Laborprojekt (1)
Laborprojekt (1)
Laborprojekt (1)

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Laborprojekt</strong> (1)<br />
Vorbemerkungen<br />
• Vorlesungen: Überblick und ausgewählte Themen aus der Robotik<br />
• <strong>Laborprojekt</strong> ergänzt Vorlesungen<br />
• Punktuelle theoretische Grundlagen (abhängig vom Projekt)<br />
• Erfahrungen zur Implementierung mit üblichen Programmiersprachen<br />
wird vorausgesetzt<br />
• Ziel der Übung:<br />
– Bewegung und Manipulation von Objekten<br />
– Erfahrung mit eingebetteten Systemen, Echtzeitsteuerung und<br />
beschränkten Ressourcen<br />
– Sensorinformationsverarbeitung<br />
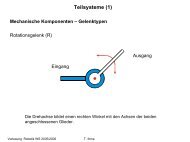
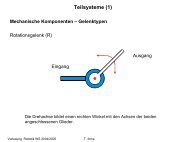
– Betrachtung Mechatronisches System (Gesamtheit aus<br />
Mechanik, Elektronik, Informatik)<br />
– Softwarearchitekturen in der Robotik<br />
– Einbeziehung verschiedener Teilaspekte aus der Informatik<br />
Vorlesung Robotik WS 2012<br />
T. Ihme
<strong>Laborprojekt</strong> (3)<br />
Master-Studiengang<br />
Projektaufgaben Robocup@Home<br />
• Teilaufgaben aus dem Bereich des Wettbewerbs<br />
• Folgende Projekte sind Schwerpunkte, andere Aufgaben möglich<br />
• Greifmanipulation<br />
Es steht ein Katana-Greifarm zur Verfügung, der sowohl angesteuert<br />
als auch mit OpenRAVE verknüpft werden muss. Anschließend soll<br />
das Greifen von Objekten, die durch eine Kinect erkannt werden,<br />
ermöglicht werden.<br />
• Sprachsteuerung<br />
Da die derzeitige Sprachsteuerung nicht sehr ausgereift ist, wird diese<br />
demnächst durch VoiceXML ersetzt. Hierbei soll sowohl die<br />
Sprachausgabe als auch die Spracheingabe sowie das Verstehen von<br />
Kommandos eingebunden werden. Fortführend soll die Nutzung von<br />
VoiceXML in ROS integriert werden..<br />
Vorlesung Robotik WS 2012<br />
T. Ihme
<strong>Laborprojekt</strong> (3)<br />
Master-Studiengang<br />
• Autonomität<br />
Um eine vernünftige Autonomität zu gewährleisten, sollen alle<br />
Funktionen in eine State Machine eingebunden werden.<br />
• Hardwaredesign<br />
Der Wettbewerb schreibt bestimmte Rahmenbedingungen vor, die<br />
vom Roboter eingehalten werden müssen. Die Möglichkeiten unseres<br />
Roboters sollen optimal unterstützt und alle notwendigen<br />
Komponenten (Rechner, Kamera, Laserscanner, Akku etc.) integriert<br />
werden.<br />
• Aufgaben aus dem Szenarium<br />
Personen erkennen, Gegenstände finden, navigieren …<br />
Vorlesung Robotik WS 2012<br />
T. Ihme