耳介を持つバイノーラル聴覚ロボットの音源方向推定の検討 - 奥乃研究室
耳介を持つバイノーラル聴覚ロボットの音源方向推定の検討 - 奥乃研究室
耳介を持つバイノーラル聴覚ロボットの音源方向推定の検討 - 奥乃研究室
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
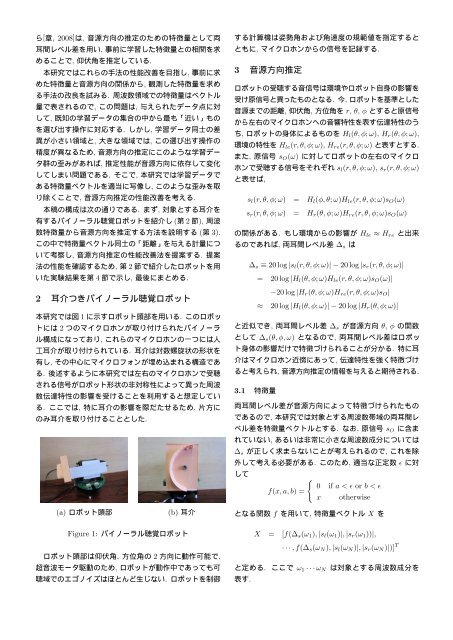
[, 2008], , , ., , . , , , . , , , , , . , , , .. , ( 2 ), ( 3)., . , 2 4 , .2 1 . 2 , . , . . , , ., .3 . , , , r, θ, φ , H l (θ, φ; ω), H r (θ, φ; ω), H le (r, θ, φ; ω), H re (r, θ, φ; ω) ., s O (ω) s l (r, θ, φ; ω), s r (r, θ, φ; ω),s l (r, θ, φ; ω) = H l (φ, θ; ω)H le (r, θ, φ; ω)s O (ω)s r (r, θ, φ; ω) = H r (θ, φ; ω)H re (r, θ, φ; ω)s O (ω). H le ≈ H re , ∆ s ∆ s ≡ 20 log |s l (r, θ, φ; ω)| − 20 log |s r (r, θ, φ; ω)|= 20 log |H l (θ, φ; ω)H le (r, θ, φ; ω)s O (ω)|−20 log |H r (θ, φ; ω)H re (r, θ, φ; ω)s O |≈ 20 log |H l (θ, φ; ω)| − 20 log |H r (θ, φ; ω)|, ∆ s θ, φ ∆ s (θ, φ, ω) , . , , .3.1 , . , s O , ∆ s , . , ɛ {0 if a < ɛ or b < ɛf(x, a, b) =x otherwise(a) (b) f , X Figure 1: , 2 ,, . X = [f(∆ s (ω 1 ), |s l (ω 1 )|, |s r (ω 1 ))|,· · · , f(∆ s (ω N ), |s l (ω N )|, |s r (ω N )|)] T. ω 1 · · · ω N .