Smart Materials Solve Contradictions - Systematic Innovation
Smart Materials Solve Contradictions - Systematic Innovation
Smart Materials Solve Contradictions - Systematic Innovation

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
and condition resolution strategies appear to be<br />
possible, and so the place to start looking for the<br />
most relevant Inventive Principles is at the region<br />
at the centre of the figure where all three regions<br />
intersect. What this means is that the most likely<br />
Principles to solve the wrist replacement problem<br />
– based on the thousands of problem solvers that<br />
have travelled a similar road before us – are 2, 3,<br />
4, 5, 13, 22, 25 and 35.<br />
Although it might not look or feel like it, Principle<br />
35 is the one that is trying to point problem<br />
solvers in the direction of smart material<br />
solutions. As discussed in Reference 4, Principle<br />
35 is simultaneously the most frequently<br />
recommended Inventive Principle and the one<br />
that is the least well applied by problem solvers.<br />
When applied to the ‘taper and no taper’ problem,<br />
it is easy to see why – simply telling a designer to<br />
‘change one of the design parameters’ is only<br />
slightly better than useless in the vast majority of<br />
cases. The missing piece in the jigsaw, or rather<br />
the biggest mis-interpretation of this Principle is<br />
that it is often viewed as a call to optimize ‘a<br />
parameter’, whereas in actual fact – since TRIZ is<br />
fundamentally not about optimization – it is a call<br />
for problem solvers to adjust parameters far<br />
enough that a non-linear shift in performance<br />
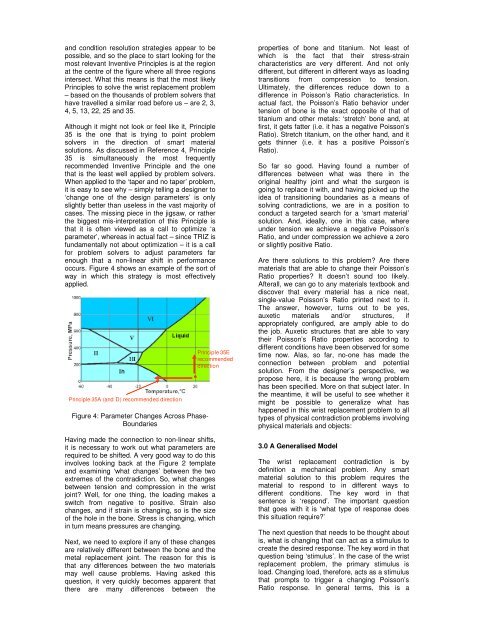
occurs. Figure 4 shows an example of the sort of<br />
way in which this strategy is most effectively<br />
applied.<br />
Principle 35A (and D) recommended direction<br />
Figure 4: Parameter Changes Across Phase-<br />
Boundaries<br />
Principle 35E<br />
recommended<br />
direction<br />
Having made the connection to non-linear shifts,<br />
it is necessary to work out what parameters are<br />
required to be shifted. A very good way to do this<br />
involves looking back at the Figure 2 template<br />
and examining ‘what changes’ between the two<br />
extremes of the contradiction. So, what changes<br />
between tension and compression in the wrist<br />
joint? Well, for one thing, the loading makes a<br />
switch from negative to positive. Strain also<br />
changes, and if strain is changing, so is the size<br />
of the hole in the bone. Stress is changing, which<br />
in turn means pressures are changing.<br />
Next, we need to explore if any of these changes<br />
are relatively different between the bone and the<br />
metal replacement joint. The reason for this is<br />
that any differences between the two materials<br />
may well cause problems. Having asked this<br />
question, it very quickly becomes apparent that<br />
there are many differences between the<br />
properties of bone and titanium. Not least of<br />
which is the fact that their stress-strain<br />
characteristics are very different. And not only<br />
different, but different in different ways as loading<br />
transitions from compression to tension.<br />
Ultimately, the differences reduce down to a<br />
difference in Poisson’s Ratio characteristics. In<br />
actual fact, the Poisson’s Ratio behavior under<br />
tension of bone is the exact opposite of that of<br />
titanium and other metals: ‘stretch’ bone and, at<br />
first, it gets fatter (i.e. it has a negative Poisson’s<br />
Ratio). Stretch titanium, on the other hand, and it<br />
gets thinner (i.e. it has a positive Poisson’s<br />
Ratio).<br />
So far so good. Having found a number of<br />
differences between what was there in the<br />
original healthy joint and what the surgeon is<br />
going to replace it with, and having picked up the<br />
idea of transitioning boundaries as a means of<br />
solving contradictions, we are in a position to<br />
conduct a targeted search for a ‘smart material’<br />
solution. And, ideally, one in this case, where<br />
under tension we achieve a negative Poisson’s<br />
Ratio, and under compression we achieve a zero<br />
or slightly positive Ratio.<br />
Are there solutions to this problem? Are there<br />
materials that are able to change their Poisson’s<br />
Ratio properties? It doesn’t sound too likely.<br />
Afterall, we can go to any materials textbook and<br />
discover that every material has a nice neat,<br />
single-value Poisson’s Ratio printed next to it.<br />
The answer, however, turns out to be yes,<br />
auxetic materials and/or structures, if<br />
appropriately configured, are amply able to do<br />
the job. Auxetic structures that are able to vary<br />
their Poisson’s Ratio properties according to<br />
different conditions have been observed for some<br />
time now. Alas, so far, no-one has made the<br />
connection between problem and potential<br />
solution. From the designer’s perspective, we<br />
propose here, it is because the wrong problem<br />
has been specified. More on that subject later. In<br />
the meantime, it will be useful to see whether it<br />
might be possible to generalize what has<br />
happened in this wrist replacement problem to all<br />
types of physical contradiction problems involving<br />
physical materials and objects:<br />
3.0 A Generalised Model<br />
The wrist replacement contradiction is by<br />
definition a mechanical problem. Any smart<br />
material solution to this problem requires the<br />
material to respond to in different ways to<br />
different conditions. The key word in that<br />
sentence is ‘respond’. The important question<br />
that goes with it is ‘what type of response does<br />
this situation require?’<br />
The next question that needs to be thought about<br />
is, what is changing that can act as a stimulus to<br />
create the desired response. The key word in that<br />
question being ‘stimulus’. In the case of the wrist<br />
replacement problem, the primary stimulus is<br />
load. Changing load, therefore, acts as a stimulus<br />
that prompts to trigger a changing Poisson’s<br />
Ratio response. In general terms, this is a