6. Elektrische Kleinantriebe - FB E+I: Home
6. Elektrische Kleinantriebe - FB E+I: Home
6. Elektrische Kleinantriebe - FB E+I: Home
- Keine Tags gefunden...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
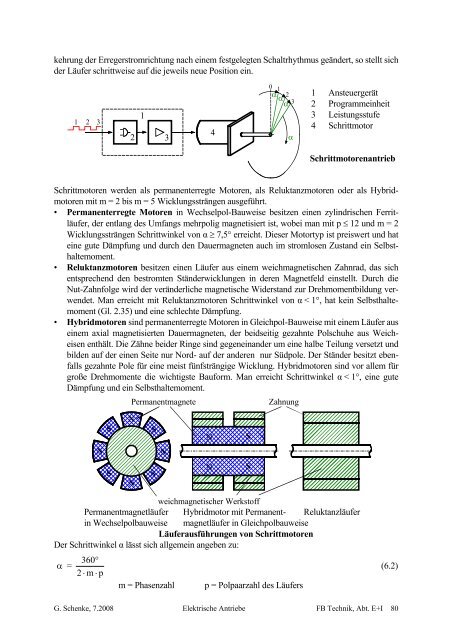
kehrung der Erregerstromrichtung nach einem festgelegten Schaltrhythmus geändert, so stellt sichder Läufer schrittweise auf die jeweils neue Position ein.1 2 312 340 1α 2 αα3α1 Ansteuergerät2 Programmeinheit3 Leistungsstufe4 SchrittmotorSchrittmotorenantriebSchrittmotoren werden als permanenterregte Motoren, als Reluktanzmotoren oder als Hybridmotorenmit m = 2 bis m = 5 Wicklungssträngen ausgeführt.• Permanenterregte Motoren in Wechselpol-Bauweise besitzen einen zylindrischen Ferritläufer,der entlang des Umfangs mehrpolig magnetisiert ist, wobei man mit p ≤ 12 und m = 2Wicklungssträngen Schrittwinkel von α ≥ 7,5° erreicht. Dieser Motortyp ist preiswert und hateine gute Dämpfung und durch den Dauermagneten auch im stromlosen Zustand ein Selbsthaltemoment.• Reluktanzmotoren besitzen einen Läufer aus einem weichmagnetischen Zahnrad, das sichentsprechend den bestromten Ständerwicklungen in deren Magnetfeld einstellt. Durch dieNut-Zahnfolge wird der veränderliche magnetische Widerstand zur Drehmomentbildung verwendet.Man erreicht mit Reluktanzmotoren Schrittwinkel von α < 1°, hat kein Selbsthaltemoment(Gl. 2.35) und eine schlechte Dämpfung.• Hybridmotoren sind permanenterregte Motoren in Gleichpol-Bauweise mit einem Läufer auseinem axial magnetisierten Dauermagneten, der beidseitig gezahnte Polschuhe aus Weicheisenenthält. Die Zähne beider Ringe sind gegeneinander um eine halbe Teilung versetzt undbilden auf der einen Seite nur Nord- auf der anderen nur Südpole. Der Ständer besitzt ebenfallsgezahnte Pole für eine meist fünfsträngige Wicklung. Hybridmotoren sind vor allem fürgroße Drehmomente die wichtigste Bauform. Man erreicht Schrittwinkel α < 1°, eine guteDämpfung und ein Selbsthaltemoment.PermanentmagneteZahnungSNSΝSNNSNSΝSweichmagnetischer WerkstoffPermanentmagnetläufer Hybridmotor mit Permanent- Reluktanzläuferin Wechselpolbauweise magnetläufer in GleichpolbauweiseLäuferausführungen von SchrittmotorenDer Schrittwinkel α lässt sich allgemein angeben zu:360°α =(<strong>6.</strong>2)2 ⋅ m ⋅ pm = Phasenzahl p = Polpaarzahl des LäufersG. Schenke, 7.2008 <strong>Elektrische</strong> Antriebe <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 80