Spring Pendulum Dynamic System - Mechatronics
Spring Pendulum Dynamic System - Mechatronics
Spring Pendulum Dynamic System - Mechatronics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
O<br />
de<br />
r<br />
dθ<br />
de<br />
θ<br />
dθ<br />
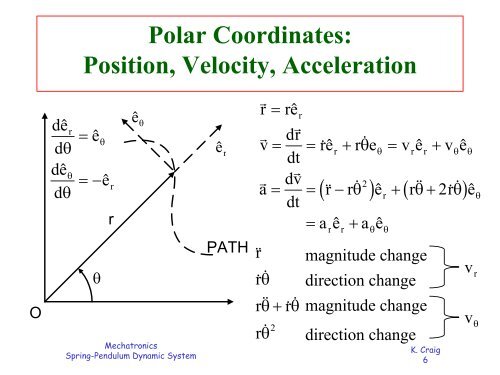
<strong>Mechatronics</strong><br />
<strong>Spring</strong>-<strong>Pendulum</strong> <strong>Dynamic</strong> <strong>System</strong><br />
Polar Coordinates:<br />
Position, Velocity, Acceleration<br />
= e<br />
=−e<br />
θ<br />
θ<br />
r<br />
r<br />
e θ<br />
e r<br />
PATH<br />
<br />
r<br />
<br />
v<br />
<br />
a<br />
r<br />
= re<br />
r<br />
<br />
dr<br />
= = re <br />
r<br />
+ rθ eθ = vrer<br />
+ vθeθ<br />
dt<br />
<br />
dv<br />
= = c r− rθ h b e r<br />
+ r + r e<br />
dt<br />
g<br />
2<br />
θ 2 θ <br />
= ae<br />
+ ae<br />
r<br />
θ <br />
r<br />
θ+<br />
r<br />
θ<br />
rθ<br />
2<br />
r<br />
r<br />
magnitude change<br />
direction change<br />
magnitude change<br />
direction change<br />
θ<br />
θ<br />
K. Craig<br />
6<br />
v r<br />
θ<br />
v θ