Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS
Fundamentals of Kalman Filtering and Applications to GNSS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
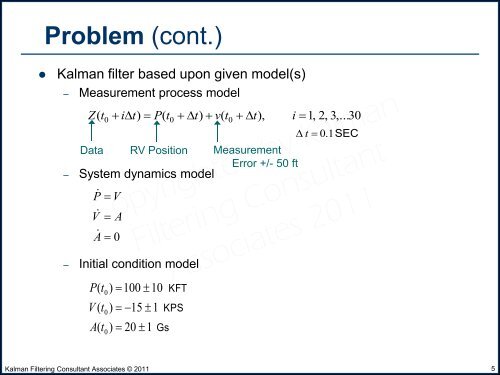
Problem (cont.)<br />
• <strong>Kalman</strong> filter based upon given model(s)<br />
– Measurement process model<br />
Z( t0 it)<br />
P(<br />
t0<br />
t)<br />
v(<br />
t0<br />
t),<br />
i 1,<br />
2, 3,...30<br />
t 0.1SEC<br />
Data RV Position Measurement<br />
Error +/- 50 ft<br />
– System dynamics model<br />
P<br />
V<br />
V<br />
A<br />
A<br />
0<br />
– Initial condition model<br />
P(<br />
t<br />
V ( t<br />
A(<br />
t<br />
0<br />
0<br />
0<br />
) 100<br />
10<br />
) 15<br />
1<br />
) 20 1<br />
Gs<br />
KFT<br />
KPS<br />
<strong>Kalman</strong> <strong>Filtering</strong> Consultant Associates © 2011<br />
5