

KR 30 JET - KUKA Robotics
KR 30 JET - KUKA Robotics
KR 30 JET - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>KR</strong> <strong>30</strong> <strong>JET</strong><br />
Transporting the<br />
beam<br />
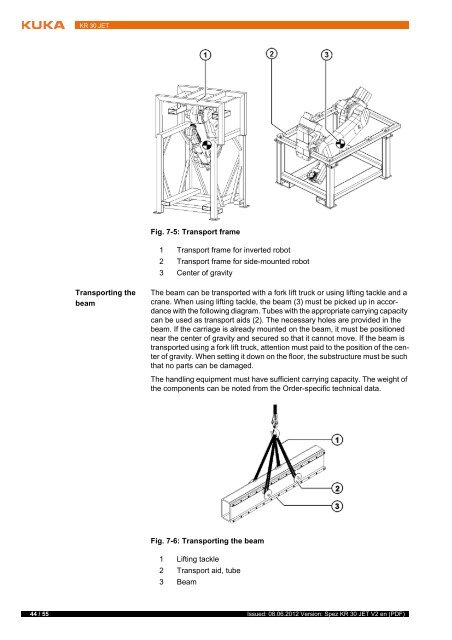
Fig. 7-5: Transport frame<br />
1 Transport frame for inverted robot<br />
2 Transport frame for side-mounted robot<br />
3 Center of gravity<br />
The beam can be transported with a fork lift truck or using lifting tackle and a<br />
crane. When using lifting tackle, the beam (3) must be picked up in accordance<br />
with the following diagram. Tubes with the appropriate carrying capacity<br />
can be used as transport aids (2). The necessary holes are provided in the<br />
beam. If the carriage is already mounted on the beam, it must be positioned<br />
near the center of gravity and secured so that it cannot move. If the beam is<br />
transported using a fork lift truck, attention must paid to the position of the center<br />
of gravity. When setting it down on the floor, the substructure must be such<br />
that no parts can be damaged.<br />
The handling equipment must have sufficient carrying capacity. The weight of<br />
the components can be noted from the Order-specific technical data.<br />
Fig. 7-6: Transporting the beam<br />
1 Lifting tackle<br />
2 Transport aid, tube<br />
3 Beam<br />
44 / 55 Issued: 08.06.2012 Version: Spez <strong>KR</strong> <strong>30</strong> <strong>JET</strong> V2 en (PDF)














