

PHD Thesis - Institute for Computer Graphics and Vision - Graz ...
PHD Thesis - Institute for Computer Graphics and Vision - Graz ...
PHD Thesis - Institute for Computer Graphics and Vision - Graz ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
8.3. Localization experiments 145<br />
8.3.2 Path reconstruction<br />
The main application <strong>for</strong> global localization is to compute an initial robot position to initialize<br />
a probabilistic SLAM framework, e.g. [78]. The robot position is then usually maintained by an<br />
extended Kalman filter. The Kalman filter will include the knowledge of previous robot positions<br />
<strong>and</strong> also previous speed <strong>and</strong> heading estimates. Propagating this values probabilistically will<br />
result in a smooth reconstruction of the traversed path.<br />
In absence of a SLAM framework the traversed path has to be reconstructed by global localization<br />
solely. Each position estimate is then computed independently. Figure 8.12 shows a<br />
part of the robots path through the ”Office” environment reconstructed by global localization.<br />
The path consists of 204 independent pose estimated. The pose estimates are marked with<br />
black dots, together <strong>for</strong>ming the traversed path. The red dots mark gross outliers. Table 8.4<br />
summarizes the corresponding numbers. From 204 total pose estimates 21 showed a large deviation<br />
from the original path (from laser localization), thus they are marked as gross outliers.<br />
Such gross outliers would be detected by the Kalman filtering. The average epipolar distance,<br />
computed as a measure of accuracy, is 1.45 pixel.<br />
Figure 8.13 shows the reconstruction of a robots path in the ”Hallway” environment. In fact,<br />
three different sections of a robots path are shown. In total 124 positions have been computed.<br />
The corresponding paths are drawn as black dots. For this scenario no laser ground truth is<br />
available, thus outlier detection did not apply.<br />
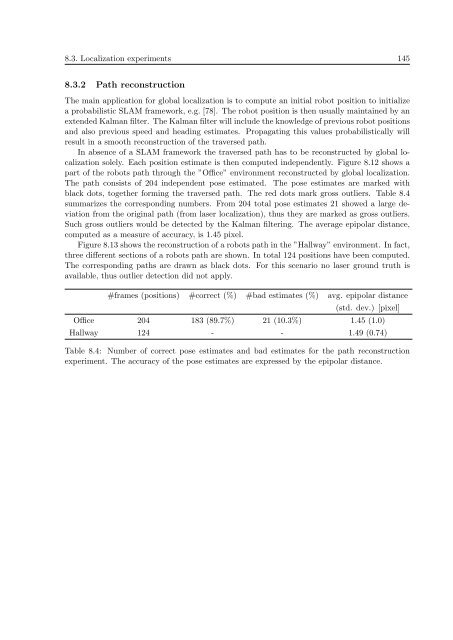
#frames (positions) #correct (%) #bad estimates (%) avg. epipolar distance<br />
(std. dev.) [pixel]<br />
Office 204 183 (89.7%) 21 (10.3%) 1.45 (1.0)<br />
Hallway 124 - - 1.49 (0.74)<br />
Table 8.4: Number of correct pose estimates <strong>and</strong> bad estimates <strong>for</strong> the path reconstruction<br />
experiment. The accuracy of the pose estimates are expressed by the epipolar distance.












