

KUKA Posiflex - KUKA Robotics
KUKA Posiflex - KUKA Robotics
KUKA Posiflex - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>KUKA</strong> <strong>Posiflex</strong><br />
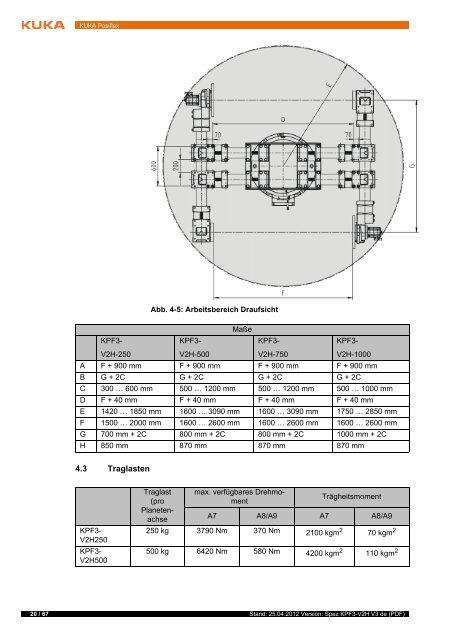
Abb. 4-5: Arbeitsbereich Draufsicht<br />
Maße<br />
KPF3-<br />
V2H-250<br />
KPF3-<br />
V2H-500<br />
KPF3-<br />
V2H-750<br />
KPF3-<br />
V2H-1000<br />
A F + 900 mm F + 900 mm F + 900 mm F + 900 mm<br />
B G + 2C G + 2C G + 2C G + 2C<br />
C 300 … 600 mm 500 … 1200 mm 500 … 1200 mm 500 … 1000 mm<br />
D F + 40 mm F + 40 mm F + 40 mm F + 40 mm<br />
E 1420 … 1850 mm 1600 … 3090 mm 1600 … 3090 mm 1750 … 2850 mm<br />
F 1500 … 2000 mm 1600 … 2600 mm 1600 … 2600 mm 1600 … 2600 mm<br />
G 700 mm + 2C 800 mm + 2C 800 mm + 2C 1000 mm + 2C<br />
H 850 mm 870 mm 870 mm 870 mm<br />
4.3 Traglasten<br />
max. verfügbares Drehmoment<br />
KPF3-<br />
V2H250<br />
KPF3-<br />
V2H500<br />
Traglast<br />
(pro<br />
Planetenachse<br />
Trägheitsmoment<br />
A7 A8/A9 A7 A8/A9<br />
250 kg 3790 Nm 370 Nm 2100 kgm 2 70 kgm 2<br />
500 kg 6420 Nm 580 Nm 4200 kgm 2 110 kgm 2<br />
20 / 67 Stand: 25.04.2012 Version: Spez KPF3-V2H V3 de (PDF)














