- Page 1: Author S.N.A.K.E.: A Dynamically Re
- Page 7: Acknowledgments To Joe Paradiso for
- Page 10 and 11: 3.4.3 Communications unit . . . . .
- Page 12 and 13: 4-7 Programming packet . . . . . .
- Page 15: List of Tables 3.1 Material thickne
- Page 18 and 19: (hotness or coolness), mechanorecep
- Page 20 and 21: Chapter 4 talks about the different
- Page 23 and 24: Chapter 2 Artificial Sensate Skins
- Page 25 and 26: Figure 2-1: Created by MIT Media La
- Page 27 and 28: Figure 2-3: Pushpin Computing Platf
- Page 29 and 30: (a) Sensitive Skin by Lumelsky (b)
- Page 31 and 32: (a) Sensor Matrix by Someya (b) Cap
- Page 33 and 34: it will determine its final mechani
- Page 35 and 36: Chapter 3 Hardware “Inanimate obj
- Page 37 and 38: different sensing modalities will a
- Page 39 and 40: It is clear that a serial protocol
- Page 41 and 42: Figure 3-4: I 2 C Active pull-up de
- Page 43 and 44: (a) Flex Node Front (b) Flex Node B
- Page 45 and 46: Figure 3-6: Node substrate material
- Page 47 and 48: Figure 3-7: Flex circuit cost as a
- Page 49 and 50: Mechanical Design Once cost issues
- Page 51 and 52: Figure 3-10: Node with electrical c
- Page 53 and 54: (a) Rigidized center (b) Aligned co
- Page 55 and 56:
shape in which the nodes are connec
- Page 57 and 58:
(a) MSP430F1610 QFN Package (b) FFC
- Page 59 and 60:
its better balance between Gain-Ban
- Page 61 and 62:
the substrate at the time of fabric
- Page 63 and 64:
therefore defines its stability. Ov
- Page 65 and 66:
Figure 3-15: Wheatstone bridge used
- Page 67 and 68:
which are localized. QTC sensors ar
- Page 69 and 70:
(a) Mini-sense cantilever with whis
- Page 71 and 72:
Figure 3-19: Toshiba TPS851/52 Ambi
- Page 73 and 74:
tasks, one of the inherent design t
- Page 75 and 76:
the nodes faster than what the bus
- Page 77:
a USB hub is needed. Although in th
- Page 80 and 81:
A key point in the design of the Ov
- Page 82 and 83:
How much memory is there available
- Page 84 and 85:
Figure 4-2: Bootloader Flow Chart 8
- Page 86 and 87:
flag 0x80 indicates a successful wr
- Page 88 and 89:
Sensor Type Sampling Rate Bit Depth
- Page 90 and 91:
the environment, the less active th
- Page 92 and 93:
4.2 PC Graphical User Interface The
- Page 94 and 95:
the USB device into a regular seria
- Page 96 and 97:
Figure 4-6: GUI Programming Environ
- Page 98 and 99:
control was added to change the num
- Page 100 and 101:
Once the process is stopped, the fi
- Page 102 and 103:
arbitrarily assigned. In the specif
- Page 104 and 105:
4.3.3 USB The last part of the comm
- Page 106 and 107:
of the design greatly affected seve
- Page 108 and 109:
Figure 5-2: Skin Patch bending prof
- Page 110 and 111:
sampling, along with some images of
- Page 112 and 113:
with the strain gages to match thei
- Page 114 and 115:
R3 RC 162Ω 809838Ω 165Ω 82483
- Page 116 and 117:
Node #004 − 3 SG1 (matched to 169
- Page 118 and 119:
(a) Data from strain gage 1 (b) Dat
- Page 120 and 121:
Figure 5-6: Pressure sensor calibra
- Page 122 and 123:
(a) Data from working pressure sens
- Page 124 and 125:
(a) No ambient light present; singl
- Page 126 and 127:
(a) Ambient Light sensor data from
- Page 128 and 129:
first of all this is highly undesir
- Page 130 and 131:
Proximity/Motion Sensing The last s
- Page 132 and 133:
To demonstrate the functionality of
- Page 134 and 135:
Because the amount of capacitance i
- Page 136 and 137:
or 12475 bytes every second. The US
- Page 138 and 139:
So in average, the strain gages con
- Page 140 and 141:
140
- Page 142 and 143:
Generally speaking, several goals o
- Page 144 and 145:
Code Distribution: a very simple me
- Page 146 and 147:
whenever the Skin Patch topology is
- Page 148 and 149:
MIPS Million Instructions Per Secon
- Page 150 and 151:
Node components Type Name Part Numb
- Page 152 and 153:
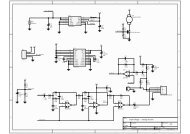
4 3 2 1 A A Node Sensing Suite Soun
- Page 154 and 155:
Amp1 P0Amp101 P0Amp102 P0Amp103 P0A
- Page 156 and 157:
Amp1 P0Amp101 P0Amp102 P0Amp103 P0A
- Page 158 and 159:
P0Amp405 P0Rsda01 P0Rscl01 P0U503 P
- Page 160 and 161:
Figure C-9: Node Top Overlay 160
- Page 162 and 163:
4 3 2 1 A A Brain Processing and Ac
- Page 164 and 165:
Figure C-13: Brain Dimensions (mils
- Page 166 and 167:
P0Cxu102 P0Cxu202 P0Cavcc01 P0Ravcc
- Page 168 and 169:
C:\Documents and Settings\Gerardo\M
- Page 170 and 171:
C:\Documents and Settings\Gerardo\M
- Page 172 and 173:
C:\Documents and Settings\Gerardo\M
- Page 174 and 175:
C:\Documents and Settings\Gerardo\M
- Page 176 and 177:
C:\Documents and Settings\Gerardo\M
- Page 178 and 179:
C:\Documents and Settings\Gerardo\M
- Page 180 and 181:
C:\Documents and Settings\Gerardo\M
- Page 182 and 183:
C:\Documents and Settings\Gerardo\M
- Page 184 and 185:
2 c:\Documents and Settings\Gerardo
- Page 186 and 187:
1 c:\Documents and Settings\Gerardo
- Page 188 and 189:
2 c:\Documents and Settings\Gerardo
- Page 190 and 191:
2 c:\Documents and Settings\Gerardo
- Page 192 and 193:
c:\Documents and Settings\Gerardo\M
- Page 194 and 195:
9 c:\Documents and Settings\Gerardo
- Page 196 and 197:
2 c:\Documents and Settings\Gerardo
- Page 198 and 199:
6 c:\Documents and Settings\Gerardo
- Page 200 and 201:
10 c:\Documents and Settings\Gerard
- Page 202 and 203:
14 c:\Documents and Settings\Gerard
- Page 204 and 205:
18 c:\Documents and Settings\Gerard
- Page 206 and 207:
206
- Page 208 and 209:
[13] Ken Gilleo. Handbook of Flexib
- Page 210 and 211:
[50] Joseph A. Paradiso, Joshua Lif