

Deutsche Anleitung - mapl-connect
Deutsche Anleitung - mapl-connect
Deutsche Anleitung - mapl-connect
- Keine Tags gefunden...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
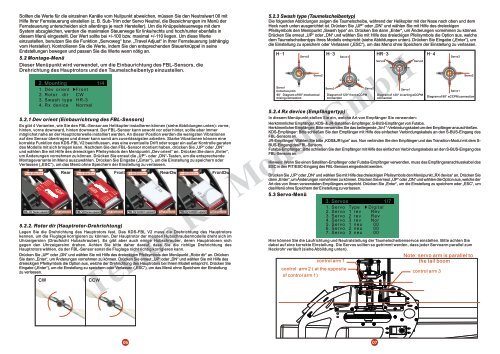
Sollten die Werte für die einzelnen Kanäle vom Nullpunkt abweichen, müssen Sie den Neutralwert 00 mitHilfe Ihrer Fernsteuerung einstellen (z. B. Sub-Trim oder Servo Neutral, die Bezeichnungen im Menü derFernsteuerung unterscheiden sich allerdings je nach Hersteller). Um die Knüppelsteuerwege mit demSystem abzugleichen, werden die maximalen Steuerwege für links/rechts und hoch/runter ebenfalls indiesem Menü eingestellt. Der Wert sollte bei +/-100 bzw. maximal +/-110 liegen. Um diese Werteeinzustellen, benutzen Sie die Funktion „Servoweg“ bzw. „Travel Adjust“ in Ihrer Fernsteuerung (abhängigvom Hersteller). Kontrollieren Sie die Werte, indem Sie den entsprechenden Steuerknüppel in seineEndstellungen bewegen und passen Sie die Werte wenn nötig an.5.2 Montage-MenüDieser Menüpunkt wird verwendet, um die Einbaurichtung des FBL-Sensors, dieDrehrichtung des Hauptrotors und den Taumelscheibentyp einzustellen.2. Mounting 1/41. Dev orient Front2. Rotor dir CW3. Swash type HR-34. Rx device Normal5.2.1 Dev orient (Einbaurichtung des FBL-Sensors)Es gibt 4 Varianten, wie Sie den FBL-Sensor am Helikopter installieren können (siehe Abbildungen unten): vorne,hinten, vorne downward, hinten downward. Der FBL-Sensor kann sowohl vor oder hinter, sollte aber immermöglichst nahe an der Hauptrotorwelle installiert werden. An dieser Position werden die wenigsten Vibrationenauf den Sensor übertragen und dieser kann somit am zuverlässigsten arbeiten. Starke Vibrationen können einekorrekte Funktion des KDS-FBL V2 beeinflussen, was eine eventuelle Drift oder sogar ein außer Kontrolle geratendes Modells mit sich bringen kann. Nachdem Sie den FBL-Sensor montiert haben, drücken Sie „UP“ oder „DN“und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Dev orient“ an. Drücken Sie dann „Enter“,um Änderungen vornehmen zu können. Drücken Sie erneut die „UP“- oder „DN“-Tasten, um die entsprechendeMontagevariante im Menü auszuwählen. Drücken Sie Eingabe („Enter“), um die Einstellung zu speichern oderVerlassen („ESC“), um das Menü ohne Speichern der Einstellung zu verlassen.Nose direction Rear Nose direction Front Nose direction RearDw Nose direction FrontDwFBL V2 faces upward5.2.2. Rotor dir (Hauptrotor-Drehrichtung)Legen Sie die Drehrichtung des Hauptrotors fest. Das KDS-FBL V2 muss die Drehrichtung des Hauptrotorskennen, um die Fluglage korrigieren zu können. Der Hauptrotor der meisten Hubschraubermodelle dreht sich imUhrzeigersinn (Draufsicht Hubschrauber). Es gibt aber auch einige Hubschrauber, deren Hauptrotoren sichgegen den Uhrzeigersinn drehen. Achten Sie bitte daher darauf, dass Sie die richtige Drehrichtung desHauptrotors wählen, da der FBL-Sensor sonst die Fluglage nicht richtig korrigieren kann.Drücken Sie „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „Rotor dir“ an. DrückenSie dann „Enter“, um Änderungen vornehmen zu können. Drücken Sie erneut „UP“ oder „DN“ und wählen Sie mit Hilfe desdreieckigen Pfeilsymbols die Option aus, welche der Drehrichtung des Hauptrotors bei Ihrem Modell entspricht. Drücken SieEingabe („Enter“), um die Einstellung zu speichern oder Verlassen („ESC“), um das Menü ohne Speichern der Einstellungzu verlassen.CWTail direction FBL V2 faces upward Tail direction FBL V2 bottom upward Tail direction FBL V2 bottom upward Tail directionCCW5.2.3 Swash type (Taumelscheibentyp)Die folgenden Abbildungen zeigen die Taumelscheibe, während der Helikopter mit der Nase nach oben und demHeck nach unten ausgerichtet ist. Drücken Sie „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigenPfeilsymbols den Menüpunkt „Swash type“ an. Drücken Sie dann „Enter“, um Änderungen vornehmen zu können.Drücken Sie erneut „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols die Option aus, welchedem Taumelscheibentyps Ihres Modells entspricht (siehe Abbildungen unten). Drücken Sie Eingabe („Enter“), umdie Einstellung zu speichern oder Verlassen („ESC“), um das Menü ohne Speichern der Einstellung zu verlassen.H-1Servo3Servo2Servo1Collective pitch90°Diagram of 90° mechanicalmixing <strong>connect</strong>ionH-3Servo3Servo1Diagram of 120° front eCCPM<strong>connect</strong>ion5.2.4 Rx device (Empfängertyp)In diesem Menüpunkt stellen Sie ein, welche Art von Empfänger Sie verwenden:Herkömmlicher Empfänger, KDS- & JR-Satelliten-Empfänger, S-BUS-Empfänger von Futaba.Herkömmlicher Empfänger: Bitte verwenden Sie das beiliegende „3in1“-Verbindungskabel um den Empfänger anzuschließen.KDS-Empfänger: Bitte schließen Sie den Empfänger mit Hilfe des einfachen Verbindungskabels an den S-BUS-Eingang desFBL-Sensors an.JR-Empfänger: Wählen Sie bitte „KDS&JR type“ aus. Nun verbinden Sie den Empfänger und das Transition-Modul mit dem S-BUS-Eingang des FBL-Sensors.Futaba-Empfänger: Bitte schließen Sie den Empfänger mit Hilfe des einfachen Verbindungskabels an den S-BUS-Eingang desFBL-Sensors an.Hinweis: Wenn Sie einen Satelliten-Empfänger oder Futaba-Empfänger verwenden, muss das Empfängeranschlusskabel desESC in den PIT/ESC-Eingang des FBL-Sensors eingesteckt werden.Drücken Sie „UP“ oder „DN“ und wählen Sie mit Hilfe des dreieckigen Pfeilsymbols den Menüpunkt „RX device“ an. Drücken Siedann „Enter“, um Änderungen vornehmen zu können. Drücken Sie erneut „UP“ oder „DN“ und wählen die Option aus, welche derArt des von Ihnen verwendeten Empfängers entspricht. Drücken Sie „Enter“, um die Einstellung zu speichern oder „ESC“, umdas Menü ohne Speichern der Einstellung zu verlassen.5.3 Servo-Menü3. Servos 1/71. Servo Type Digital2. Servo 1 rev Rev3. Servo 2 rev Rev4. Servo 3 rev Nor5. Servo 1 neu 006. Servo 2 neu 007. Servo 3 neu 00Hier können Sie die Laufrichtung und Neutralstellung der Taumelscheibenservos einstellen. Bitte achten Siedabei auf eine korrekte Einstellung. Die Servos sollten so getrimmt werden, dass jeder Servoarm parallel zumHeckrohr verläuft (siehe Abbildung unten).Note: servo arm is parallel tocontrol arm 1the tail boomcontrol arm 2 ( at the oppositeof control arm 1)Servo2HR-3Servo2Servo1Servo3Diagram of 120° inverting eCCPM<strong>connect</strong>ionTempo RC Modell GmbHH-4control arm 3Servo3Servo1Servo2Diagram of 90° eCCPM <strong>connect</strong>ion0607