Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...
Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...
Modellierung und Validierung der Krafterzeugung mit Stick-Slip ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
2.2. <strong>Stick</strong>-<strong>Slip</strong>-Robotik zur Nanohandhabung 9<br />
Bauform<br />
Auslenkung<br />
bei 100V<br />
max.<br />
Kraft<br />
Vorteile<br />
Nachteile<br />
Bulk-<br />
Keramik<br />
50nm 520N große Kraft geringe Auslenkung<br />
Bulk-<br />
Keramik<br />
strukturiert<br />
50nm<br />
520N<br />
kleinere<br />
Aktoren<br />
geringe<br />
Auslenkung, hoher<br />
Fertigungsaufwand<br />
Biegeaktor 1mm 0, 1N<br />
größte<br />
Auslenkung<br />
geringe Kraft<br />
(vibrationsanfällig)<br />
Stapelaktor<br />
(Stack)<br />
10µm 50N<br />
große<br />
Auslenkung<br />
hoher<br />
Fertigungsaufwand<br />
An<strong>der</strong>e<br />
(Fasern)<br />
k.A.<br />
k.A.<br />
freie<br />
Formbarkeit<br />
hoher<br />
Fertigungsaufwand<br />
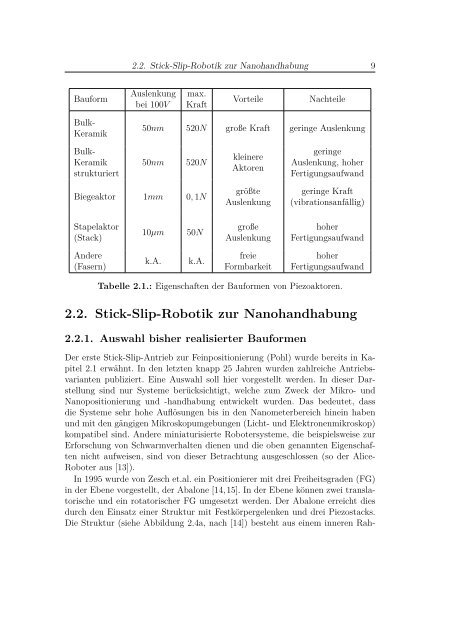
Tabelle 2.1.: Eigenschaften <strong>der</strong> Bauformen von Piezoaktoren.<br />
2.2. <strong>Stick</strong>-<strong>Slip</strong>-Robotik zur Nanohandhabung<br />
2.2.1. Auswahl bisher realisierter Bauformen<br />
Der erste <strong>Stick</strong>-<strong>Slip</strong>-Antrieb zur Feinpositionierung (Pohl) wurde bereits in Kapitel<br />
2.1 erwähnt. In den letzten knapp 25 Jahren wurden zahlreiche Antriebsvarianten<br />
publiziert. Eine Auswahl soll hier vorgestellt werden. In dieser Darstellung<br />
sind nur Systeme berücksichtigt, welche zum Zweck <strong>der</strong> Mikro- <strong>und</strong><br />
Nanopositionierung <strong>und</strong> -handhabung entwickelt wurden. Das bedeutet, dass<br />
die Systeme sehr hohe Auflösungen bis in den Nanometerbereich hinein haben<br />
<strong>und</strong> <strong>mit</strong> den gängigen Mikroskopumgebungen (Licht- <strong>und</strong> Elektronenmikroskop)<br />
kompatibel sind. An<strong>der</strong>e miniaturisierte Robotersysteme, die beispielsweise zur<br />
Erforschung von Schwarmverhalten dienen <strong>und</strong> die oben genannten Eigenschaften<br />
nicht aufweisen, sind von dieser Betrachtung ausgeschlossen (so <strong>der</strong> Alice-<br />
Roboter aus [13]).<br />
In 1995 wurde von Zesch et.al. ein Positionierer <strong>mit</strong> drei Freiheitsgraden (FG)<br />
in <strong>der</strong> Ebene vorgestellt, <strong>der</strong> Abalone [14,15]. In <strong>der</strong> Ebene können zwei translatorische<br />
<strong>und</strong> ein rotatorischer FG umgesetzt werden. Der Abalone erreicht dies<br />
durch den Einsatz einer Struktur <strong>mit</strong> Festkörpergelenken <strong>und</strong> drei Piezostacks.<br />
Die Struktur (siehe Abbildung 2.4a, nach [14]) besteht aus einem inneren Rah-