Features - Seaeye
Features - Seaeye
Features - Seaeye
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
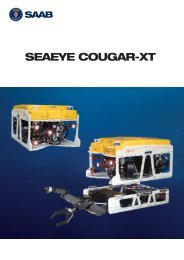
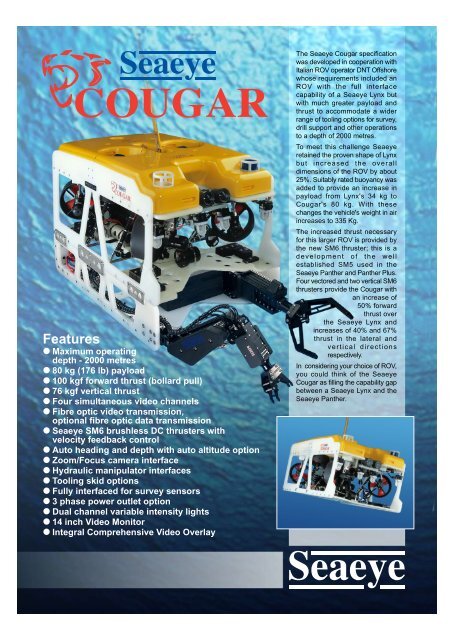
<strong>Features</strong>•Maximum operatingdepth - 2000 metres80 kg (176 lb) payload100 kgf forward thrust (bollard pull)76 kgf vertical thrust•Four simultaneous video channelsFibre optic video transmission,•optional fibre optic data transmission<strong>Seaeye</strong> SM6 brushless DC thrusters withvelocity feedback controlAuto heading and depth with auto altitude optionZoom/Focus camera interfaceHydraulic manipulator interfacesTooling skid optionsFully interfaced for survey sensors3 phase power outlet optionDual channel variable intensity lights•14 inch Video MonitorIntegral Comprehensive Video OverlayThe <strong>Seaeye</strong> Cougar specificationwas developed in cooperation withItalian ROV operator DNT Offshorewhose requirements included anROV with the full interfacecapability of a <strong>Seaeye</strong> Lynx butwith much greater payload andthrust to accommodate a widerrange of tooling options for survey,drill support and other operationsto a depth of 2000 metres.To meet this challenge <strong>Seaeye</strong>retained the proven shape of Lynxbut increased the overalldimensions of the ROV by about25%. Suitably rated buoyancy wasadded to provide an increase inpayload from Lynx's 34 kg toCougar's 80 kg. With thesechanges the vehicle's weight in airincreases to 335 Kg.The increased thrust necessaryfor this larger ROV is provided bythe new SM6 thruster; this is adevelopment of the wellestablished SM5 used in the<strong>Seaeye</strong> Panther and Panther Plus.Four vectored and two vertical SM6thrusters provide the Cougar withan increase of50% forwardthrust overthe <strong>Seaeye</strong> Lynx andincreases of 40% and 67%thrust in the lateral andvertical directionsrespectively.In considering your choice of ROV,you could think of the <strong>Seaeye</strong>Cougar as filling the capability gapbetween a <strong>Seaeye</strong> Lynx and the<strong>Seaeye</strong> Panther.
<strong>Seaeye</strong> Cougar is designed tooperate free swimming or inconjunction with a choice of <strong>Seaeye</strong>Tether Management Systems (TMS),which provide a 150 to 200 metreexcursion radius from a variableheight garage. The system hasvarious useful options such as a440vac 3-phase outlet and thecapacity to fit standard or customwork-skid packages fixed to theunderside of the vehicle.Manipulator Skid: 5 function manipulatorand 3 function extending grabber5 function manipulator with 3 functiongrabber replaced with WCO 38 LPcable cutterTooling SkidsStandard tooling skids have beendesigned to bolt directly under the CougarROV. This operation takes only a fewminutes. <strong>Seaeye</strong> are happy to designother skids to suit your particularrequirements. A <strong>Seaeye</strong> TMS with anadjustable garage entry height canaccommodate Cougar fitted withthese skids.SpecificationsMaximum working depth: 2000 metresLength:1506 mmHeight: 745 mmWidth:1000 mmThrust Fwd: 100 kgThrust Lateral: 72 kgThrust Vertical: 76 kgLaunch Weight: 335 kgPayload: 80 kgPropulsionAll <strong>Seaeye</strong> ROVs feature brushless DCthrusters, which, apart from having thegreatest power density, have integrateddrive electronics with velocity feedbackfor precise and rapid thrust control. Thesethrusters are interfaced to a fast PIDcontrol system along with a solid-staterate gyro for enhanced azimuth stability.These essential building blocks enable<strong>Seaeye</strong> Marine to provide superior controland response from their powerful ROVs,setting them apart from the competition.Six SM6 brushless DC thrusters powerthe <strong>Seaeye</strong> Cougar. The Thrusterconfiguration is four vectored horizontalunits and two vertical units providing fullthree-dimensional control.ChassisThe ROV chassis is manufactured inPolypropylene with a stainless steel liftframe. This rugged chassis is totallymaintenance free, non corroding and selfsupportingin seawater. The chassis canbe easily modified to allow for the fit ofcustom equipment with additionalequipment being readily bolted directlyto chassis members. Fixing points areprovided for the addition of under-slungtooling skids. <strong>Seaeye</strong> Marine was thefirst company to introduce polypropylenefor the construction of ROV frames.Pressure HousingsAll pressure housings are machined from6082 marine grade aluminium and hardanodised black. The electronics pod haswater and vacuum alarms fitted whichappear on the video overlay in the unlikelyevent of water ingress.Connectors<strong>Seaeye</strong> 316 SS metal shell connectorsare generally used throughout.BuoyancyThe syntactic foam buoyancy block issplit into two sections for easier handlingand access to vehicle components.Apertures are provided for sonar, Xenonstrobe and tracking transponders.Control SystemThe ROV system uses a half duplexRS485 communication link. All ROVcontrol data is transmitted between thesurface and subsea CPU PCB's over asingle screened twisted pair or over fibreoptics as an option.NavigationThe system uses a flux-gate compasswith a solid state rate sensor for enhancedazimuth stability.Accuracy: ± 1°Resolution: 0.351°Up-date rate: 98mSNote: Specifications may change without prior noticeDepth SensorThe depth sensor is in its own separate housingand has an accuracy ± 0.1% of fsd.Auto PilotThe compass and depth sensors provide anautomatic pilot for depth and heading. Analtimeter can be added as an option to provideauto altitude.Camera Tilt SystemA video camera tilt platform is fitted as standardto which two cameras and lights can be fitted.A proportional tilt feedback potentiometerprovides an accurate tilt angle which is displayedon the video overlay system.LightingTwo individually controlled lighting channels areprovided. Each channel has its own brilliancecontrol on the pilot's Hand Control Unit. A totalof 600 watts of lighting is available. Each lampunit is individually fused to facilitate easiermaintenance in the event of a lamp bulb failure.Video SystemThe standard configuration is to transmitmultiplexed video over two multimode fibres inthe umbilical/tether. This provides up to 4simultaneous video channels.For shallow rated systems it is possible to savesome cost and transmit video over two screentwisted pairs which will provide two simultaneousvideo channels. A camera switch function isprovided to allow more than two cameras to befitted.Surface Control UnitThe surface unit provides the switching anddistribution of the power supplies and is the maininterface for the ROV system. The surface unitprovides the following:• AC and DC supply switching and distribution• DC current and voltage indication• Control of video and video overlay• A keypad for setting up system configuration• Plugs and sockets for system connectionsand interfaces for ancillary equipment• ROV control system (remote from the handcontrol unit)• This unit is 19" rack mountable• Output (RS232) to Telemetry monitor unitPilots Hand Control UnitThe Hand Control Unit (HCU) provides theinterface between the operator and vehicle bya series of switches and controls. The HCUplugs into the surface control unit and provesthe pilot with the following controls:• Vehicle movement, direction and speed• Camera tilt control• All lighting controls• Safety thruster enable switch• Auto depth and heading• Additional camera selection• Propulsion system offsets and power settings• 5 meter 'flying' lead cableSurface Power Supply UnitThis unit provides the power supplies for theROV system. It has full safety features includingboth AC and DC Line Insulation Monitors (LIMs)that constantly monitor electrical leakage in thesystem. Both AC and DC LIMs have trip outsand alarm indicators. 380, 415, 440 and 475Vinput tappings are available for the three phase,50/60Hz input supply.The surface power supply unit provides powerto the ROV and TMS via two separate and fullyisolated channels.SEAEYE MARINE LTD.<strong>Seaeye</strong> House, Lower Quay Road, Fareham, Hampshire PO16 0RQ, United KingdomTel: +44 (0) 1329 289000 Fax: +44 (0) 1329 289001Email: rovs@seaeye.com www.seaeye.comCougar Rev 0