j -konjugiert mit 0 ≤ j ≤ ∞, wenn es einen C j -Diffeomorphismus h : X → Y<br />
gibt mit ϕ t = h −1 ◦ ψ t ◦ h.<br />
Hier taucht nun folgendes Problem auf: Sei beispielsweise ϕ der Fluss zu<br />
dem System<br />
ṙ = r, ˙θ = 1<br />
(in Polarkoordinaten) <strong>und</strong> ψ der Fluss zu<br />
ṙ = 2r, ˙θ = 2.<br />
Diese beiden <strong>Systeme</strong> haben dasselbe Phasenportrait, d.h. für jeden Punkt<br />
x ∈Ê2 durchläuft der Orbit von ϕ genau dieselben Punkte wie der Orbit<br />
von ψ durch x. Der einzige Unterschied ist, dass die Geschwindigkeit verschieden<br />
ist. Wir brauchen daher ein Konzept von Äquivalenz, das nicht<br />
so sensibel bezüglich des Zeitparameters ist. Folgendes ist brauchbar:<br />
Definition 3.1.0.5 Die C k -Flüsse ϕ, ψ auf X, Y mit 1 ≤ k ≤ ∞ heißen Orbitäquivalent<br />
(C 0 -Orbit-äquivalent), wenn es Homöomorphismen h : X → Y<br />
<strong>und</strong> σ :Ê→Êgibt, so dass σ orientierungserhaltend (d.h. monoton wachsend)<br />
ist <strong>und</strong> für alle t ∈Êgilt:<br />
ϕ t = h −1 ◦ ψ σ(t) ◦ h.<br />
Es gibt auch die Definition von C j -Orbit-Äquivalenz mit 0 ≤ j ≤ ∞;<br />
dabei wird gefordert, dass in der obigen Definition h ein C j -Diffeomorphismus<br />
ist. Allerdings wird für σ nach wie vor nur Homöomorphie gefordert.
3.1. KONJUGATION UND ORBIT-ÄQUIVALENZ 63<br />
Wenn also zwei Flüsse Orbit-äquivalent sind, dann können die Orbits zusammengestaucht<br />
werden.<br />
Unmittelbare Folgerungen der Definition sind:<br />
Lemma 3.1.0.6<br />
• Wenn f zu g C j -konjugiert ist (0 ≤ j ≤ ∞) <strong>und</strong> f einen Fixpunkt hat,<br />
dann auch g.<br />
• Wenn f zu g C j -konjugiert ist (0 ≤ j ≤ ∞), gibt es für jedes periodisches<br />
Orbit von f ein periodisches Orbit von g, <strong>und</strong> zwar mit derselben Periode.<br />
• Eine Identitätsabbildung 1l X ist zu keiner anderen Abbildung außer anderen<br />
Identitätsabbildungen 1l Y konjugiert.<br />
Beweis. Alle Punkte sind direkt einsehbar.<br />
Fast alles in diesem Lemma gilt auch für Konjugation von Flüssen <strong>und</strong><br />
für Orbit-Äquivalenz von Flüssen; allerdings kann sich die Periode eines<br />
periodischen Orbits bei Orbit-Äquivalenz ändern:<br />
Lemma 3.1.0.7<br />
• Wenn ϕ zu ψ C j -konjugiert ist (0 ≤ j ≤ ∞), gibt es für jeden periodischen<br />
Orbit von ϕ einen periodischen Orbit von ψ, <strong>und</strong> zwar mit derselben<br />
Periode.<br />
• Wenn ϕ zu ψ Orbit-äquivalent ist, gibt es für jeden periodischen Orbit<br />
von ϕ einen periodischen Orbit von ψ, aber nicht notwendigerweise mit<br />
derselben Periode.<br />
Beweis. Auch dieses Lemma ist direkt einsehbar.<br />
In fast allen Fällen kann man nur C 0 -Konjugation erwarten, auch bei<br />
glatten Abbildungen oder Flüssen. Eine Ausnahme macht folgender Satz:<br />
Satz 3.1.0.8 ( ”<br />
flow-box“) Wenn ϕ ein C 1 -Fluss auf einer n-dimensionalen Mannigfaltigkeit<br />
ist <strong>und</strong> das zugehörige Vektorfeld<br />
f(x) = d dt | t=0ϕ(x)
64 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME<br />
an der Stelle x 0 nicht verschwindet, dann gibt es eine offene Umgebung U von x 0 ,<br />
so dass ϕ| U (die Einschränkung von ϕ auf U) C 1 -konjugiert ist zum konstanten<br />
Fluss auf einer offenen Teilmenge desÊn , definiert durch<br />
ψ t (y) = y + te 1<br />
(mit e 1 = der erste Einheitsvektor inÊn ).<br />
Beweis. Folgt aus einer Konstruktion mittels eines (lokalen) Schnittes. Einen<br />
vollständigen Beweis findet man in jedem Lehrbuch über <strong>Gew</strong>öhnliche<br />
<strong>Differentialgleichungen</strong>.<br />
3.2 Hufeisen <strong>und</strong> Büroklammer<br />
Im Folgenden wollen wir ein Beispiel für eine ”<br />
chaotische“ Abbildung<br />
betrachten, ein sogenanntes Hufeisen. Das erste Beispiel eines solchen<br />
stammt von Smale; hier studieren wir eine abgewandelte Version, die angenehmer<br />
ist.<br />
Definition 3.2.0.9 Die die G-förmige Hufeisen-Büroklammer ist auf U =<br />
[0, 1] × [0, 1] definiert durch<br />
⎧( )<br />
⎪⎨ 3x,<br />
y<br />
für x ≤ 1/3<br />
(<br />
G : U →Ê2 3<br />
)<br />
, G(x, y) = 3x − 2,<br />
y+2<br />
für x ≥ 2/3<br />
3 ⎪⎩<br />
glatt fortgesetzt für x ∈ [1/3, 2/3]<br />
Diese Abbildung ist noch keine Abbildung eines Raums auf sich selbst.<br />
Um eine geeignete Menge als Definitionsbereich zu finden, betrachten wir:<br />
Definition 3.2.0.10 Sei f : X → X eine Abbildung. Eine Menge A ⊂ X heißt<br />
positiv invariant unter f, wenn f(A) ⊂ A. Für eine invertierbare Abbildung<br />
f heißt A negativ invariant, wenn f −1 (A) ⊂ A. Wenn A positiv <strong>und</strong> negativ<br />
invariant ist, heißt A bi-invariant oder einfach invariant. Eine Abbildung H :<br />
X → Y heißt invariant unter f, wenn H ◦ f = H.<br />
Vorsicht: Manche Bücher benutzen das Wort ”<br />
invariant“ als Synonym für<br />
,,positiv invariant” <strong>und</strong> nicht für ”<br />
bi-invariant“.
3.2. HUFEISEN UND BÜROKLAMMER 65<br />
Nun suchen wir eine möglichst große Menge imÊ2 , die unter G invariant<br />
ist. Beachte: Für eine allgemeine Abbildung von U ⊂Ê2 nachÊ2 gibt es<br />
zwar nicht unbedingt eine maximale invariante Menge. Hierfür bietet sich die<br />
Menge<br />
Λ = ⋂ i∈G i (U)<br />
an. Sie ist per Definition invariant, <strong>und</strong> sie ist Teilmenge von U, da U =<br />
G 0 (U).<br />
Definition 3.2.0.11 Die Standard-Cantormenge ist definiert als<br />
{<br />
∑ ∞<br />
C =<br />
n=0<br />
a n 3 −n : (a n ) n∈Æ0 erfüllt a n ∈ {0, 2} ∀n ∈Æ0<br />
Lemma 3.2.0.12 Es gilt:<br />
a) C ist überabzählbar.<br />
b) C ist homöomorph zum Cantor-Staub C × C. (Zwei Mengen heißen<br />
homöomorph, wenn es eine stetige Bijektion zwischen ihnen mit stetiger Umkehrabbildung<br />
gibt.)<br />
Beweis. a) Es gibt überabzählbar viele unendliche Folgen in {0, 2}. Wenn<br />
dann ist<br />
∑<br />
(a n ) n∈Æ≠(b n ) n∈Æ,<br />
n∈Æa n 3 −n ≠ ∑ n∈Æb n 3 −n ,<br />
denn wenn k die erste Stelle ist, an der sich a <strong>und</strong> b unterscheiden, dann<br />
ist<br />
| ∑ n∈Æa n 3 −n − ∑ n∈Æb n 3 −n | ≥ 3 −k − ∑ n>k<br />
2 · 3 −n > 0.<br />
}<br />
.<br />
b)<br />
f( ∑ n∈Æa n 3 −n ) = ( ∑ n∈Æa 2n 3 −n , ∑ n∈Æa 2n+1 3 −n )<br />
ist bijektiv, da<br />
f −1 (( ∑ n∈Æa n 3 −n , ∑ n∈Æb n 3 −n ) = ∑ n∈Æc n 3 −n
66 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME<br />
mit<br />
c n =<br />
{<br />
a n/2 für n gerade<br />
b (n−1)/2 für n ungerade.<br />
f ist stetig: Für ε > 0 sei k so groß, dass 3 −k < 2ε <strong>und</strong> wähle 0 < δ <<br />
3 −2k − ∑ n>2k 2 · 3−n > 0. Dann gilt für x = ∑ n∈Æa n 3 −n , y = ∑ n∈Æb n 3 −n<br />
mit |x − y| < δ, dass die ersten 2k Stellen von x <strong>und</strong> y übereinstimmen.<br />
Somit ist<br />
|f(x) − f(y)| ≤ | ∑ n∈Æ(a 2n − b 2n )3 −2n | + | ∑ n∈Æ(a 2n+1 − b 2n+1 )3 −(2n+1) |<br />
= | ∑ n>k<br />
(a 2n − b 2n )3 −2n | + | ∑ n>k(a 2n+1 − b 2n+1 )3 −(2n+1) | < ε.<br />
f −1 ist stetig: Für ε > 0 sei k so groß, dass 3 −k < ε <strong>und</strong> wähle 0 < δ <<br />
3 −k − ∑ n>k 2 · 3−n > 0. Dann gilt für x = ( ∑ n∈Æa n 3 −n , ∑ n∈Æb n 3 −n ), y =<br />
( ∑ n∈Æa ′ n 3−n , ∑ n∈Æb ′ n 3−n ) mit |x − y| < δ in der Summennorm, dass die<br />
ersten k Stellen von x <strong>und</strong> y in beiden Koordinaten übereinstimmen. Somit<br />
ist<br />
|f −1 (x) − f −1 (y)| ≤ ∑ n∈Æ|c n − c ′ n |3−n < ∑ n>k<br />
|c n − c ′ n |3−n < ε.<br />
mit<br />
{<br />
a n/2 für n gerade<br />
c n =<br />
b (n−1)/2 für n ungerade,<br />
{<br />
c ′ a ′ n/2<br />
für n gerade<br />
n =<br />
für n ungerade.<br />
b ′ (n−1)/2<br />
Lemma 3.2.0.13 Die Menge Λ = ⋂ i∈G i (U) ist der Standard-Cantor-Staub<br />
C × C, wobei C die Standard-Cantormenge ist.<br />
Beweis. U ∩ G(U) ist das Einheitsquadrat mit dem horizontalen ”<br />
Drittel“-<br />
Rechteck entfernt, also die zwei horizontalen Rechtecke [0, 1] × [ 0, 1 3]<br />
<strong>und</strong><br />
[0, 1] × [ 2<br />
3 , 1] . Da G aus zwei linearen Abbildungen besteht, wird bei der
3.2. HUFEISEN UND BÜROKLAMMER 67<br />
nächsten Anwendung von G aus jedem dieser Rechtecke wieder ein horizontales<br />
Drittel entfernt usw. Somit ist<br />
⋂<br />
i∈ÆG i (U) = [0, 1] × C.<br />
Für die Umkehrabbildung G −1 gilt, dass U ∩G −1 (U) aus den zwei vertikalen<br />
Rechtecken [ [<br />
0, 3] 1 ×[0, 1] <strong>und</strong> 2 , 1] ×[0, 1] besteht. Bei jeder weiteren<br />
3<br />
Anwendung von G wird aus jedem Rechteck wieder ein vertikales Drittel<br />
entfernt, <strong>und</strong> somit ist<br />
⋂<br />
G −i (U) = C × [0, 1].<br />
i∈Æ0<br />
Damit ist natürlich<br />
Λ = ⋂ i∈Z<br />
G i (U) = C × C.<br />
Diese Abbildung ist, wie wir sehen werden, ein Prototyp einer ,,chaotischen”<br />
Abbildung in folgendem Sinn:<br />
Definition 3.2.0.14 Eine Abbildung f : X → X, wobei X ein topologischer<br />
Raum ist, heißt topologisch transitiv, wenn es einen dichten Orbit gibt.<br />
Satz 3.2.0.15 Es sei X ein vollständiger metrischer Raum, der zusätzlich<br />
• separabel (d.h. er hat eine abzählbare dichte Teilmenge) sei <strong>und</strong><br />
• keine isolierten Punkte besitze.<br />
Es sei f : X → X stetig, dann sind die vier folgenden Bedingungen äquivalent:<br />
1. f ist topologisch transitiv.<br />
2. f besitzt einen dichten Halborbit.<br />
3. Für nichtleere offene Mengen U, V ⊂ X gibt es ein N ∈mit f N (U) ∩<br />
V ≠ ∅.<br />
4. Für nichtleere offene Mengen U, V ⊂ X gibt es ein N ∈Æmit f N (U) ∩<br />
V ≠ ∅.
68 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME<br />
Beweis. Die Implikationen (4) impliziert (3), bzw. (2) impliziert (1) sind<br />
klar. Wir beweisen nun (1) ⇒ (3). Sei {f n (x) : n ∈} dicht <strong>und</strong> U, V offen<br />
<strong>und</strong> nichtleer. Dann existieren n, m ∈mit f n (x) ∈ U, f m (x) ∈ V<br />
<strong>und</strong>dann ist f m−n (U) ∩ V ≠ ∅. (Beachte, hier wird nur die Stetigkeit von f<br />
verwendet, die weiteren Voraussetzungen werden nicht verwendet.)<br />
(1) ⇒ (4). Wir müssen zeigen, dass wir den Beweis so führen können, dass<br />
m > n. Ist also V offen, der Orbit dicht <strong>und</strong> besitzt X keine isolierten Punkte,<br />
dann gibt es in V Punkte, die nicht im Orbit liegen. (Orbit ist abzählbar,<br />
eine abgeschlossene Umgebung eines jeden Punktes ist ein vollständiger<br />
metrischer Raum <strong>und</strong> als solcher nicht die Vereinigung nirgends dichter<br />
Mengen (Satz von Baire) <strong>und</strong> jeder Punkt ist nirgends dicht.) Sei y ∈ V<br />
<strong>und</strong> nicht im Orbit von f. Also gibt es eine Folge m k → ∞ mit k → ∞ mit<br />
f m k (x) → y. Diese Folgenglieder sind ab eines bestimmten<br />
∈É<br />
Index alle in V<br />
<strong>und</strong> demzufolge, kann m > n gewählt werden.<br />
Nun beweisen wir (4) ⇒ (2) <strong>und</strong> (3) ⇒ (1). Sei also X separabel <strong>und</strong> eine<br />
der Bedingungen (3) oder (4) erfüllt. Sei S eine abzählbar dichte Teilmenge<br />
in X <strong>und</strong> es sei für j ∈ÆU j eine Abzählung der abzählbar vielen metrischen<br />
Kugeln<br />
B q (x) mit x ∈ S<strong>und</strong> 0 < q<br />
um Punkte x ∈ S mit Radien 0 < q ∈É. Wenn wir zeigen, dass es einen<br />
Orbit/Halborbit gibt, der jede dieser Mengen U j trifft, so sind wir fertig.<br />
Wir beginnen mit einem N 1 ∈oder N 1 ∈Æ, so dass f(U 1 ) ∩ U 2 ≠ ∅.<br />
Sei nun V 1 eine metrische Kugel vom Radius kleiner 1 in U 2 1 mit V 1 ⊂<br />
U 1 ∩f −N 1<br />
(U 2 ). Wähle V 2 eine metrische Kugel vom Radius höchstens 1 mit 4<br />
V 2 ⊂ V 1 ∩ f −N 2<br />
(U 3 ). Setze die Wahl induktiv fort: V n+1 ist metrische Kugel<br />
1<br />
vom Radius höchstens mit V<br />
2 n+1 n+1 ⊂ V n ∩ f −N n+1<br />
(U n+2 ). Nun bilden die<br />
Mittelpunkte der Kugeln von {V n } n∈Æeine Cauchyfolge. Sei x ∈ ⋂ n∈ÆV n .<br />
Dann ist f N n−1<br />
(x) ∈ U n für alle N n oder für alle n.<br />
Aufgabe 3.2.0.16 Man ergänze den letzten Schritt im Falle einer Abbildung f,<br />
die nicht invertierbar ist.<br />
Definition 3.2.0.17 Eine Abbildung f : X → X, wobei X ein topologischer<br />
Raum ist, heißt topologisch mischend, wenn es für alle nichtleeren offenen<br />
Mengen U, V ⊂ X ein N ∈Ægibt, so dass für alle n > N gilt: U ∩ f n (V )<br />
ist nicht leer.<br />
Diese beiden Begriffe sind eng miteinander verb<strong>und</strong>en. Wir haben den<br />
folgenden Satz.
3.3. SYMBOLISCHE DYNAMIK 69<br />
Satz 3.2.0.18 Jede topologisch mischende Abbildung ist topologisch transitiv.<br />
Beweis. Folgt aus Satz 3.2.0.15.<br />
Definition 3.2.0.19 Eine Abbildung f : X → X heißt chaotisch, wenn die<br />
Menge der periodischen Punkte dicht ist <strong>und</strong> die Abbildung topologisch transitiv<br />
ist.<br />
Diese Definition von Chaotizität stammt von Devaney 1 ; es gibt noch andere.<br />
Anstatt diese Eigenschaften für unsere Hufeisen-Büroklammer direkt<br />
zu zeigen, studieren wir zuerst ein gänzlich anders aussehendes System,<br />
sogenannte symbolische Dynamik. Dann werden wir sehen, dass diese augenscheinlich<br />
sehr verschiedenen <strong>Systeme</strong> vergleichbare Dynamik haben.<br />
3.3 Symbolische Dynamik<br />
Zunächst definieren wir die Symbolräume:<br />
Definition 3.3.0.20 [Symbolraum] Die Menge<br />
Ω = {(ω i ) i∈: ω i ∈ {0, 1} für alle i ∈}<br />
heißt Menge der zweiseitigen Sequenzen (oder zweiseitiger Symbolraum)<br />
<strong>und</strong><br />
Ω R = {(ω i ) i∈Æ0 : ω i ∈ {0, 1} für alle i ∈Æ0}<br />
heißt Menge der einseitigen Sequenzen (oder einseitiger Symbolraum).<br />
Darauf gibt es ein natürliches dynamisches System, welches alle Folgenglieder<br />
nach links schiebt:<br />
Definition 3.3.0.21 [Shift-Operator] Der Shift-Operator auf Ω (bzw. Ω R ) ist<br />
definiert durch<br />
σ(ω) i = ω i+1 .<br />
σ wird auch als topologischer Bernoulli-Shift bezeichnet.<br />
1 statt einer historischen Bemerkung ein Link:<br />
http://math.bu.edu/people/bob/
70 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME<br />
Auf der Menge der zweiseitige Sequenzen ist das eine Bijektion; auf der<br />
Menge der einseitigen Sequenzen dagegen nicht, denn dort wird der Wert<br />
von ω an der linkesten (0-ten) Koordinaten ”<br />
vergessen“ <strong>und</strong> mit ω 1 überschrieben.<br />
Die Symbolräume sind metrische Räume:<br />
Definition 3.3.0.22 [Metrik auf Symbolräumen] Auf Ω ist für jedes λ > 1 eine<br />
Metrik wie folgt definiert:<br />
d λ (α, ω) = ∑ i∈λ −|i| ∆(α i , ω i )<br />
mit ∆(a, b) = 0 für a = b <strong>und</strong> ∆(a, b) = 1 sonst, bzw. allgemeiner<br />
d λ (α, ω) = ∑ i∈λ −|i| |α i − ω i |.<br />
Natürlich kann man auch Symbolräume mit mehr als zwei Symbolen definieren.<br />
Dies findet man z.B. in [15]. Eine alternative Weise eine Topologie<br />
zu erklären ist, dass man Ω mit der Menge {0, 1}identifiziert. Versieht<br />
man nun die Menge {0, 1} mit der diskreten Topologie, so erhält man auf<br />
Ω die Produkttopologie, erinnert man sich noch daran, dass man {0, 1}<br />
auch mit einer Gruppenstruktur versehen kann, so wird Ω zu einer kompakten<br />
topologischen Gruppe. Wir betrachten eine weitere Konstruktion.<br />
Wähle ein k ∈Æ<strong>und</strong> zu dazu ganzzahlige Werte<br />
<strong>und</strong> α k ∈ {0, 1}.<br />
n 1 < n 2 < · · · < n k<br />
Definition 3.3.0.23 Ein Zylinder in Ω ist eine Menge der Form<br />
{<br />
}<br />
C n 1,...,n k<br />
α 1 ,...,α k<br />
= ω ∈ Ω ∣ ω ni = α i für k = 1 . . .n .<br />
Die Zahl k heißt Rang des Zylinders.<br />
Eine dritte Art <strong>und</strong> Weise eine Topologie zu erklären besteht nun darin,<br />
dass wir jeden Zylinder als offene Menge betrachten <strong>und</strong> dies als Basis<br />
einer Topologie. Man beachte, dass die Punkte in einem Zylinder an endlich<br />
vielen Stellen einen vorgegebenen Wert haben, d.h. an endlich vielen<br />
Stellen sind die Werte vorgegeben.
3.3. SYMBOLISCHE DYNAMIK 71<br />
Aufgabe 3.3.0.24 1. Man zeige Komplemente von Zylindern sind endliche<br />
Vereinigungen von Zylindern (also nach der dritten Definition auch offen).<br />
2. Die drei Methoden eine Topologie zu erklären führen auf die gleiche Topologie,<br />
insbesondere erzeugen für λ 1 ≠ λ 2 die Metriken d λ1 , d λ2 die gleichen<br />
Topologien.<br />
Bemerkung 3.3.0.25 Die gleichen Konstruktionen kann man auch mit einseitigen<br />
Symbolräumen machen.<br />
Satz 3.3.0.26 Periodische Punkte für σ sind in Ω, bzw. in Ω R dicht. In beiden<br />
Räumen ist σ topologisch mischend.<br />
Beweis. Die periodischen Punkte für σ sind gerade die Fixpunkte einer<br />
geeigneten Potenz von σ. Ist σ r ω = ω, so gilt für alle Indizes<br />
ω n = ω n+r .<br />
Für die Dichtheit der periodischen Punkte reicht es daher, in jedem Zylinder<br />
die Existenz eines periodischen Punktes nachzuweisen. In jedem<br />
Zylinder C gibt es einen Zylinder der Form<br />
wobei α für das 2m + 1-Tupel<br />
C m α = C−m,...,m α −m ,...,α m<br />
,<br />
α = (α −m , . . .,α m )<br />
steht. Aber in diesem Zylinder findet man den 2m + 2 periodischen Punkt<br />
ω, der sich durch Wiederholen der Folge α ergibt, also<br />
ω n = α k , −m ≤ k ≤ m <strong>und</strong> n − k = 0 mod2m + 1.<br />
Man beachte, dass es 2 2m+1 solcher endlichen Folgen α gibt. Um die Eigenschaft<br />
des topologischen Mischens nachzuweisen, muss man die entsprechende<br />
Eigenschaft für Zylinder nachweisen. Gegeben seien also zwei<br />
Zylinder C m 1,...m k<br />
α 1 ,...,α k<br />
<strong>und</strong> C n 1,...,n r<br />
β 1 ,...,β r<br />
. Wähle zunächst<br />
ω ∈ C m 1,...m k<br />
α 1 ,...,α k<br />
<strong>und</strong> betrachte n > max{m k + |n r | + |n 1 |}. Setze für j = 1, . . .r<br />
dann ist ω ∈ C m 1,...m k<br />
α 1 ,...,α k<br />
ω(n + n j ) = β j .<br />
<strong>und</strong> σ n ω ∈ C n 1,...,n r<br />
β 1 ,...,β r<br />
. Dies war zu beweisen.
72 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME<br />
Lemma 3.3.0.27 Der Cantor-Staub C ×C ist homöomorph zu Ω, die Abbildung<br />
G : C × C → C × C ist konjugiert zum Shift σ : Ω → Ω. Insbesondere ist G<br />
topologisch mischend, die periodischen Punkte liegen dicht <strong>und</strong> G ist chaotisch.<br />
Beweis. Wir betrachten die Abbildung h : Ω → Λ die Konjugation zwischen<br />
G <strong>und</strong> dem Shift auf Ω, definiert durch<br />
ω ↦→ h(ω) = ⋂ n∈G −n (V ωn ),<br />
wobei V 0 = [ 0, 1 3]<br />
× [0, 1] <strong>und</strong> V1 = [ 2<br />
3 , 1] × [0, 1]. Zu zeigen ist:<br />
1. h ist eine Bijektion<br />
2. h <strong>und</strong> h −1 sind beide stetig <strong>und</strong><br />
3. h konjugiert σ <strong>und</strong> G.<br />
Wir betrachten die folgenden Bilder
3.3. SYMBOLISCHE DYNAMIK 73
74 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME
3.3. SYMBOLISCHE DYNAMIK 75<br />
Wir sehen daran, dass endlich viele Schnitte von Mengen der Form G −n (V ωn )<br />
gerade Schnitte von entsprechenden Rechtecken mit C ×C sind. Diese bilden<br />
eine Basis für die Topologie auf C × C. Betrachten wir also<br />
∩ r j=1 G−n j<br />
(V ωnj )<br />
so ist dies gerade das Bild des Zylinders<br />
C n 1,...,n r<br />
ω n1 ,...ω nr<br />
.<br />
Durch Bilden des Schnitts über eine Folge von geschachtelten Rechtecken<br />
der Form<br />
∩ m j=−m G−j (V ωj )<br />
erhält man genau einen Punkt on C × C, ebensoliefern die Schnitte der<br />
entsprechenden Zylinder<br />
C −m,...,m<br />
ω −m ,...,ω m<br />
genau einen Punkt in Ω. Diese werden aufeinander abgebildet <strong>und</strong> aufgr<strong>und</strong><br />
der Konstruktion ist h Bijektion <strong>und</strong> in beiden Richtungen stetig.
76 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME<br />
Die Konjugationseigenschaft ist leicht zu sehen:<br />
( ) ⋂<br />
G<br />
n∈G −n (V ωn ) =<br />
n∈G ⋂ −n+1 (V ωn )<br />
=<br />
n∈G ⋂ −n (V ωn−1 )<br />
= h(σω).<br />
Lemma 3.3.0.28 Isometrien sind nicht topologisch mischend.<br />
Beweis. Ist f : X → X eine Isometrie, seien x, y, z verschiedene Punkte in<br />
X <strong>und</strong><br />
δ = 1 min{d(x, y), d(y, z), d(x, z)}.<br />
4<br />
Seien<br />
U = B δ (x), V 1 = B δ (y), V 2 = B δ (z).<br />
Sei W ⊂ X eine beliebige nichtleere Teilmenge <strong>und</strong><br />
{<br />
}<br />
D(W) = sup d(w 1 , w 2 ) ∣ w 1,2 ∈ W<br />
der Durchmesser von W . Da f eine Isometrie ist, ist<br />
Nun ist D(U) = 2δ <strong>und</strong> damit gilt<br />
Angenommen für ein n ∈ N gilt<br />
Seien u i ∈ U mit<br />
Dann ist<br />
D(W) = D(f(W)).<br />
D(f n (U)) = 2δ.<br />
f n (U) ∩ V 1 ≠ ∅, f n (U) ∩ V 2 ≠ ∅.<br />
f n (u i ) ∈ V i .<br />
2δ > d(u 1 , u 2 ) = d(f n (u 1 ), f n (u 2 )) > d(y, z)−(d(y, f n (u 1 ))−d(z, f n (u 2 ))) > 4δ−δ−δ.<br />
Damit kann es kein N ∈Ægeben, so dass für n > N <strong>und</strong> i = 1, 2 gilt<br />
Dies ist gerade die Behauptung.<br />
f n (U) ∩ V i ≠ ∅.
3.3. SYMBOLISCHE DYNAMIK 77<br />
Definition 3.3.0.29 Es sei X ein metrischer Raum, f : X → X stetig. Die<br />
Abbildung f heißt expandierend, falls ein λ 0 > 1 <strong>und</strong> ein ε > 0 existiert, so<br />
dass<br />
(x ≠ y ∧ d(x, y) < ε) ⇒ d(f(x), f(y)) > λ 0 d(x, y).<br />
Beispiel 3.3.0.30 Die Abbildungen E m : S 1 → S 1 : z ↦→ z m sind für m > 1<br />
expandierend.<br />
Lemma 3.3.0.31 Es sei X eine differenzierbare kompakte Mannigfaltigkeit mit<br />
Metrik d. Wir fordern von dieser Metrik, dass es zu jedem x ∈ X ein ε > 0 gibt,<br />
so dass für y ∈ B ε (x) gilt<br />
d(x, y) =<br />
∫ b<br />
inf ‖˙γ(s)‖ds.<br />
γ∈C 1 (I,X)<br />
a<br />
Eine stetig differenzierbare Abbildung f : X → X ist expandierend, falls es ein<br />
λ > 1 gibt, so dass für alle x ∈ X <strong>und</strong> alle v ∈ T x X gilt<br />
‖Df(x)v‖ ≥ λ‖v‖. (3.1)<br />
Beweis. Die Menge der ε-Kugeln, die im Lemma angegeben sind, bilden<br />
eine offene Überdeckung von X, aufgr<strong>und</strong> der Kompaktheit von X reichen<br />
endlich viele X zu überdecken, dann gibt es ein ε 0 > 0 (Lebesguezahl),<br />
so dass zu jedem x ∈ X die Kugel B ε0 (x) in einer der überdeckenden<br />
Mengen liegt.<br />
Unter den Voraussetzungen an f ist die Linearisierung in jedem Punkt<br />
surjektiv, d.h. der Satz über implizite Funktionen garantiert, dass das Bild<br />
einer ε-Kugel um x eine δ(x)-Kugel um f(x) enthält. Sei δ 0 = inf{δ(x), x ∈<br />
X} > 0. Dann betrachten wir für x, y ∈ X mit d(f(x), f(y)) < δ 0 C 1 -<br />
Kurven, die in B δ0 (f(x)) verlaufen f(x) <strong>und</strong> f(y) verbinden. Sei L(γ) die<br />
Länge von γ. Ferner sei ˜γ die eindeutige Kurve, die x mit y verbindet <strong>und</strong><br />
γ = f ◦ ˜γ.<br />
Dann ist<br />
L(γ) =<br />
∫ b<br />
‖˙γ(t)‖ dt =<br />
∫ b<br />
∫ b<br />
‖f ′ (γ(t)) ˜(t)γ‖ ˙ dt > µ<br />
‖ ˙ ˜(t)γ dt = µL(˜γ).<br />
Dann ist<br />
a<br />
d(f(x), f(y)) = inf<br />
γ<br />
a<br />
L(γ) > µ inf<br />
γ<br />
a<br />
L(˜γ) ≥ µd(x, y).
78 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME<br />
Korollar 3.3.0.32 Ist X = S 1 , so reicht anstatt 3.1 die schwächere Bedingung<br />
∀x ∈ S 1 : |f ′ (x)| > 1<br />
um sicherzustellen, dass f expandierend ist.<br />
Beweis. Statt des Argumentes mit der Bogenlänge kann im Eindimensionalen<br />
mit dem Mittelwertsatz gearbeitet werden, der eine Gleichheit<br />
d(f(x), f(y)) = f ′ (ξ)d(x, y)<br />
mit ξ ∈ (x, y) garantiert. Übergang zum Minimum ergibt die behauptete<br />
Ungleichung.<br />
Lemma 3.3.0.33 Expandierende Abbildungen auf S 1 sind topologisch mischend.<br />
Beweis. Betrachte die Projektion π :Ê→S 1 : x ↦→ [x], die jedem Punkt<br />
die Äquivalenzklasse inÊ/zuordnet. Ein Lift von f : S 1 → S 1 ist eine<br />
Abbildung F :Ê→Ê, so dass<br />
f ◦ π = π ◦ F<br />
ist. Ein Lift ist eindeutig bist auf eine additive ganzzahlige Konstante (Beweis<br />
der Existenz in den Übungen.) Wir betrachten nun eine offene Menge<br />
U in S 1 . π −1 (U) enthält ein Intervall I positiver Länge. Dann gibt es ein<br />
F n (I) ein Intervall ist, dessen Länge größer als 1 ist. Dann ist π(F n (I)) =<br />
S 1 <strong>und</strong> π(F n (U)) ⊃ π(F n (I)) = S 1 = f n (π(I)). Insbesondere schneidet<br />
f n (U) jede offene Menge V nichtleer.
Kapitel 4<br />
Fraktale <strong>und</strong> Dimension<br />
4.1 Selbstähnlichkeit<br />
Was sind Fraktale? Das Wort ”<br />
fraktal“ kommt von ”<br />
zerbrochen“ <strong>und</strong> steht<br />
für die nicht-ganzzahlige Dimension. Wir betrachten also Objekte deren<br />
Dimension keine ganze Zahl ist. Einige solche Objekte sind seit einigen<br />
Jahren gut bekannt. Oft werden diese als selbstähnlich bezeichnet. Um diesem<br />
Begriff näher zu kommen betrachten wir wieder die Cantormenge C<br />
<strong>und</strong> eine Abbildung<br />
f : C → C : x ↦→ x 3 .<br />
Dieses Abbildung bildet die Cantormenge auf den Schnitt der Cantormenge<br />
mit dem Intervall [0, 1 (x+2)<br />
] ab, genauso kann man die Abbildung x ↦→<br />
3 3<br />
betrachten, die C auf den rechten Teil von C abbildet. Jeder Schnitt der<br />
Cantormenge mit einem Intervall der Länge 3 −n , das bei der Konstruktion<br />
von C auftritt, ist Bild der Cantormenge unter einer (affin linearen) Kontraktion.<br />
Das heißt jeder solcher Teil ist der Menge C ähnlich, dies motiviert<br />
uns C, als selbstähnlich zu bezeichnen. Für die formale Definition des<br />
Begriffes benötigen wir den nachfolgenden Satz, der eine Verallgemeinerung<br />
des Banachschen Fixpunktsatzes ist <strong>und</strong> auf Hutchinson zurückgeht.<br />
Satz 4.1.0.34 Es sei X ein vollständiger metrischer Raum, T i : X → X sei für<br />
i = 1, . . ., m jeweils eine Kontraktion. Dann gibt es genau eine kompakte Menge<br />
K ⊂ X mit<br />
n⋃<br />
K = T i (K). (4.1)<br />
i=1<br />
79
80 KAPITEL 4. FRAKTALE UND DIMENSION<br />
Für den Beweis benötigen wir einige Hilfsmittel, die wir in Form mehrerer<br />
Lemmata formulieren.<br />
Definition 4.1.0.35 Eine Teilmenge K eines metrischen Raumes X heißt total<br />
beschränkt, falls es zu jedem ε > 0 eine endliche Teilmenge N ⊂ K gibt mit<br />
K ⊂ ⋃<br />
B ε (x).<br />
x∈N<br />
Lemma 4.1.0.36 In einem metrischen Raum X sind für eine Teilmenge K ⊂ X<br />
die folgenden Aussagen äquivalent:<br />
1. K ist (überdeckungs) kompakt.<br />
2. K ist folgenkompakt, d.h. jede Folge in K enthält eine konvergente Teilfolge.<br />
3. K ist total beschränkt <strong>und</strong> vollständig.<br />
Beweis. (1) impliziert (2): Sei K kompakt, {x n } n∈Æeine Folge in K, die<br />
keine konvergente Teilfolge besitze. Dann gibt es auch keinen Häufungspunkt<br />
der Folge, d.h. für jedes x ∈ K gilt, dass es ein ε(x) > 0 gibt<br />
mit B ε(x) (x) enthält nur endlich viele Folgenglieder. Nun bildet die Menge<br />
{B ε(x) (x)} x∈K eine endliche Überdeckung, also gibt es eine endliche<br />
Teilüberdeckung<br />
m⋃<br />
K ⊂ B ε(xi )(x i ).<br />
i=1<br />
Jede dieser endlich vielen Kugeln enthält nur endlich viele Folgenglieder,<br />
also ist die Folge endlich.<br />
(2) impliziert (3): Wir wollen nun zeigen, dass zu jedem ε > 0 endlich viele<br />
Elemente x i ∈ K, i = 1, . . .,m existieren mit<br />
K ⊂<br />
m⋃<br />
B ε (x i ).<br />
i=1<br />
Angenommen, dies ist nicht der Fall. Dann gibt es ein ε > 0, so dass für je<br />
endlich viele Punkte x i ∈ K, i = 1, . . .,m immer gilt<br />
K ≠<br />
m⋃<br />
B ε (x i ).<br />
i=1
4.1. SELBSTÄHNLICHKEIT 81<br />
Sei ein solches ε > 0 gegeben. Dann ist zu beliebig gewählten x 1 ∈ K die<br />
Menge B ε (x 1 ) ≠ K, also gibt es ein<br />
K ∋ x 2 /∈ B ε (x 1 ).<br />
Angenommen x 1 , . . ., x k seien konstruiert mit<br />
K ∋ x j+1 /∈<br />
j⋃<br />
B ε (x i ), j = 1, . . .,k − 1.<br />
i=1<br />
Dann ist aufgr<strong>und</strong> der Voraussetzung<br />
<strong>und</strong> wir finden ein<br />
K ≠<br />
k⋃<br />
B ε (x i )<br />
i=1<br />
K ∋ x k+1 /∈<br />
k⋃<br />
B ε (x i ).<br />
Damit konstruieren wir induktiv eine Folge {x k } k∈Æ, so dass jedes Folgenglied<br />
zu allen vorherigen einen Abstand mindestens ε hat. Also hat diese<br />
Folge keine konvergente Teilfolge, im Widerspruch zur Annahme. Damit<br />
ist diese Implikation gezeigt.<br />
(3) impliziert (1): Wir nehmen an, K sei total beschränkt, aber nicht kompakt.<br />
Dann gibt es eine Überdeckung U, so dass<br />
i=1<br />
K ⊂ ⋃ U∈U<br />
U,<br />
aber je endlich viele dieser Mengen U überdecken K nicht. Wir nehmen an,<br />
dass X total beschränkt sei, also gibt es zu ε 1 = 1 eine endliche Teilmenge<br />
x 1 1, . . .,x 1 r 1<br />
mit<br />
K ⊂<br />
r 1<br />
⋃<br />
i=1<br />
B 1 (x).<br />
Nun überdeckt U jede der Mengen B 1 (x i ), i = 1, . . .r mindestens eine dieser<br />
Mengen besitzt keine endliche Teilüberdeckung, dies sei oBdA B 1 (x 1 ).<br />
Setze ε 2 = 1 2 . Dann gibt es x2 1, . . .,x 2 r 2<br />
∈ K mit<br />
K ⊂<br />
r 2<br />
⋃<br />
i=1<br />
B ε2 (x 2 i ).
82 KAPITEL 4. FRAKTALE UND DIMENSION<br />
Insbesondere ist<br />
B 1 (x 1 ) ⊂<br />
r 2<br />
⋃<br />
i=1<br />
(B 1 (x 1 ) ∩ B ε2 (x 2 i)).<br />
Eine dieser endlich vielen Mengen ist nicht endlich überdeckbar, oBdA ist<br />
dies<br />
(B 1 (x 1 ) ∩ B ε2 (x 2 1 )).<br />
Wähle ε 3 = 1 4 <strong>und</strong> wiederhole den Vorgang. Induktiv sei ε n = 2 1−n für<br />
n ≥ 1 definiert <strong>und</strong> Mengen<br />
B 1 (x 1 1 ) ∩ · · · ∩ B ε n<br />
(x n 1 )<br />
gef<strong>und</strong>en, die nicht endlich überdeckbar sind (bzgl. U). Betrachte die Folge<br />
{x n 1 } n∈Æ.<br />
Diese ist eine Cauchyfolge in K. Der Grenzwert (der aufgr<strong>und</strong> der Vollständigkeitsannahme<br />
für K) in K existiert, sei x 0 . Dann gibt es ein U ∈ U mit<br />
x 0 ∈ U. Da U offen ist, gibt es ein δ > 0 mit B δ (x 0 ) ⊂ U. Insbesondere gibt<br />
es n 0 ∈ N mit n > n 0 impliziert x n ∈ B δ (x 0 ). Sei n 1 > n 0 , so dass<br />
2<br />
ε n < δ 2 .<br />
Dann ist für n > n 1<br />
B εn (x n ) ⊂ B δ(x n ) ⊂ B δ (x 0 ) ⊂ U.<br />
2<br />
Dies ist ein Widerspruch, dies beweist die Behauptung.<br />
Beweis von Satz 4.1.0.34. Wir betrachten die Halbgruppe von Abbildungen<br />
G, die von den Kontraktionen T 1 , . . .,T m erzeugt wird. Wir wollen<br />
im ersten Schritt zeigen, dass ein Orbit eines Punktes x ∈ X unter dieser<br />
Halbgruppe, d.h. eine Menge der Form<br />
{<br />
gx<br />
∣ g ∈ G<br />
total beschränkt ist. Dazu zeigen wir, dass ein solcher Orbit in einer metrischen<br />
Kugel enthalten ist. Dazu sei x ∈ X gegeben. Sei<br />
{<br />
}<br />
r = max d(x, T j x) ∣ j = 1, . . ., m<br />
}
4.1. SELBSTÄHNLICHKEIT 83<br />
<strong>und</strong><br />
∣ } ∣∣<br />
λ = max<br />
{λ j j = 1, . . ., m .<br />
Es gilt λ < 1. Jedes g ∈ G ist von der Form<br />
g = T ig(j) ◦ T ig(j−1) ◦ · · · ◦ T ig(1), i g (j) ∈ {1, . . ., m}.<br />
Dann ist mit der Bezeichnung<br />
j∏<br />
T ig(s)x = T ig(j) ◦ · · · ◦ T ig(k)x<br />
s=k<br />
d(gx, x) ≤<br />
≤<br />
≤<br />
≤<br />
j−1<br />
∑ j∏<br />
d(<br />
k=1<br />
s=k<br />
T ig(s)x,<br />
j∏<br />
s=k+1<br />
j−1<br />
∑<br />
λ j−k−1 d(T ig(k)x, x)<br />
k=1<br />
j−2<br />
∑<br />
λ k<br />
r<br />
k=1<br />
r<br />
1 − λ .<br />
T ig(s)x)<br />
Wir ordnen nun Worten w in m Zeichen α 1 , . . .,α m Operatoren T w zu, indem<br />
wir zunächst Worten aus einem Zeichen α i den Operator T i zuordnen<br />
<strong>und</strong> bei Worten w der Länge |w| = j, w = (w 1 , . . .,w n )<br />
T w = T w1 ◦ · · · ◦ T wj<br />
schreiben. Sei nun ε > 0 gegeben. Wir definieren j 0 durch die Relation<br />
λ j 0<br />
r<br />
1 − λ < ε.<br />
Dann ist für x, y ∈ X mit d(x, y) < r<br />
1−λ <strong>und</strong> für jedes Wort w der Länge j 0,<br />
d(T w x, T w y) < ε.<br />
Wir betrachten nun alle Worte W j0 = {w | |w| ≤ j 0 } der Länge höchstens<br />
j 0 . Setze<br />
{<br />
}<br />
N = T w x ∣ w ∈ W j0 .
84 KAPITEL 4. FRAKTALE UND DIMENSION<br />
Dann gilt für jedes Wort in m Zeichen, dass<br />
w = w 1 +w 2 , w 1 ∈ W j0 , + steht hier für das Aneinanderhängen von Worten<br />
wobei |w 1 | ≤ j 0 <strong>und</strong> |w 2 | = 0 falls |w 1 | < j 0 . Dann ist<br />
Tw = T w 1 ◦ T w 2<br />
mit |w 1 | ≤ j 0 <strong>und</strong> T w 2 = 1l, falls |w 1 | < j 0 . Ist nun |w| < j 0 , so ist T w x ∈ N<br />
<strong>und</strong> insbesondere in ⋃<br />
B ε (ξ).<br />
Ist |w 1 | = j 0 , so ist<br />
<strong>und</strong><br />
ξ∈N<br />
d(T w 2x, x) ≤<br />
r<br />
1 − λ<br />
d(T w x, T w 1x) = d(T w 1 ◦ T w 2x, T w 1x) ≤ λ j 0<br />
d(T w 2x, x) ≤ λ j r<br />
0<br />
1 − λ = ε.<br />
Insbesondere ist<br />
T w x ∈ ⋃<br />
B ε (ξ).<br />
ξ∈N<br />
Also ist Gx total beschränkt. Dann ist Gx kompakt <strong>und</strong> invariant unter allen<br />
T j , j = 1, . . .,m. Also ist die Menge der kompakten invarianten Mengen<br />
nicht leer. Ist nun K eine durch Inklusion vollständig geordnete Kette<br />
solcher kompakten invarianten Teilmengen, so besitzt dies ein minimales<br />
Element (den Durchschnitt, der nichtleer kompakt <strong>und</strong> invariant ist. Damit<br />
sind die Voraussetzungen des Zornschen Lemmas erfüllt <strong>und</strong> es gibt<br />
eine untere Schranke, d.h. eine kompakte nichtleere <strong>und</strong> invariante Menge,<br />
die minimal bezüglich Inklusion <strong>und</strong> der Eigenschaften kompakt <strong>und</strong><br />
invariant zu sein, ist. Sei K diese Menge. Dann ist offensichtlich T i (K) ⊂ K<br />
<strong>und</strong> demzufolge<br />
m⋃<br />
T i (K) ⊂ K.<br />
Setze nun<br />
i=1<br />
K ′ =<br />
m⋃<br />
T i (K).<br />
i=1
4.1. SELBSTÄHNLICHKEIT 85<br />
Dann ist K ′ kompakt <strong>und</strong><br />
T i (K ′ ) ⊂ T i (K) ⊂ K ′ .<br />
Also ist K ′ invariant <strong>und</strong> wegen der Minimalität von K gilt K ′ = K, also<br />
genügt K der Gleichung (4.1)<br />
Die Eindeutigkeit sieht man leicht. Ist K kompakt <strong>und</strong> invariant <strong>und</strong><br />
T i x 0 = x 0 , so ist für x ∈ K die Folge {T j<br />
i x} j∈Ækonvergent <strong>und</strong> aufgr<strong>und</strong><br />
der Invarianz von K ist jedes Folgenglied in K. K ist kompakt, also ist<br />
K ∋ lim T j<br />
i x = x j→∞<br />
0.<br />
Insbesondere besitzen je zwei nichtleere invariante <strong>und</strong> kompakte Mengen<br />
nichtleeren Durchschnitt. Dann nehmen wir an K, K ′ sind kompakt,<br />
invariant, erfüllen die Gleichung (4.1) <strong>und</strong> K ist minimales Elemente bezüglich<br />
der Halbordnung durch Inklusion. Dann ist<br />
K ∩ K ′ ≠ ∅, kompakt, invariant<br />
<strong>und</strong> genügt der Gleichung (4.1). Ist nun K ′ ≠ K so erhalten wir aus K ∩<br />
K ′ ⊂ K <strong>und</strong> der Minimalität von K, dass K ∩ K ′ = K <strong>und</strong> damit folgt die<br />
Eindeutigkeit.<br />
Definition 4.1.0.37 Eine kompakte Menge K ∈Ên heißt selbstähnlich, wenn<br />
es eine endliche Anzahl von Kontraktionen T i , i = 1, . . .,m gibt mit<br />
K =<br />
m⋃<br />
T i (K),<br />
i=1<br />
<strong>und</strong> zusätzlich gilt, dass das Maß von T i (K) ∩ T j (K) für i ≠ j gleich Null ist.<br />
Bemerkung 4.1.0.38 Ersetzt man in der letzten Bedingung das Maß durch andere<br />
Konstruktionen, so kann man allgemeinere Begriffe von Selbstähnlichkeit<br />
erhalten.<br />
Beispiel 4.1.0.39 Mit X = [0, 1] <strong>und</strong> T x = 1x, T 3 2x = 1x + 2 3 3<br />
gesehen, die Cantormenge C als selbstähnliche Menge.<br />
erhält man, wie<br />
Weitere Beispiele sind folgende selbstähnliche Objekte:
86 KAPITEL 4. FRAKTALE UND DIMENSION<br />
• Der Cantor-Staub,<br />
• das Sierpinski-Dreieck,<br />
• der Sierpinski-Teppich,<br />
• der Menger-Schwamm,<br />
• die von Koch-Kurve.<br />
Dabei werden diese Objekte durch folgende Konstruktionen erhalten (C<br />
<strong>und</strong> C × C kennen wir ja bereits):<br />
1. Sierpinski-Dreieck: wir betrachten ein gleichseitiges Dreieck D 0 0 <strong>und</strong><br />
verbinden die Kantenmittelpunkte wieder zu einem Dreieck U 0 <strong>und</strong><br />
betrachten<br />
D 1 = D 0 \ U 0 .<br />
D 1 besteht aus drei gleichseitigen Dreiecken D1, j j = 1, 2, 3. Nun wiederholen<br />
wir den Schritt, den wir auf D 0 angewendet haben für jedes<br />
der Dreiecke D j 1 <strong>und</strong> damit neun Dreiecke Dj 2 , j = 1, . . .9. Durch Iteration<br />
erhalten wir eine selbstähnliche Menge imÊ2 .<br />
2. Sierpinski-Teppich: Wir betrachten ein Quadrat Q 0 <strong>und</strong> teilen die<br />
kanten jeweils in drei gleiche Teile. Dadurch zerlegen wir das Quadrat<br />
in 9 Quadrate, das mittlere bezeichnen wir mit U 0 . Sei<br />
Q 1 = Q 0 \ U 0 .<br />
Damit bleiben 8 Quadrate Q j 1, j = 1, . . .,8 übrig, auf jedes dieser<br />
Quadrate wenden wir wieder den ersten Schritt an <strong>und</strong> erhalten<br />
Q 2 = ⋃ Q j 2 , j = 1, . . .64.<br />
Wie zuvor ist offensichtlich, dass wir ein selbstähnliches Gebilde erhalten.<br />
3. Der Menger Schwamm ergibt sich als dreidimensionales Analogon<br />
des Sierpinski-Teppichs: wir betrachten den Kubus [0, 1] 3 in jeder Koordinatenebene<br />
konstruieren wir den Sierpinski-Teppich im Quadrat<br />
[0, 1] 2 . Für jede zu entnehmende Menge U betrachten wir U × [0, 1]
4.2. SELBSTÄHNLICHKEITSDIMENSION 87<br />
bzw. [0, 1] × U <strong>und</strong> die dritte (weniger bequem zu formulierende<br />
Menge. Wir entnehmen aus [0, 1] 3 all diese mengen, das verbleibende<br />
Objekt nennen wir Menger-Schwamm, wiederum durch die Konstruktion<br />
erhalten wir sofort die selbstähnlichkeit.<br />
4. In diesem Fall beginnen wir wieder mit einem Intervall [0, 1] × {0} ⊂<br />
Ê2 <strong>und</strong> ersetzen nun das mittlere Drittel der Strecke durch ein nach<br />
oben gerichtetes gleichseitiges Dreieck (ohne Bodenlinie). Durch Iteration<br />
erhalten wir die von-Koch Kurve.<br />
5. Die von-Kochsche Schneeflocke wird durch den eben beschriebenen<br />
Prozess mit einem gleichseitigen Dreieck am Anfang definiert<br />
Für diese Mengen wollen wir einen Begriff der Dimension definieren. Bisher<br />
hat sich kein eindeutigen Dimensionsbegriff für solche Konstruktionen<br />
durchgesetzt. Es gibt unter Anderem folgende Definitionen von fraktaler<br />
Dimension, die leider nicht äquivalent sind:<br />
1. Selbstähnlichkeitsdimension,<br />
2. Hausdorff-Dimension,<br />
3. Box-Dimension.<br />
Gemeinsame Eigenschaft all dieser Dimensionsbegriffe ist: Der n-dimensionale<br />
Einheitswürfel hat Dimension n. Allgemeiner soll gelten: Wenn wir die<br />
Menge A in jeder Koordinatenrichtung in 10 Scheiben schneiden <strong>und</strong> dann<br />
10 d Stücke herauskommen, soll die Dimension gleich d sein. Ebenso mit<br />
der Zahl 10 ersetzt durch eine beliebige Zahl.<br />
Für selbstähnliche Mengen, also solche, die aus verkleinerten Kopien<br />
von sich selbst zusammengesetzt sind, bietet sich die Definition aus dem<br />
nachfolgenden Abschnitt an.<br />
4.2 Selbstähnlichkeitsdimension<br />
Definition 4.2.0.40 Wenn eine Menge A ⊂Ên aus k Kopien von Bildern von<br />
sich selbst zusammengesetzt ist, die alle mit dem Faktor s ∈ (0, 1) skaliert sind,<br />
so ist die Selbstähnlichkeitsdimension von A gleich<br />
dim<br />
S<br />
(A) = − log k<br />
log s .
88 KAPITEL 4. FRAKTALE UND DIMENSION<br />
Das ist dadurch motiviert, dass wir erwarten, dass die Dimension d die<br />
Gleichung<br />
( ) d 1<br />
= k<br />
s<br />
erfüllt. Auflösen nach d ergibt gerade die Formel in der Definition.<br />
Beispiel 4.2.0.41 1. Die Standard-Cantormenge C besteht aus k = 2 Kopien,<br />
die mit s = 1/3 skaliert sind. Somit ist<br />
dim<br />
S<br />
(C) = log 2<br />
log 3 .<br />
2. Das Sierpinski-Dreieck D besteht aus k = 3 Kopien, skaliert mit s = 1/2.<br />
Somit ist<br />
dim<br />
S<br />
(D) = log 3<br />
log 2 .<br />
3. Für den Sierpinski-Teppich T ist k = 8 <strong>und</strong> s = 1/3, somit<br />
dim<br />
S<br />
(T) = log 8<br />
log 3 .<br />
Aufgabe 4.2.0.42 Was ist die Selbstähnlichkeitsdimension des Menger-Schwamms?<br />
Wenn wir dem n-fachen Cantor-Staub C × · · · × C ⊂Ên betrachten (das<br />
n-fache Produkt der Standard-Cantormenge C), wie ist dann die Selbstähnlichkeitsdimension?<br />
Was ist die Selbstähnlichkeitsdimension der Cantormenge C(λ), die entsteht,<br />
wenn aus [0, 1] das offene mittlere Intervall der Länge λ ∈ (0, 1) entfernt wird,<br />
aus jedem verbleibenden Intervall der Länge x wieder das offene mittlere Intervall<br />
der Länge λx ∈ (0, 1) entfernt wird usw.?<br />
Natürlich sind solchermaßen selbstähnliche Mengen sehr speziell. Man<br />
kann die Definition noch etwas erweitern, um zuzulassen, dass der Skalierungsfaktor<br />
s bei jeder Kopie anders ist. Wir wollen uns aber gleich die allgemeinste<br />
Definition von Dimension ansehen, nämlich die der Hausdorff-<br />
Dimension.
4.3. HAUSDORFF-DIMENSION 89<br />
4.3 Hausdorff-Dimension<br />
Definition 4.3.0.43 Für eine Menge A inÊn <strong>und</strong> d ∈Ê<strong>und</strong> ε > 0 ist<br />
h d ε (A) = inf{ ∑ i∈Ædiam(U i ) d | (U i ) i∈ÆÜberdeckung von A,<br />
diam(U i ) < ε ∀i ∈Æ}.<br />
Das d-dimensionale Hausdorff-Maß ist<br />
h d (A) = lim<br />
ε→0<br />
h d ε (A).<br />
Letzterer Limes ist wohldefiniert, da h d ε monoton in ε ist. Alle Überdeckungen,<br />
die für ein ε > 0 zugelassen sind, sind auch für alle größeren<br />
ε ′ > ε > 0 zugelassen. Daher wird in diesem Fall das Infimum für ε < ε ′<br />
über weniger Überdeckungen gebildet <strong>und</strong> daher ist das Infimum für den<br />
kleineren Wert größer <strong>und</strong> man hat in diesem Fall<br />
h d ε (A) ≥ hd ε ′(A).<br />
Also existiert der Grenzwert in diesem Fall inÊ∪{∞}. Man kann nun<br />
folgenden Satz zeigen.<br />
Satz 4.3.0.44 Für jedes A gibt es ein d ∈ [0, ∞] mit<br />
Definition 4.3.0.45 Die Zahl<br />
h s (A) = ∞<br />
für s < d<br />
h s (A) = 0 für s > d.<br />
dim<br />
H<br />
(A) = inf{s > 0 : h s (A) = 0}<br />
= sup{s ≥ 0 : h s (A) = ∞}<br />
heißt die Hausdorff-Dimension von A.<br />
Bemerkung 4.3.0.46 Es folgt, dass für jedes nichtleere A die Hausdorff-Dimension<br />
gleich der Zahl d in dem vorigen Satz ist. Für die leere Menge kann man wahlweise<br />
0 oder −∞ als Dimension festsetzen. Letzteres ist praktisch, da dann Formeln<br />
wie dim H (A × B) ≥ dim H (A) + dim H (B) stimmen. In der Literatur wird aber<br />
trotzdem oft 0 benutzt.
90 KAPITEL 4. FRAKTALE UND DIMENSION<br />
Bemerkung 4.3.0.47 Für s = dim H (A) muss h s (A) keineswegs eine Zahl in<br />
(0, ∞) sein; auch 0 <strong>und</strong> ∞ sind möglich.<br />
Aufgabe 4.3.0.48 Finden Sie solche Mengen A.<br />
Der Vorteil der Hausdorff-Dimension ist, dass beliebigen Mengen eine<br />
Dimension zugeordnet werden kann. Das Problem mit der Hausdorff-<br />
Dimension ist, dass ihre Berechnung sehr schwer ist, sogar für ganz einfach<br />
Mengen wie [0, 1] n oder die Standard-Cantormenge. Daher befassen<br />
wir uns jetzt noch mit einer weiteren Dimensionsdefinition, die immer<br />
noch reichlich allgemein ist, aber mit wesentlich weniger Aufwand berechenbar<br />
ist, sogar automatisiert per Computer.<br />
4.4 Box-Dimension<br />
Es gibt verschiedene Berechnungsvorschriften für die Box-Dimension, die<br />
alle dasselbe Ergebnis liefern <strong>und</strong> daher alle als Definition taugen.<br />
Zunächst eine Definition, die herauskommt, wenn wir in der Definition<br />
der Hausdorff-Dimension den Term diam(U i ) ersetzen durch die obere<br />
Schranke für diese Durchmesser, also eine Zahl, die nicht von i abhängt:<br />
Definition 4.4.0.49 Sei A eine kompakte Menge inÊn .<br />
Sei N(δ) die kleinste Zahl, so dass A mit N(δ) offenen Mengen von Durchmesser<br />
δ überdeckt werden kann.<br />
Definiere die untere Box-Dimension als<br />
dim B (A) := lim δ→0<br />
log N(δ)<br />
− log δ<br />
<strong>und</strong> die obere Box-Dimension als<br />
dim B (A) := lim δ→0<br />
log N(δ)<br />
− log δ<br />
= lim inf<br />
δ→0<br />
= lim inf<br />
δ→0<br />
log N(δ)<br />
− log δ<br />
log N(δ)<br />
− log δ .<br />
Wenn diese Zahlen übereinstimmen, heißt die Zahl die Box-Dimension von A :<br />
dim<br />
B<br />
(A) := lim<br />
δ→0<br />
log N(δ)<br />
− log δ .
4.4. BOX-DIMENSION 91<br />
Diese Definition ist schon leichter zu benutzen, erfordert aber immer noch<br />
etwas Gehirneinsatz bei der Berechnung von N(δ). Daher hier eine weitere<br />
(äquivalente Definition), die so einfach ist, dass ein Computer sie benutzen<br />
kann:<br />
Definition 4.4.0.50 Die δ-Parkettierung desÊn ist die Menge<br />
P(δ) := {[k 1 δ, (k 1 + 1)δ] × · · · × [k n δ, (k n + 1)δ]},<br />
die aus kompakten Würfel der Kantenlänge δ besteht, welche Eckpunkte auf dem<br />
Gitter δn haben.<br />
Für eine Menge A sei N 2 (δ) die Zahl der Würfel in P(δ), die A schneiden.<br />
Dann können die untere Box-Dimension, die obere Box-Dimension <strong>und</strong> bei<br />
Gleichheit die Box-Dimension so definiert werden wie oben mit N ersetzt durch<br />
N 2 .<br />
Definition 4.4.0.51 Sei N 3 (δ) die minimale Zahl von Würfeln (der Dimension<br />
n), welche A ⊂Ên überdecken, nicht notwendigerweise Elemente der Parkettierung<br />
P(δ).<br />
Dann können die untere Box-Dimension, die obere Box-Dimension <strong>und</strong> bei<br />
Gleichheit die Box-Dimension so definiert werden wie oben mit N ersetzt durch<br />
N 3 .<br />
Definition 4.4.0.52 Sei N 4 (δ) die kleinste Zahl, so dass A mit N(δ) offenen<br />
Bällen von Durchmesser δ überdeckt werden kann.<br />
D.h. N 4 (δ) ist so definiert wie N(δ), außer dass statt beliebigen offenen Mengen<br />
nun Bälle genommen werden.<br />
Dann können die untere Box-Dimension, die obere Box-Dimension <strong>und</strong> bei<br />
Gleichheit die Box-Dimension so definiert werden wie oben mit N ersetzt durch<br />
N 3 .<br />
Satz 4.4.0.53 Die Box-Dimension, untere <strong>und</strong> obere Box-Dimension sind unabhängig<br />
davon, ob in der Definition N, N 2 , N 3 oder N 4 steht.<br />
Beweis. Jede Menge von Durchmesser δ ist enthalten in einem Cluster aus<br />
3 × · · · × 3 Elementen der Parkettierung P(δ), also ist N 3 ≤ N 2 ≤ 3 n N.<br />
Ein n-Würfel der Kantenlänge 1 kann mit K(n) Bällen von Durchmesser<br />
1 überdeckt werden, wobei die Konstante K(n) nur von n abhängt.<br />
Also ist N ≤ K(n)N 3 ≤ K(n)N 2 .
92 KAPITEL 4. FRAKTALE UND DIMENSION<br />
Offensichtlich ist auch N ≤ N 3 , da jeder Ball von Durchmesser δ in<br />
einen n-Würfel von Durchmesser δ passt.<br />
Weiterhin ist N = N 4 , da jeder offene Ball von Durchmesser δ eine offene<br />
Menge von Durchmesser δ ist <strong>und</strong> jede offene Menge von Durchmesser<br />
δ in einen Ball von Durchmesser δ hineinpasst.<br />
Somit ändert sich N bei Übergang zu N 2 , N 3 oder N 4 höchstens um<br />
eine (von δ unabhängige) multiplikative Konstante <strong>und</strong> log N höchstens<br />
um eine additive. Also hat<br />
log N(δ)<br />
− log δ<br />
nach diesem Übergang denselben oberen <strong>und</strong> unteren Grenzwert.<br />
Es gibt noch weitere mögliche Modifikationen: Die Bälle oder Würfel<br />
können offen oder abgeschlossen gewählt werden usw. Wir haben bislang<br />
genug Definitionen.<br />
Bemerkung 4.4.0.54 Definition (N 2 ) ist für maschinelle Auswertung geeignet:<br />
Ein Computer kann für endlich viele Werte von δ (z.B. für einen einzigen Wert<br />
δ 0 ) N 2 (δ) bestimmen <strong>und</strong> somit<br />
als Näherung der Dimension.<br />
log N(δ 0 )<br />
− log δ 0
Literaturverzeichnis<br />
[1] Brockhaus Enzyklopädie in 24 Bänden. F.A. Brockhaus, Mannheim, 19.te<br />
Auflage, 1986.<br />
[2] R. ABRAHAM & J. W. ROBBIN. Transversal Mappings and Flows. Benjamin,<br />
New York, 1967.<br />
[3] H. AMANN. <strong>Gew</strong>öhnliche <strong>Differentialgleichungen</strong>. de Gruyter, Berlin<br />
New York, 1995.<br />
[4] V. ARNOLD. <strong>Gew</strong>öhnliche <strong>Differentialgleichungen</strong>. VEB Deutscher Verlag<br />
der Wissenschaften, Berlin, 1979.<br />
[5] T. BRÖCKER & K. JÄNICH. Differentialtopologie, Heidelberger Taschenbücher<br />
98. Springer Verlag, 1973.<br />
[6] M. DENKER. Einführung in die Analysis dynamischer <strong>Systeme</strong>. Springer<br />
Verlag, 2005.<br />
[7] R. DEVANEY. An Introduction to Chaotic Dynamical Systems. Addison-<br />
Wesley, New York, 1989.<br />
[8] S. Gottwald, H.-J. Ilgauds & K.-H. Schlote, editors. Lexikon bedeutender<br />
Mathematiker. Verlag Harri Deutsch, Leipzig, Thun, 1990.<br />
[9] R. GUNESCH. Einführung in <strong>Dynamische</strong> <strong>Systeme</strong>. Vorlesung, Universität<br />
Hamburg, 2004.<br />
[10] R. GUNESCH. <strong>Gew</strong>öhnliche <strong>Differentialgleichungen</strong>. Vorlesung, Universität<br />
Hamburg, 2006.<br />
[11] J. K. HALE. Ordinary Differential Equations. John Wiley & Sons, Coorp,<br />
1969.<br />
93
94 LITERATURVERZEICHNIS<br />
[12] P. HARTMAN. Ordinary Differential Equations. John Wiley & Sons,<br />
Coorp., 1964.<br />
[13] B. HASSELBLATT & A. KATOK. A First Course in Dynamics with a Panorama<br />
of Recent Developments. Cambridge Univ. Press, 2003.<br />
[14] H. HEUSER. <strong>Gew</strong>öhnliche <strong>Differentialgleichungen</strong>. B. G. Teubner, 1979.<br />
[15] A. KATOK & B. HASSELBLATT. Introduction to the Modern Theory of<br />
Dynamical Systems, Encycl. Math. Appl. 54. Cambridge Univ. Press,<br />
1995.<br />
[16] H.-W. KNOBLOCH & F. KAPPEL. <strong>Gew</strong>öhnliche <strong>Differentialgleichungen</strong>.<br />
Teubner, 1974.<br />
[17] R. LAUTERBACH. <strong>Gew</strong>öhnliche <strong>Differentialgleichungen</strong>. Skript<br />
zur Vorlesung, Universität Hamburg, 1999. http://www.math.unihamburg/lauterbach/scripts/ode.html.<br />
[18] J. PALIS,JR. & W. DE MELO. Geometric Theory of Dynamical Systems.<br />
Springer Verlag, New York, 1982.<br />
[19] W. WALTER. <strong>Gew</strong>öhnliche <strong>Differentialgleichungen</strong>, Heidelberger Taschenbücher.<br />
Heidelberger Taschenbücher. Springer Verlag, Berlin,<br />
1972.<br />
[20] F. W. WARNER. Fo<strong>und</strong>ations of Differentiable Manifolds and Lie Groups.<br />
Scott Foresman and Company, Glenview, IL, 1971.