

Activity 3.1.6 Open and Closed Loop Systems – Fischertechnik
Activity 3.1.6 Open and Closed Loop Systems – Fischertechnik
Activity 3.1.6 Open and Closed Loop Systems – Fischertechnik

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Activity</strong> <strong>3.1.6</strong> <strong>Open</strong> <strong>and</strong> <strong>Closed</strong> <strong>Loop</strong><br />
<strong>Systems</strong> <strong>–</strong> <strong>Fischertechnik</strong><br />
Introduction<br />
Many devices function without ever knowing whether they are doing the job that they<br />
were programmed to do. They might run for a specific amount of time or perform one<br />
more function <strong>and</strong> then stop. For example if you set the clothes dryer to run for 45<br />
minutes, your clothes might be dry or they might not be dry. A clothes dryer is an<br />
open loop system because the process provides no feedback to the device. Newer<br />
clothes dryers possess moisture sensors. The moisture sensors inform the machine<br />
when the clothes are dry, at which point the dryer can stop running. The feedback<br />
provided by the sensor makes this a closed loop system.<br />
Equipment<br />
Procedure<br />
RoboPro software<br />
fischertechnik ® components:<br />
Interface, power supply,<br />
<strong>and</strong> USB cable<br />
2 mini switches<br />
5 wires 9 building blocks 30 mm<br />
Motor 8 building blocks 15 mm (1 pin)<br />
2 lamps 3 rack <strong>and</strong> pinion 60 mm<br />
Photocell Motor rack gearbox<br />
Phototransistor<br />
In this activity you will design an open loop program to control a motor driven on a<br />
track. Then you will design a closed loop system utilizing feedback from both analog<br />
<strong>and</strong> digital inputs to control the motor.<br />
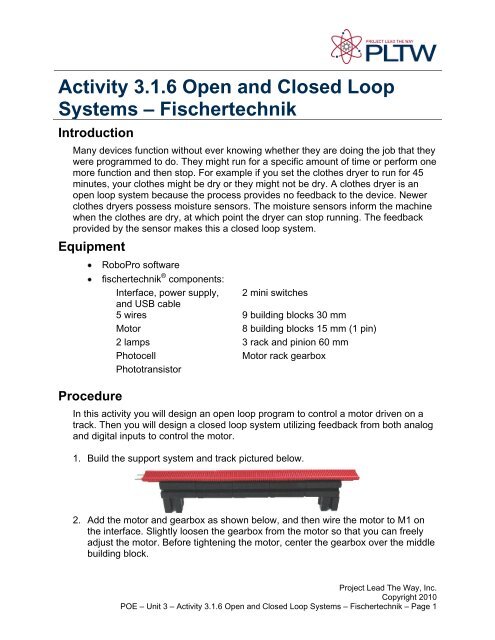
1. Build the support system <strong>and</strong> track pictured below.<br />
2. Add the motor <strong>and</strong> gearbox as shown below, <strong>and</strong> then wire the motor to M1 on<br />
the interface. Slightly loosen the gearbox from the motor so that you can freely<br />
adjust the motor. Before tightening the motor, center the gearbox over the middle<br />
building block.<br />
Project Lead The Way, Inc.<br />
Copyright 2010<br />
POE <strong>–</strong> Unit 3 <strong>–</strong> <strong>Activity</strong> <strong>3.1.6</strong> <strong>Open</strong> <strong>and</strong> <strong>Closed</strong> <strong>Loop</strong> <strong>Systems</strong> <strong>–</strong> <strong>Fischertechnik</strong> <strong>–</strong> Page 1
3. Write a program that will shuttle the motor back <strong>and</strong> forth 1.5 seconds each way<br />
20 times. Write a description next to each function block to explain what happens<br />
at each block. Save the program.<br />
4. Run the program <strong>and</strong> observe the final resting place of the gearbox. You may or<br />
not have to look closely, but the gearbox probably did not stop in the center.<br />
5. Is this an open loop or closed loop system?<br />
6. Where do you think the gearbox would have come to rest had you set the<br />
program to cycle 120 times?<br />
7. What problems <strong>and</strong> inefficiencies might this process cause if it were used in an<br />
assembly mechanism designed to run 24 hours per day for several days?<br />
Instructor’s Signature ______________________ Date __________<br />
8. Place a mini switch on both ends of the device as pictured below. Wire the<br />
switches to I1 <strong>and</strong> I2. Write a program that will shuttle the motor back <strong>and</strong> forth<br />
five times based on feedback from when the switches are pressed. Write a<br />
description next to each function block to explain what happens at each block.<br />
Save the program.<br />
9. Is this an open loop or closed loop system?<br />
10. How precise would this device be if it were designed to cycle 500 times?<br />
Instructor’s Signature ______________________ Date __________<br />
Project Lead The Way, Inc.<br />
Copyright 2010<br />
POE <strong>–</strong> Unit 3 <strong>–</strong> <strong>Activity</strong> <strong>3.1.6</strong> <strong>Open</strong> <strong>and</strong> <strong>Closed</strong> <strong>Loop</strong> <strong>Systems</strong> <strong>–</strong> <strong>Fischertechnik</strong> <strong>–</strong> Page 2
11. Remove the mini switches. Make the modifications as seen below. Add the<br />
smaller building blocks to the ends of the gearbox <strong>and</strong> motor. Use the larger<br />
building blocks to create extensions from the track on each end. Add covered<br />
lamps to the extensions using smaller building blocks on one side of the track.<br />
Using the same attachment method, place a phototransistor across from one<br />
lamp <strong>and</strong> a photocell across from the other. Note that the phototransistor sensor<br />
is polarity sensitive therefore it will only function when positive <strong>and</strong> negative<br />
leads are correctly attached.<br />
12. Write a program that will shuttle the motor back <strong>and</strong> forth five times using the<br />
phototransistor <strong>and</strong> photocell for feedback. Write a description next to each<br />
function block to explain what happens at each block. Save the program.<br />
Demonstrate the successful program for your instructor.<br />
Instructor’s Signature ______________________ Date __________<br />
Conclusion<br />
1. Describe an open loop system that has not already been given as an example.<br />
Could the system benefit from feedback? Justify your answer.<br />
2. Describe a closed loop system that has not already been given as an example.<br />
Describe the feedback utilized, <strong>and</strong> describe why that type of feedback is utilized.<br />
Project Lead The Way, Inc.<br />
Copyright 2010<br />
POE <strong>–</strong> Unit 3 <strong>–</strong> <strong>Activity</strong> <strong>3.1.6</strong> <strong>Open</strong> <strong>and</strong> <strong>Closed</strong> <strong>Loop</strong> <strong>Systems</strong> <strong>–</strong> <strong>Fischertechnik</strong> <strong>–</strong> Page 3














