VEXnet Field Control System User Guide - VEX Robotics
VEXnet Field Control System User Guide - VEX Robotics
VEXnet Field Control System User Guide - VEX Robotics
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
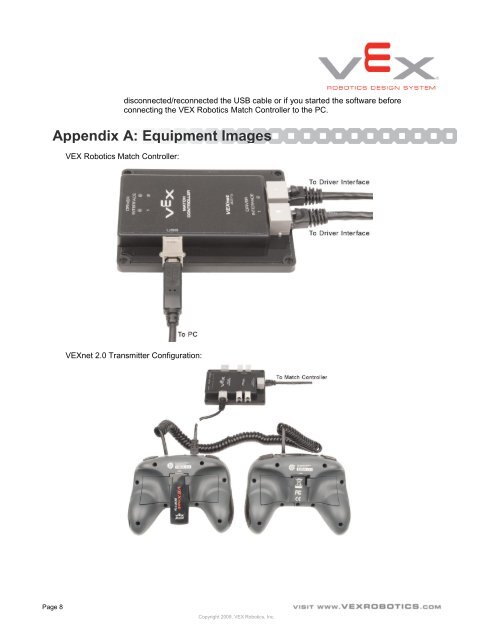
disconnected/reconnected the USB cable or if you started the software beforeconnecting the <strong>VEX</strong> <strong>Robotics</strong> Match <strong>Control</strong>ler to the PC.Appendix A: Equipment Images<strong>VEX</strong> <strong>Robotics</strong> Match <strong>Control</strong>ler:<strong><strong>VEX</strong>net</strong> 2.0 Transmitter Configuration:Page 8Copyright 2009. <strong>VEX</strong> <strong>Robotics</strong>, Inc.