Datasheet NAO Next Gen - H21/H25 Model ... - Austro-Tec GmbH
Datasheet NAO Next Gen - H21/H25 Model ... - Austro-Tec GmbH
Datasheet NAO Next Gen - H21/H25 Model ... - Austro-Tec GmbH

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
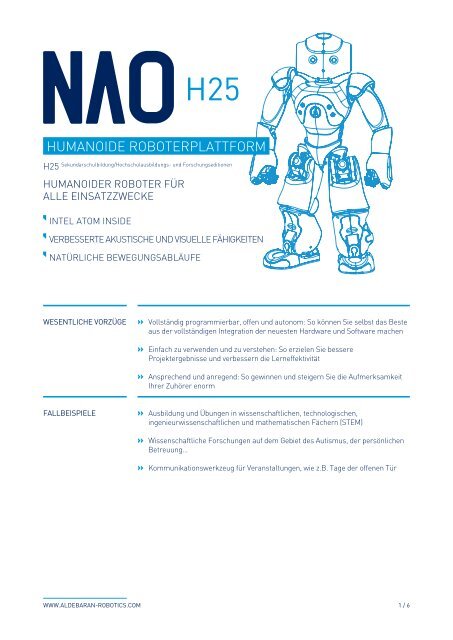
<strong>H25</strong><br />
Humanoide Roboterplattform<br />
<strong>H25</strong><br />
Sekundarschulbildung/Hochschulausbildungs- und Forschungseditionen<br />
Humanoider Roboter für<br />
alle Einsatzzwecke<br />
Intel ATOM Inside<br />
Verbesserte akustische und visuelle Fähigkeiten<br />
natürliche Bewegungsabläufe<br />
Wesentliche Vorzüge<br />
»<br />
»<br />
»<br />
Vollständig programmierbar, offen und autonom: So können Sie selbst das Beste<br />
aus der vollständigen Integration der neuesten Hardware und Software machen<br />
Einfach zu verwenden und zu verstehen: So erzielen Sie bessere<br />
Projektergebnisse und verbessern die Lerneffektivität<br />
Ansprechend und anregend: So gewinnen und steigern Sie die Aufmerksamkeit<br />
Ihrer Zuhörer enorm<br />
Fallbeispiele<br />
»<br />
»<br />
»<br />
Ausbildung und Übungen in wissenschaftlichen, technologischen,<br />
ingenieurwissenschaftlichen und mathematischen Fächern (STEM)<br />
Wissenschaftliche Forschungen auf dem Gebiet des Autismus, der persönlichen<br />
Betreuung…<br />
Kommunikationswerkzeug für Veranstaltungen, wie z.B. Tage der offenen Tür<br />
www.aldebaran-robotics.com 1 / 6
<strong>H25</strong><br />
Verbesserte akustische und visuelle Fähigkeiten<br />
» »<br />
»<br />
Kamera<br />
Dank verbesserter Kamerasensoren besteht<br />
eine höhere VGA-Sensibilität für ein besseres<br />
Wahrnehmungsvermögen bei schlechten<br />
Lichtverhältnissen. Bei Bildbearbeitungsmaßnahmen an<br />
der CPU des Roboters können Sie mit bis zu 30 Bildern<br />
pro Sekunde in HD-Auflösung arbeiten. <strong>NAO</strong> kann seinen<br />
Kopf horizontal um 239 ° und vertikal um 68 ° bewegen,<br />
und seine Kamera kann horizontal 61 ° und vertikal<br />
47 ° weit sehen. Ergebnis: <strong>NAO</strong> verfügt über großartige<br />
Fähigkeiten zur Erkennung seiner Umgebung.<br />
Objekterkennung<br />
<strong>NAO</strong> hat die Fähigkeit, eine große Menge an Objekten<br />
zu erkennen. Wenn das Objekt dank der Choregraphe-<br />
Software erst einmal erkannt ist, ist <strong>NAO</strong> in der Lage,<br />
das Objekt wiederzuerkennen, wenn er es erneut sieht,<br />
und zu sagen, worum es sich handelt.<br />
» »<br />
Gesichtswahrnehmung und -erkennung<br />
Dies ist eines der bekanntesten Interaktionsmerkmale.<br />
<strong>NAO</strong> kann ein Gesicht erkennen und sich einprägen,<br />
um es beim nächsten Mal wiederzuerkennen.<br />
»<br />
Texte aussprechen<br />
<strong>NAO</strong> kann bis zu 9 Sprachen sprechen. Mittels einer<br />
„Sprachbox“ in der Choregraphe-Software können Sie<br />
Texte einfügen und die Stimmparameter nach Ihren<br />
Wünschen ändern. <strong>NAO</strong> wird den Text mit der richtigen<br />
Interpunktion und Intonation korrekt wiedergeben.<br />
Automatische Spracherkennung<br />
Spracherkennung ist das Kernstück intuitiver<br />
Interaktion zwischen Mensch und Roboter.<br />
Deshalb haben wir uns entschlossen, mit Nuance<br />
zusammenzuarbeiten, dem besten <strong>Tec</strong>hnologiepartner<br />
auf diesem Gebiet, um eine stabile und leistungsstarke<br />
Spracherkennung zu entwickeln. <strong>NAO</strong> ist nun in der<br />
Lage, Sie aus 2 Metern Abstand zu hören und einen<br />
vollständigen Satz oder auch nur wenige Worte in<br />
einem Satz zu erkennen. Das Ergebnis: fließendere und<br />
natürlichere Konversation.<br />
Geräuscherkennung und -verortung<br />
Unsere Umwelt besteht aus Geräuschen, die <strong>NAO</strong> dank<br />
der nach allen Richtungen ausgerichteten Mikrofone<br />
in seinem Kopf, genau wie wir selbst, erkennen und im<br />
Raum verorten kann.<br />
Natürliche Bewegungsabläufe<br />
»<br />
Intelligente Steifigkeit<br />
Ein einzigartiges Merkmal, das die von den Motoren<br />
für die Bewegungen des Roboters benötigte Energie<br />
automatisch regelt. Ergebnis: bessere Nutzung der<br />
Antriebskomponenten sowie Energieeinsparungen für<br />
den Akku.<br />
»<br />
Selbstkollisionsschutz<br />
Dieses Bewegungsmerkmal verhindert, dass <strong>NAO</strong>s Arme<br />
mit dem Rest seines Körpers kollidieren. <strong>NAO</strong> ist sich<br />
stets der Position seines Kopfes, seines Torsos, seiner<br />
Arme und Beine bewusst: Er vermeidet zufällige und<br />
ungewollte Kollisionen seiner Extremitäten.<br />
»<br />
Sturz-Manager<br />
<strong>NAO</strong> kann hinfallen, aber wir haben ihm beigebracht,<br />
wie er wieder alleine aufstehen kann. Wir sind sogar<br />
noch weitergegangen und haben ihn mit einem<br />
Sturzerkennungssystem ausgestattet: Bevor er den<br />
Boden berührt, schützt sich <strong>NAO</strong> mit seinen Armen.<br />
»<br />
Ressourcen-Manager<br />
Die größte Herausforderung für <strong>NAO</strong> ist, sich<br />
widersprechende Befehle in Einklang zu bringen<br />
und zu ordnen. Er ist in der Lage, einen sich im Gang<br />
befindlichen Verhaltensablauf zu unterbrechen/<br />
zu stoppen bzw. anzupassen, bevor er einen neuen,<br />
erforderlichen Verhaltensbefehl ausführt<br />
www.aldebaran-robotics.com 2 / 6
<strong>H25</strong><br />
Anwendungsbeispiele<br />
Forschung<br />
Unterricht<br />
»<br />
Interaktion zwischen Mensch und Roboter<br />
»<br />
Programmierung<br />
»<br />
»<br />
Wahrnehmung & Erkennen<br />
Objektkategorie Erkennung &<br />
Wahrnehmung<br />
»<br />
»<br />
Mathematik- & Physikkonzepte für<br />
Robotikanwendungen<br />
Bewegungsplanung<br />
»<br />
»<br />
»<br />
»<br />
»<br />
<strong>Model</strong>lierung ausdrucksstarker Gesten<br />
Lokalisation & Navigation<br />
Bewegungssynchronisierung des Roboters<br />
Struktur- & Bewegungsanalyse<br />
Psychologie & soziale Robotik<br />
»<br />
»<br />
»<br />
»<br />
Einführung in die Objekt- bzw.<br />
Sprachwahrnehmung und -erkennung<br />
Erfinden von Spielen und Geschichten<br />
Mechatronik<br />
Automation<br />
»<br />
Künstliche Intelligenz<br />
Referenzen Europa Nordamerika<br />
ASIEN<br />
» Universität Paris Descartes » Massachusetts Institute<br />
» Universität Tokio<br />
» Universität Bremen<br />
of <strong>Tec</strong>hnology<br />
» Universität Shanghai Jiao Tong<br />
» Universität Hertfordshire » Harvard University<br />
» Nationaluniversität Seoul<br />
» Universität Jaume<br />
» Carnegie Mellon University » Nationaluniversität Taiwan<br />
»<br />
»<br />
Wissenschaftsmuseum in London<br />
<strong>Tec</strong>hnische Hochschule Nîmes<br />
»<br />
»<br />
University of Texas, Austin<br />
Wissenschaftsmuseum in Chicago<br />
»<br />
»<br />
New South Wales University<br />
Wissenschaftsmuseum in Shanghai<br />
» High School Central <strong>Tec</strong>h Erie<br />
www.aldebaran-robotics.com 3 / 6
<strong>H25</strong><br />
TECHNISCHE DATEN<br />
Elektrik<br />
Bauweise<br />
Eingangsspannung<br />
Ausgangsspannung<br />
Akku<br />
100 bis 240 V Wechselspannung - 50/60 Hz - max. 2 A<br />
25,2 VDC - 2 A<br />
Typ<br />
Lithium-Ionen<br />
Nennspannung/-kapazität 21,6 V/1,28 Ah<br />
Maximale Ladungsspannung 24,9 V<br />
Empfohlener Ladestrom<br />
1,28 A<br />
Maximaler Lade- bzw. Entladestrom 3,0 A/2,0 A<br />
Energie<br />
27,6 Wh<br />
Ladedauer<br />
2 h<br />
Autonomie 60 Min. (Aktive Verwendung)<br />
90 Min. (Normale Verwendung)<br />
MaSSe (H×T×B) 573×275×311 mm/22,5x10,8x12,2 Zoll<br />
Gewicht<br />
5,2 kg/11,4 lb<br />
Baumaterial<br />
ABS-PC/PA-66/XCF-30<br />
SPRACHEN<br />
Texte aussprechen Englisch, Französisch, Spanisch,<br />
Deutsch, Italienisch, Chinesisch,<br />
Japanisch, Koreanisch, Portugiesisch<br />
Automatische Englisch, Französisch, Spanisch, Deutsch,<br />
Spracherkennung Italienisch, Chinesisch, Japanisch, Koreanisch<br />
Motherboard<br />
Sehvermögen<br />
CPU-Prozessor<br />
RAM<br />
Flash-Speicher<br />
Micro SDHC<br />
ATOM Z530<br />
Cache-Speicher<br />
Taktfrequenz<br />
FSB-Frequenz<br />
1 GB<br />
2 GB<br />
8 GB<br />
512 KB<br />
1,6 GHz<br />
533 MHz<br />
Kameras<br />
Sensormodell<br />
Sensortyp<br />
Bildfeldanordnung<br />
×2 vorne<br />
MT9M114<br />
SOC-Bildsensor<br />
Auflösung<br />
Optisches Format<br />
Aktive Pixel (H×V)<br />
1,22 MP<br />
1/6 Zoll<br />
1288×968<br />
Verbindung<br />
Ethernet<br />
WIFI<br />
1×RJ45 - 10/100/1000 Base-T<br />
IEEE 802,11 b/g<br />
Sensibilität<br />
Pixelgröße<br />
1,9 µm<br />
Dynamischer Bereich<br />
70 dB<br />
Signal/Geräuschverhältnis (max.) 37 dB<br />
Ansprechempfindlichkeit 2,24 V/Lux-Sek. (960p)<br />
8,96 V/Lux-Sek. (VGA)<br />
Akustik<br />
Lautsprecher<br />
Mikrofon<br />
×2 seitlich<br />
Durchmesser<br />
36 mm<br />
Impedanz<br />
8 Ohm<br />
SP-Level<br />
87 dB/w +/- 3 dB<br />
Frequenzbereich bis zu ~20 kHz<br />
Eingang<br />
2 W<br />
×4 am Kopf<br />
Sensibilität<br />
~40 +/-3 dB<br />
Frequenzbereich 20 Hz - 20 kHz<br />
Signal/Geräuschverhältnis 58 dBA<br />
Leistung Kameraleistung<br />
960p@30fps<br />
Datenformat<br />
YUV422<br />
Verschlusstyp ERS (Electronic Rolling Shutter)<br />
Betrachtung Gesichtsfeld 72,6° DFOV (60,9°HFOV, 47,6° VFOV)<br />
Fokusbereich<br />
30 cm ~ unendlich<br />
Fokustyp<br />
Fixfokus<br />
Framerate<br />
Auflösung Eingebettet Gigabit Ethernet 100 MB Ethernet WIFI g<br />
160×120 px 30 fps 30 fps 30 fps 30 fps<br />
320×240 px 30 fps 30 fps 30 fps 11 fps<br />
640×480 px 30 fps 30 fps 12 fps 2,5 fps<br />
1280×960 px 29 fps 10 fps 3 fps 0,5 fps<br />
Hinweis: Die Verwendung von Video-Streaming über Fernzugriff hängt in<br />
hohem Maße vom gewählten Netz und der gewählten Videoauflösung ab.<br />
Alle Framerates sind von der CPU-Nutzung abhängig. Die berechneten<br />
www.aldebaran-robotics.com Werte beruhen auf einer CPU, die vollständig auf Bildbearbeitung<br />
ausgelegt ist.<br />
4 / 6
<strong>H25</strong><br />
TECHNISCHE DATEN<br />
ir<br />
Sonar<br />
Nummer<br />
Wellenlänge<br />
Emissionswinkel<br />
Leistung<br />
×2 vorne<br />
940 nm<br />
+/- 60 °<br />
8 mW/sr<br />
Sender<br />
Empfänger<br />
Frequenz<br />
Sensibilität<br />
Auflösung<br />
Erkennungsbereich<br />
effektiver Konus<br />
×2 vorne<br />
×2 vorne<br />
40 kHz<br />
-86 dB<br />
1 cm<br />
0,25 m bis 2,55 m<br />
60 °<br />
Trägheitsmesssystem<br />
fsr (kraftempfindliche Widerstände)<br />
Gyrometer<br />
Beschleunigungsmesser<br />
×2<br />
Achse<br />
Präzision<br />
Winkelgeschwindigkeit<br />
×1<br />
Achse<br />
Präzision<br />
Beschleunigung<br />
1 pro Gyrometer<br />
5 %<br />
~500 °/s<br />
3<br />
1 %<br />
~2 g<br />
Bereich<br />
0 bis 110 N<br />
×4 pro Fuß<br />
Positionssensoren<br />
h25<br />
MRE (Magnetischer ×36<br />
Drehgeber)) Verwendung der Hall-Effekt-Sensortechnologie<br />
Präzision:<br />
12 Bits/0,1 °<br />
Software<br />
LEDs<br />
Offener <strong>NAO</strong><br />
Architektur<br />
Programmierung<br />
GNU/Linux eingebettet<br />
Distribution auf <strong>Gen</strong>too basierend<br />
×86<br />
Eingebettet: C++/Python<br />
Fernzugriff: C++/Python/.NET/Java/MatLab<br />
Platzierung Menge Beschreibung<br />
Taktiler Kopf<br />
Augen<br />
Ohren<br />
Brusttaste<br />
Füße<br />
×12<br />
2×8<br />
2×10<br />
×1<br />
2×1<br />
16 Blaustufen<br />
RGB FullColor<br />
16 Blaustufen<br />
RGB FullColor<br />
RGB FullColor<br />
Kontaktsensor<br />
Freiheitsgrade<br />
Brusttaste<br />
Fußstoßleiste<br />
Taktiler Kopf*<br />
Taktile Hand<br />
h25<br />
<br />
<br />
<br />
<br />
Kopf<br />
Arm (jeweils)<br />
Becken<br />
Bein (jeweils)<br />
Hand (jeweils)<br />
h25<br />
×2 Freiheitsgrade<br />
×5 Freiheitsgrade<br />
×1 Freiheitsgrad<br />
×5 Freiheitsgrade<br />
×1 Freiheitsgrad<br />
www.aldebaran-robotics.com 5 / 6
<strong>H25</strong><br />
Motor-DATEN<br />
Motortyp DC-Bürstenmotor, kernlos<br />
Position der Motoren<br />
Kopfgelenke<br />
Armgelenke<br />
Motor<br />
HeadYaw Typ 3<br />
HeadPitch Typ 3<br />
ShoulderPitch Typ 3<br />
ShoulderRoll Typ 3<br />
ElbowYaw Typ 3<br />
ElbowRoll Typ 3<br />
WristYaw Typ 2<br />
Hand<br />
Typ 2<br />
Reduktionsverhältnis<br />
Typ A<br />
Typ B<br />
Typ A<br />
Typ B<br />
Typ A<br />
Typ B<br />
Typ C<br />
Typ D<br />
HeadYaw[3][A]<br />
HeadPitch[3][B]<br />
ShoulderPitch[3][A]<br />
ShoulderRoll[3][B]<br />
ElbowYaw[3][A]<br />
ElbowRoll[3][B]<br />
HipYawPitch[1][A]<br />
WristYaw[2][C]<br />
Hand [2][D]<br />
Beingelenke HipYawPitch Typ 1<br />
HipRoll Typ 1<br />
HipPitch Typ 1<br />
KneePitch Typ 1<br />
AnklePitch Typ 1<br />
AnkleRoll Typ 1<br />
Beschreibung der Motoren<br />
Typ A<br />
Typ A<br />
Typ B<br />
Typ B<br />
Typ B<br />
Typ A<br />
HipRoll[1][A]<br />
HipPitch[1][B]<br />
KneePitch[1][B]<br />
AnklePitch[1][B]<br />
AnkleRoll[1][A]<br />
<strong>Model</strong>l<br />
Keine Lastdrehzahl<br />
Kippdrehmoment<br />
Dauerdrehmoment<br />
Motortyp 1<br />
22NT82213P<br />
8300 1/min ± 10 %<br />
68 mNm ± 8 %<br />
16,1 mNm max.<br />
Motortyp 2 Motortyp 3<br />
17N88208E 16GT83210E<br />
8400 1/min ± 12 % 10700 1/min ± 10 %<br />
9,4 mNm ± 8 % 14,3 mNm ± 8 %<br />
4.9mNm max 6,2 mNm max.<br />
Legende: Gelenkname [Motortyp] [Reduktionstyp]<br />
Geschwindigkeitsreduktionsverhältnis<br />
Typ A<br />
Geschwindigkeitsreduktionsverhältnis<br />
Typ B<br />
Motortyp 1 Motortyp 3 Motortyp 1 Motortyp 3<br />
Reduktionsverhältnis 201.3<br />
150.27 Reduktionsverhältnis 130.85<br />
173.22<br />
Geschwindigkeitsreduktionsverhältnis<br />
Typ C<br />
Motortyp 2<br />
Reduktionsverhältnis 50.61<br />
Geschwindigkeitsreduktionsverhältnis<br />
Typ D<br />
Motortyp 2<br />
Reduktionsverhältnis 36.24<br />
Zulassungen & Freigaben<br />
Gebiet<br />
Europa<br />
USA<br />
Klassifizierung<br />
CE (Konformitätserklärung)<br />
FCC<br />
Elektromagnetische Verträglichkeit<br />
Sicherheit<br />
EN 301 489-1/EN 301 489-17/EN 300 328 EN 62311:<br />
2008/FCC PART15, Class A<br />
IEC 60950-1:2005 (2. Ausgabe)<br />
www.aldebaran-robotics.com 6 / 6<br />
©2011/2012 Aldebaran Robotics. Dezember 2011.<br />
Änderungen der technischen Daten bleiben vorbehalten.