

Beispiele mechatronischer Systeme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
xvi<br />
9 <strong>Beispiele</strong> <strong>mechatronischer</strong> <strong>Systeme</strong><br />
Trotz ihrer Bedeutung als Fahrverhaltensmerkmal lässt sich die Längsbeschleunigung nicht<br />
ohne Weiteres als Regelgröße verwenden, da für sie keine Sollwerte vorliegen. Die Ableitung<br />
der Längsbeschleunigung nach der Zeit, also der Ruck, würde sich als mittelwertfreie Alternative<br />
mit einer Sollgröße von null anbieten. Mit dem Ruck können die komfortbeeinträchtigenden<br />
Ruckelschwingungen direkt beschrieben werden. Bei der Umsetzung am Serienfahrzeug<br />
bringt diese Regelgröße allerdings Schwierigkeiten mit sich. Zum einen ist die gemessene<br />
Längsbeschleunigung entweder zu stark gefiltert oder mit (Mess-)Rauschen behaftet, so<br />
dass sie sich nicht als Regelgröße eignet. Zum anderen bedeutet eine Regelung auf Beschleunigungsgrößen<br />
eine Dämpfung der Auswirkungen von Ruckelschwingungen, nicht die Beseitigung<br />
von deren Ursache, der Schwingung des Antriebsstrangs in seiner ersten Eigenform.<br />
Die Differenzdrehzahl zwischen Motor und Rad, auch als Torsionswinkelgeschwindigkeit bezeichnet,<br />
bietet sich als Alternative an. Sie enthält sowohl antriebs-, als auch die abtriebsseitige<br />
Schwingungen und ist im eingeschwungenen Zustand gleich Null, da durch die physikalische<br />
Kopplung dann keine Relativgeschwindigkeit mehr auftritt. Eine geeignete Antriebsstrangmodellierung<br />
sollte diese Größe als Zustand für eine spätere Regelung liefern.<br />
9.2.3 Antriebsstrangmodellierung und Identifikation<br />
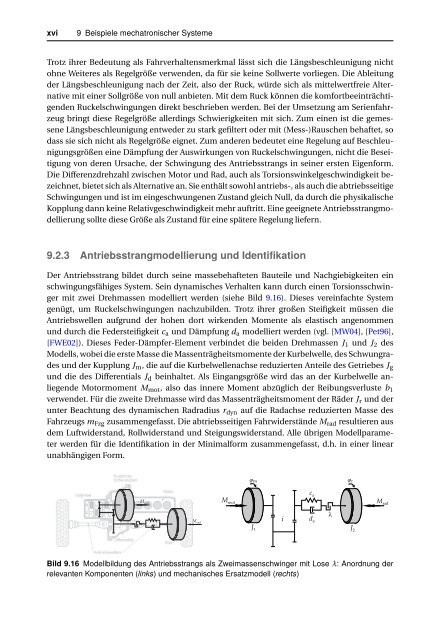
Der Antriebsstrang bildet durch seine massebehafteten Bauteile und Nachgiebigkeiten ein<br />
schwingungsfähiges System. Sein dynamisches Verhalten kann durch einen Torsionsschwinger<br />
mit zwei Drehmassen modelliert werden (siehe Bild 9.16). Dieses vereinfachte System<br />
genügt, um Ruckelschwingungen nachzubilden. Trotz ihrer großen Steifigkeit müssen die<br />
Antriebswellen aufgrund der hohen dort wirkenden Momente als elastisch angenommen<br />
und durch die Federsteifigkeit c a und Dämpfung d a modelliert werden (vgl. [MW04], [Pet96],<br />
[FWE02]). Dieses Feder-Dämpfer-Element verbindet die beiden Drehmassen J 1 und J 2 des<br />
Modells, wobei die erste Masse die Massenträgheitsmomente der Kurbelwelle, des Schwungrades<br />
und der Kupplung J m , die auf die Kurbelwellenachse reduzierten Anteile des Getriebes J g<br />
und die des Differentials J d beinhaltet. Als Eingangsgröße wird das an der Kurbelwelle anliegende<br />
Motormoment M mot , also das innere Moment abzüglich der Reibungsverluste b 1<br />
verwendet. Für die zweite Drehmasse wird das Massenträgheitsmoment der Räder J r und der<br />
unter Beachtung des dynamischen Radradius r dyn auf die Radachse reduzierten Masse des<br />
Fahrzeugs m Fzg zusammengefasst. Die abtriebsseitigen Fahrwiderstände M rad resultieren aus<br />
dem Luftwiderstand, Rollwiderstand und Steigungswiderstand. Alle übrigen Modellparameter<br />
werden für die Identifikation in der Minimalform zusammengefasst, d.h. in einer linear<br />
unabhängigen Form.<br />
Kupplung,<br />
Schwungrad<br />
Getriebe<br />
Motor<br />
M mot<br />
M rad<br />
Differential<br />
Rad<br />
Antriebswellen<br />
Bild 9.16 Modellbildung des Antriebsstrangs als Zweimassenschwinger mit Lose λ: Anordnung der<br />
relevanten Komponenten (links) und mechanisches Ersatzmodell (rechts)

