

connection mechanisms for modular self-reconfigurable robots
connection mechanisms for modular self-reconfigurable robots
connection mechanisms for modular self-reconfigurable robots

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
TECHNICAL UNIVERSITY OF CLUJ-NAPOCA<br />
CONNECTION MECHANISMS FOR MODULAR<br />
SELF-RECONFIGURABLE ROBOTS<br />
Dan MÂNDRU, Ion LUNGU, Olimpiu TĂTAR<br />
Abstract: The <strong>self</strong>-<strong>reconfigurable</strong> <strong>robots</strong> are <strong>modular</strong> systems able to configure various structures. Among other<br />
imposed requirements, there is the <strong>connection</strong> / dis<strong>connection</strong> ability of the modules. In this paper, the general aspects<br />
regarding the <strong>self</strong>-<strong>reconfigurable</strong> <strong>robots</strong> are presented and several docking <strong>mechanisms</strong> are comparatively analysed.<br />
The synthesis criteria of the <strong>connection</strong> <strong>mechanisms</strong> are emphasized and a proposed variant of a shape memory<br />
actuated mechanism is described. Key words: <strong>modular</strong> robot, <strong>self</strong>-<strong>reconfigurable</strong>, docking mechanism, shape memory.<br />
1. INTRODUCTION CONCERNING THE<br />
SELF-RECONFIGURABLE ROBOTS<br />
A <strong>self</strong>-<strong>reconfigurable</strong> <strong>modular</strong> robotic<br />
system is composed of identical modules. It can<br />
actively configure various structures using the<br />
same modules and thus can adapt to the<br />
external environment and to a specific task.<br />
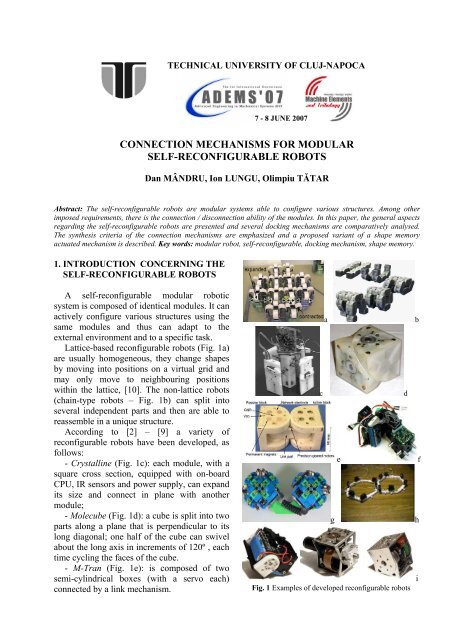
Lattice-based <strong>reconfigurable</strong> <strong>robots</strong> (Fig. 1a)<br />
are usually homogeneous, they change shapes<br />
by moving into positions on a virtual grid and<br />
may only move to neighbouring positions<br />
within the lattice, [10]. The non-lattice <strong>robots</strong><br />
(chain-type <strong>robots</strong> – Fig. 1b) can split into<br />
several independent parts and then are able to<br />
reassemble in a unique structure.<br />
According to [2] – [9] a variety of<br />
<strong>reconfigurable</strong> <strong>robots</strong> have been developed, as<br />
follows:<br />
- Crystalline (Fig. 1c): each module, with a<br />
square cross section, equipped with on-board<br />
CPU, IR sensors and power supply, can expand<br />
its size and connect in plane with another<br />
module;<br />
- Molecube (Fig. 1d): a cube is split into two<br />
parts along a plane that is perpendicular to its<br />
long diagonal; one half of the cube can swivel<br />
about the long axis in increments of 120º , each<br />
time cycling the faces of the cube.<br />
- M-Tran (Fig. 1e): is composed of two<br />
semi-cylindrical boxes (with a servo each)<br />
connected by a link mechanism.<br />
7 - 8 JUNE 2007<br />
a b<br />
c d<br />
e f<br />
g h<br />
Fig. 1 Examples of developed <strong>reconfigurable</strong> <strong>robots</strong><br />
i
- CONRO (Fig. 1f): each module has two<br />
DOF, is 108 mm long and weighs 115g; is<br />
equipped with two motors, batteries, a<br />
microcontroller and IR communication system;<br />
- Molecule (Fig. 1g): each molecule consists<br />
of a pair of two DOF atoms, connected by a<br />
link; twelve movements of each atom can<br />
per<strong>for</strong>m <strong>self</strong>-reconfiguration;<br />
- Metamorphic (Fig. 1h): the modules,<br />
having a planar hexagonal shape with 3 DOF,<br />
can connect, disconnect and rotate around its<br />
neighbours;<br />
- Polypod and PolyBot (Fig. 1i): are based<br />
on simple and versatile homogeneous systems;<br />
Polypod contains two types of modules: a two<br />
DOF segment with two <strong>connection</strong> <strong>mechanisms</strong><br />
and a passive cubic element with six <strong>connection</strong><br />
elements; PolyBot contains one DOF modules<br />
equipped with an on-board computer and<br />
sensing elements.<br />
2. ANALYSIS OF THE DOCKING<br />
MECHANISMS<br />
The reconfiguration ability implies that the<br />
modules contain <strong>connection</strong> <strong>mechanisms</strong><br />
equipped with actuators able to apply <strong>for</strong>ces on<br />
a latching mechanism so that the connector is<br />
able to per<strong>for</strong>m <strong>self</strong>-<strong>connection</strong> and<br />
dis<strong>connection</strong> operations.<br />
b c<br />
Fig. 2 Examples of <strong>connection</strong> <strong>mechanisms</strong><br />
a<br />
d<br />
One problem of the <strong>connection</strong> <strong>mechanisms</strong><br />
is the orientation that must bring the<br />
<strong>mechanisms</strong> at the right position and<br />
orientation to plug in. Usually a male / female<br />
system is designed to centred the component<br />
during the plugging phase.<br />
Figure 2 presents several docking<br />
<strong>mechanisms</strong> of the above-presented <strong>self</strong><strong>reconfigurable</strong><br />
<strong>robots</strong>. The <strong>connection</strong><br />
mechanism of M-Tran utilizes rare-earth<br />
magnets <strong>for</strong> attaching and shape memory alloy<br />
coil springs <strong>for</strong> detaching (Fig. 2a).<br />
Each unit of Fractum (Fig. 2b) has six arms:<br />
three electromagnet male arms and three<br />
permanent magnet female arms. If a neighbour<br />
male has the same polarity of permanent<br />
magnet, the <strong>connection</strong> occurs.<br />
In [1] an active connector <strong>for</strong> electrical and<br />
mechanical <strong>connection</strong> of components of a <strong>self</strong><strong>reconfigurable</strong><br />
robot is presented. It can<br />
transmit axial, shear <strong>for</strong>ces and torque due to a<br />
shape memory alloy actuator used to move the<br />
flexible lamellae endpoint and control thus a<br />
<strong>connection</strong> / dis<strong>connection</strong> mechanism (Fig. 2c)<br />
Polybot: is composed of one degree of<br />
freedom modules connected end to end through<br />
four pins, four holes and four electrical<br />
connectors actuated with shape memory alloy<br />
actuators. PolyBot has hermaphroditic<br />
<strong>connection</strong> plates.<br />
CONRO: in its structure there are active and<br />
passive symmetric connectors based on SMA<br />
actuators and permanent magnets. The only<br />
way to disconnect two modules is from the<br />
active side of the <strong>connection</strong>. Crystalline:<br />
contains a passive and an active connector<br />
based on a channel and rotating key concept.<br />
Most of the above presented <strong>mechanisms</strong> are<br />
too complicated and provide only electrical or<br />
mechanical <strong>connection</strong>. Many docking<br />
mechanism include shape memory alloy<br />
elements as actuators of latching components.<br />
3. SYNTHESIS CRITERIA FOR THE<br />
DOCKING MECHANISMS<br />
Any docking procedure implies following<br />
steps: coordinate and align two modules based<br />
on the docking guidance system, overcome the<br />
inevitable errors in the alignment by<br />
coordinated movements of both docking ends
and finally ensure the secure <strong>connection</strong>. After<br />
docking, the modules must sense the new<br />
<strong>connection</strong>s and thus two connected modules<br />
will move as a single module.<br />
Based on functional and constructive<br />
constrains imposed to the <strong>connection</strong><br />
<strong>mechanisms</strong> of <strong>self</strong>-<strong>reconfigurable</strong> <strong>robots</strong>,<br />
several synthesis criteria, useful in developing<br />
future <strong>mechanisms</strong>, are identified as follows:<br />
- assuring both mechanical and electrical<br />
<strong>connection</strong> in order to transmit different types<br />
of <strong>for</strong>ces and electrical signals with a simple<br />
design, small number of components;<br />
- <strong>connection</strong> / dis<strong>connection</strong> must be simple,<br />
fast and secure;<br />
- autonomous docking procedure;<br />
- capacity to connect with an identical<br />
connector;<br />
- symmetrical structure to avoid orientation;<br />
- ability <strong>for</strong> <strong>self</strong>-alignment;<br />
- convenient and protected sensor placement;<br />
- simplicity and stability of the latching<br />
mechanism;<br />
- low power consumption and no power to<br />
maintain latching;<br />
- impact and load strength, stiffness, protection<br />
from the environment;<br />
- easy access to the small number of moving<br />
parts;<br />
- possibility to be built using CNC machines or<br />
rapid prototyping.<br />
4. THE PROPOSED CONNECTION<br />
MECHANISM<br />
In this paper, a <strong>connection</strong> mechanism is<br />
proposed. It is based on a semiautomatic<br />
locking mechanism that works like an<br />
automatic mechanism in one direction (locking<br />
is automatically per<strong>for</strong>med) and like a<br />
commanded mechanism in opposite direction<br />
(unlocking is realized through an exterior<br />
command). Constructively, the locking<br />
mechanism contains profiled elements. The<br />
latching mechanism is released by using a<br />
shape memory alloy actuator.<br />
4.1. Shape Memory Actuator<br />
Shape memory alloys represent a new class<br />
of material, capable of trans<strong>for</strong>ming thermal<br />
energy into mechanical work. Shape memory<br />
effect is a property of certain materials to<br />
recover some previously shape or size when<br />
subjected to a heating procedure.<br />
Fig. 3 The shape memory effect<br />
In figure 3 the shape memory process is<br />
shown microscopically: austenite is cooled to<br />
<strong>for</strong>m twinned martensite without undergoing a<br />
shape change, and then is de<strong>for</strong>med by moving<br />
twin boundaries. Heating will return the<br />
originally austenitic structure and shape. The<br />
austenite phase is represented by square lattice,<br />
while the martensite is characterized by<br />
rhombic lattice.<br />
Electrical shape memory alloy actuators are<br />
actuated via direct current (change in<br />
temperature is internally generated by<br />
resistance heating). Designing these shape<br />
memory alloy actuators is an interdisciplinary<br />
approach covering the design of the actuators<br />
components shown in figure 4.<br />
Fig. 4 The structure of shape memory alloy actuators<br />
The power system provides energy to heat<br />
the active elements and to operate the control<br />
and drive circuitry. The control systems<br />
provides “on” and “off” control to operate the<br />
active elements. The driver system limits the<br />
power to the active elements and protects them<br />
from damage due to overheating. The active<br />
elements provide the action. Selection of a<br />
suitable alloy is a function of trans<strong>for</strong>mation<br />
temperature, size of memory effect, size of<br />
memory effect, hysteresis, and number of
cycles. Ni-Ti alloy (NITINOL) is most suitable<br />
<strong>for</strong> applications requiring controllability, high<br />
wok per unit volume, high number of cycles, an<br />
low current <strong>for</strong> activation. The mechanical<br />
associated structure supports the active<br />
elements, permitting to act in the desired<br />
manner and protects them from overstretching,<br />
sharp bends and other <strong>for</strong>ces, which could<br />
damage or degrade their per<strong>for</strong>mance.<br />
The advantages of these actuators are: small<br />
size, light weight, high power to weight ratio,<br />
smooth and silent operation, long life, and<br />
precise controllability. The slow response on<br />
cooling, the restricted energy efficiency and<br />
some non-linear properties are the drawbacks.<br />
For releasing of the latching element, an<br />
actuator based on shape memory wire was<br />
chosen. When heated over the temperature of<br />
phase trans<strong>for</strong>mation, the wire will contract<br />
with an amount of 3-5% of the length.<br />
4.2 The 3D model of the mechanism<br />
In figure 5 the geometrical model of the<br />
proposed <strong>connection</strong> mechanism is presented.<br />
a<br />
b<br />
Fig. 5 The 3D model of the <strong>connection</strong> mechanism<br />
c<br />
d<br />
e
The male component placed on one face of a<br />
cubic module (Fig. 5a) consists of two special<br />
shaped docking pins. The female connector,<br />
placed on one face of the second cubic module<br />
(Fig. 5b) consists of two holes <strong>for</strong> accepting<br />
other module’s docking pins.<br />
The female connector has a locking /<br />
releasing mechanism behind the holes. It has<br />
two functioning states. In the non-active state, it<br />
can accept and lock the incoming pins through<br />
an intermediary oscillatory element actuated by<br />
the elastic <strong>for</strong>ce given by elastic lamellae (leaf<br />
spring). In the activated state, it can release the<br />
lock due to the action of an actuator based on a<br />
shape memory wire. One end of the fire is fixed<br />
and another one is connected with the mobile<br />
locking element. When a current pass the wire,<br />
it is heating and then contracts and pulls the<br />
oscillatory element. Its turning conducts to<br />
disengaging of the modules. Figures 5 c,d and e<br />
give some details concerning the coupled<br />
modules and the structure of the locking<br />
mechanism. The connector / releasing<br />
mechanism is power efficient and it consumes<br />
no electric energy when in the default state.<br />
Fig. 6 The electrical scheme <strong>for</strong> the actuator control<br />
A wire made of Ni-Ti alloy called<br />
FLEXINOL was considered in our design. Its<br />
diameter is 150 µm. The recommended current<br />
to heat the wire (up to the trans<strong>for</strong>mation<br />
temperature 70ºC) in half of a second is 180<br />
mA, the linear resistance of the wire is 50 Ω/m.<br />
The recovery <strong>for</strong>ce developed on heating due to<br />
the shape memory effect is 3,23N and<br />
de<strong>for</strong>mation (or relaxation) <strong>for</strong>ce is 0,61N. This<br />
<strong>for</strong>ce is give by the leaf spring. The<br />
recommended shape memory effect of 4% was<br />
taken into account in determine the necessary<br />
length of the wire (50 mm, meaning 2 mm<br />
contraction on heating – enough to disengage<br />
the mechanism). The number of operation<br />
cycles depends on the cooling time of the active<br />
wire, less then 0,5 sec in normal environment<br />
conditions. When a docking procedure is<br />
per<strong>for</strong>med, one module must signal its position<br />
to other module and this must sense this signal.<br />
Fig 6 gives a scheme already use by the<br />
authors <strong>for</strong> controlling shape memory wire<br />
actuators which contains a PWM circuit to<br />
resistively heat the wire.<br />
5. FURTHER RESEARCH<br />
Our future ef<strong>for</strong>ts will be focussed on the<br />
design of several <strong>connection</strong> <strong>mechanisms</strong><br />
placed on different faces of the cube, which<br />
allow connecting a module with several similar<br />
modules and making chains, trees and other<br />
structures.<br />
6. CONCLUSION<br />
By changing their configuration, the <strong>self</strong><strong>reconfigurable</strong><br />
<strong>robots</strong> have various potential<br />
applications in extreme environments<br />
inaccessible to humans: in space or deep sea, in<br />
nuclear plants, <strong>for</strong> urban search and rescue in<br />
damaged buildings, military maintenance and<br />
so on. They respond to client-oriented<br />
production and task-oriented robotic system<br />
requirements.<br />
The docking <strong>mechanisms</strong> must be simple do<br />
not add extra complexity to an already complex<br />
system. They must respond to several<br />
geometric and latching requirements, physical<br />
robustness, energy transfer, maintenance and<br />
manufacturing conditions.
A docking mechanism has been described. It<br />
presents a <strong>self</strong>-latching mechanism and shape<br />
memory alloy actuator to disengage. The<br />
proposed variant is characterized by light<br />
weight, small number of mobile parts, simple<br />
actuation system and simple technology.<br />
7. AKNOWLEDGEMENT<br />
This work is supported by CE-EX M1-493<br />
project no. 91/2006, Miniature robotic system<br />
with <strong>self</strong>-reconfiguring and <strong>self</strong>-replicating<br />
skills – ROMAR.<br />
8. REFERENCES<br />
[1] Badescu, M., Mavroidis, C., Novel Active<br />
Connector <strong>for</strong> Modular Robotic Systems,<br />
IEEE/ASME Transactions on Mechatronics,<br />
vol. 8, no. 3, 2003, pp. 342 – 351.<br />
[2] Castano, A., Chokkalingam, R., Will, P.,<br />
Autonomous and Self-Sufficient CONRO<br />
Modules <strong>for</strong> Reconfigurable Robots,<br />
Distributed Autonomous Robotics 4, 2000,<br />
Springer, Berlin, pp. 155–164.<br />
[3] Duhant, D., Robotic atom, Proceedings of<br />
the IMechE Conference, 2002, pp. 843-850.<br />
[4] Fei, Y., Zhao, X., Design and dock analysis<br />
<strong>for</strong> the interactive module of <strong>self</strong>-reconfigu<br />
rable robot, Robotics Autonomous Systems<br />
(2006), doi:10.1016/j. robot.2006.07.006.<br />
[5] Fukuda, T., Nakagawa, S., Dynamically<br />
Reconfigurable Robotic System, Proc. of the<br />
IEEE Int. Conf. on Robotics and<br />
Automation, pp. 1581–1586, 1998.<br />
[6] Kotay, K., Self-reconfiguring <strong>robots</strong>:<br />
designs, algorithms, and applications , Phd<br />
Thesis, Dartmouth College Hanover, New<br />
Hampshire, 2003.<br />
[7] Kurokawa, H., Yoshida, E., Tomita, K.,<br />
Self-<strong>reconfigurable</strong> M-TRAN structures and<br />
walker generation, Robotics and Autono<br />
mous Systems, 54 (2006), pp. 142 – 149.<br />
[8] Stoy, K., Shen, W.M., Will, P.M., A simple<br />
approach to the control of locomotion in <strong>self</strong><br />
-<strong>reconfigurable</strong> <strong>robots</strong>, Robotics and Auto<br />
nomous Systems, 44(2003), pp. 191–199.<br />
[9] Suthakorn, J., Cushing, A., Chirikjian, G.,<br />
An Autonomous Self-Replicating Robotic<br />
System Proc. of the 2003 IEEE/ASME Int.<br />
Conf. on Advanced Intelligent Mechatronics<br />
(AIM 2003) pp. 137-142.<br />
[10] Zong, G., Deng, Z., Wang, W., Realization<br />
of a Modular Reconfigurable Robot <strong>for</strong><br />
Rough Terrain, Proc. the Int. Conf. on Mech<br />
and Autom., pp. 289–294, Louyang, 2006.<br />
Mecanisme de cuplare-decuplare în structura roboţilor auto-reconfigurabili<br />
Rezumat: Roboţii auto-reconfigurabili sunt sisteme <strong>modular</strong>e ce îşi pot schimba <strong>for</strong>ma, sau se pot reconfigura, pentru a<br />
adapta propria structură la sarcina de lucru. Printre condiţiile impuse structurilor robotizate auto-reconfigurabile se<br />
numără şi capacitatea cuplare / decuplare a modulelor. În lucrare sunt sistematizate caracteristicile mecanismelor de<br />
conectare, apoi sunt analizate cele mai importante metode de conectare, sunt date criterii de sinteza a mecanismelor de<br />
cuplare / decuplare, după care este prezentată soluţia propusă de autori, având în structura un actuator pe baza de aliaje<br />
cu memoria <strong>for</strong>mei.<br />
Dan Mândru, Professor, Technical University of Cluj-Napoca, Department of Mechanisms, Fine<br />
Mechanics and Mechatronics, email: Dan.Mandru@mmfm.utcluj.ro, tel. +40264-401645<br />
Ion Lungu, PhD Student, Technical University of Cluj-Napoca, Department of Mechanisms, Fine<br />
Mechanics and Mechatronics, email: lungu_ion@yahoo.com, tel. +40264-401645<br />
Olimpiu Tătar, Lecturer, Technical University of Cluj-Napoca, Department of Mechanisms, Fine<br />
Mechanics and Mechatronics, email: olimpiut@yahoo.com, tel. +40264-401681
