3 Stetige Regler - JUMO
3 Stetige Regler - JUMO
3 Stetige Regler - JUMO

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3 <strong>Stetige</strong> <strong>Regler</strong><br />
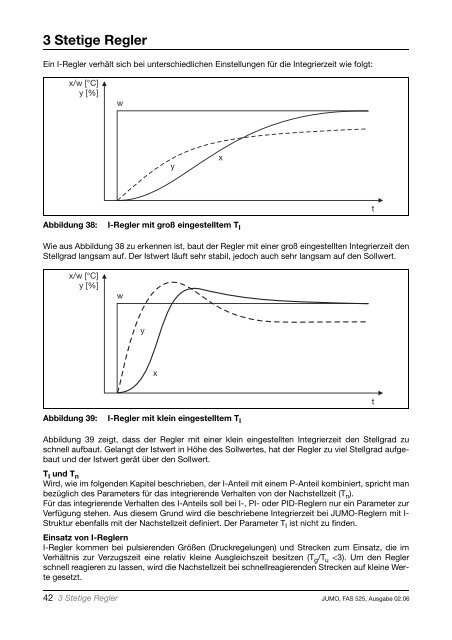
Ein I-<strong>Regler</strong> verhält sich bei unterschiedlichen Einstellungen für die Integrierzeit wie folgt:<br />
x/w [°C]<br />
y [%]<br />
Abbildung 38: I-<strong>Regler</strong> mit groß eingestelltem T I<br />
Wie aus Abbildung 38 zu erkennen ist, baut der <strong>Regler</strong> mit einer groß eingestellten Integrierzeit den<br />
Stellgrad langsam auf. Der Istwert läuft sehr stabil, jedoch auch sehr langsam auf den Sollwert.<br />
x/w [°C]<br />
y [%]<br />
w<br />
w<br />
y<br />
Abbildung 39: I-<strong>Regler</strong> mit klein eingestelltem T I<br />
x<br />
y<br />
x<br />
Abbildung 39 zeigt, dass der <strong>Regler</strong> mit einer klein eingestellten Integrierzeit den Stellgrad zu<br />
schnell aufbaut. Gelangt der Istwert in Höhe des Sollwertes, hat der <strong>Regler</strong> zu viel Stellgrad aufgebaut<br />
und der Istwert gerät über den Sollwert.<br />
TI und Tn Wird, wie im folgenden Kapitel beschrieben, der I-Anteil mit einem P-Anteil kombiniert, spricht man<br />
bezüglich des Parameters für das integrierende Verhalten von der Nachstellzeit (Tn ).<br />
Für das integrierende Verhalten des I-Anteils soll bei I-, PI- oder PID-<strong>Regler</strong>n nur ein Parameter zur<br />
Verfügung stehen. Aus diesem Grund wird die beschriebene Integrierzeit bei <strong>JUMO</strong>-<strong>Regler</strong>n mit I-<br />
Struktur ebenfalls mit der Nachstellzeit definiert. Der Parameter TI ist nicht zu finden.<br />
Einsatz von I-<strong>Regler</strong>n<br />
I-<strong>Regler</strong> kommen bei pulsierenden Größen (Druckregelungen) und Strecken zum Einsatz, die im<br />
Verhältnis zur Verzugszeit eine relativ kleine Ausgleichszeit besitzen (Tg /Tu