Downloaded from rsif.royalsocietypublish<strong>in</strong>g.org on May 27, 2013<strong>Active</strong> <strong>and</strong> <strong>passive</strong> <strong>stabilization</strong> <strong>of</strong> <strong>body</strong><strong>pitch</strong> <strong>in</strong> <strong>in</strong>sect flightrsif.royalsocietypublish<strong>in</strong>g.orgResearchCite this article: Ristroph L, Ristroph G,Morozova S, Bergou AJ, Chang S,Guckenheimer J, Wang ZJ, <strong>Cohen</strong> I. 2013 <strong>Active</strong><strong>and</strong> <strong>passive</strong> <strong>stabilization</strong> <strong>of</strong> <strong>body</strong> <strong>pitch</strong> <strong>in</strong> <strong>in</strong>sectflight. J R Soc Interface 10: 20130237.http://dx.doi.org/10.1098/rsif.2013.0237Received: 13 March 2013Accepted: 29 April 2013Leif Ristroph 1 , Gunnar Ristroph 5 , Svetlana Morozova 1 , Attila J. Bergou 6 ,Song Chang 2 , John Guckenheimer 3 , Z. Jane Wang 1,4 <strong>and</strong> <strong>Itai</strong> <strong>Cohen</strong> 11 Department <strong>of</strong> Physics, 2 School <strong>of</strong> Applied <strong>and</strong> Eng<strong>in</strong>eer<strong>in</strong>g Physics, 3 Department <strong>of</strong> Mathematics, <strong>and</strong>4 School <strong>of</strong> Mechanical <strong>and</strong> Aerospace Eng<strong>in</strong>eer<strong>in</strong>g, Cornell University, Ithaca, NY 14853, USA5 IJK Controls, Dallas, TX 75231, USA6 Department <strong>of</strong> Eng<strong>in</strong>eer<strong>in</strong>g, Brown University, Providence, RI 02912, USAFly<strong>in</strong>g <strong>in</strong>sects have evolved sophisticated sensory–motor systems, <strong>and</strong> herewe argue that such systems are used to keep upright aga<strong>in</strong>st <strong>in</strong>tr<strong>in</strong>sic flight<strong>in</strong>stabilities. We describe a theory that predicts the <strong>in</strong>stability growth rate <strong>in</strong><strong>body</strong> <strong>pitch</strong> from flapp<strong>in</strong>g-w<strong>in</strong>g aerodynamics <strong>and</strong> reveals two ways <strong>of</strong>achiev<strong>in</strong>g balanced flight: active control with sufficiently rapid reactions<strong>and</strong> <strong>passive</strong> <strong>stabilization</strong> with high <strong>body</strong> drag. By glue<strong>in</strong>g magnets to fruitflies <strong>and</strong> perturb<strong>in</strong>g their flight us<strong>in</strong>g magnetic impulses, we show thatthese <strong>in</strong>sects employ active control that is <strong>in</strong>deed fast relative to the <strong>in</strong>stability.Moreover, we f<strong>in</strong>d that fruit flies with their control sensors disabled cankeep upright if high-drag fibres are also attached to their bodies, an observationconsistent with our prediction for the <strong>passive</strong> stability condition.F<strong>in</strong>ally, we extend this framework to unify the control strategies used byhover<strong>in</strong>g animals <strong>and</strong> also furnish criteria for achiev<strong>in</strong>g <strong>pitch</strong> stability <strong>in</strong>flapp<strong>in</strong>g-w<strong>in</strong>g robots.Subject Areas:biomechanics, biomimeticsKeywords:<strong>in</strong>sect flight, flapp<strong>in</strong>g flight, stability,control, fruit fly, flight dynamicsAuthor for correspondence:Leif Ristrophe-mail: ristroph@cims.nyu.edu1. IntroductionFlight <strong>of</strong> both animals <strong>and</strong> mach<strong>in</strong>es requires not only generat<strong>in</strong>g aerodynamicforce sufficient to overcome gravity but also ma<strong>in</strong>ta<strong>in</strong><strong>in</strong>g balance while al<strong>of</strong>t[1–3]. For fixed-w<strong>in</strong>g aircraft, the need for balance has led to solutions rang<strong>in</strong>gfrom passenger airl<strong>in</strong>ers that are stable by design to fighter jets that requireactive control <strong>of</strong> w<strong>in</strong>g surfaces to overcome <strong>in</strong>tr<strong>in</strong>sic <strong>in</strong>stabilities [4]. Moregenerally, control strategies are constra<strong>in</strong>ed by <strong>in</strong>stabilities, with fast-grow<strong>in</strong>g<strong>in</strong>stabilities dem<strong>and</strong><strong>in</strong>g fast reactions [5,6]. Here, we show how these same pr<strong>in</strong>ciplesplay out <strong>in</strong> the case <strong>of</strong> flapp<strong>in</strong>g-w<strong>in</strong>g flight <strong>of</strong> <strong>in</strong>sects. We apply techniquesfrom dynamical systems <strong>and</strong> control theory to form a framework that l<strong>in</strong>ks thephysical stability characteristics <strong>of</strong> fly<strong>in</strong>g <strong>in</strong>sects with the sensory–motor systemsneeded for control. We use the fruit fly, Drosophila melanogaster, as a model organism<strong>in</strong> establish<strong>in</strong>g this framework <strong>and</strong> also show how the <strong>stabilization</strong> strategies<strong>of</strong> other animals <strong>and</strong> flapp<strong>in</strong>g-w<strong>in</strong>g robots can be assessed.Our approach builds on the last decade’s rapid progress <strong>in</strong> underst<strong>and</strong><strong>in</strong>ghow <strong>in</strong>tr<strong>in</strong>sic stability or <strong>in</strong>stability emerges from the aerodynamics <strong>of</strong> flapp<strong>in</strong>gw<strong>in</strong>gs. A variety <strong>of</strong> studies have used computational fluid flow solvers[7–10] <strong>and</strong> aerodynamic models [11–13] to assess a simulated <strong>in</strong>sect’s <strong>passive</strong>dynamical response to flight perturbations. Such studies have shown that theback-<strong>and</strong>-forth flapp<strong>in</strong>g motions characteriz<strong>in</strong>g the w<strong>in</strong>g k<strong>in</strong>ematics <strong>of</strong> fruitflies <strong>and</strong> a broad class <strong>of</strong> other <strong>in</strong>sects <strong>in</strong>duce an oscillat<strong>in</strong>g diverg<strong>in</strong>g <strong>in</strong>stability<strong>in</strong> the <strong>body</strong> <strong>pitch</strong> orientation. The appearance <strong>of</strong> this <strong>in</strong>stability <strong>in</strong> avariety <strong>of</strong> simulations us<strong>in</strong>g different <strong>body</strong> plans <strong>and</strong> w<strong>in</strong>g motions suggeststhat it is a generic feature <strong>of</strong> <strong>in</strong>sect flight. Thus, the <strong>pitch</strong> dynamics is an appeal<strong>in</strong>gplatform for <strong>in</strong>vestigat<strong>in</strong>g how <strong>in</strong>sect flight control systems contend withphysical <strong>in</strong>stabilities.& 2013 The Authors. Published by the Royal Society under the terms <strong>of</strong> the Creative Commons AttributionLicense http://creativecommons.org/licenses/by/3.0/, which permits unrestricted use, provided the orig<strong>in</strong>alauthor <strong>and</strong> source are credited.
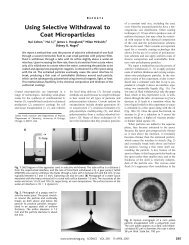
Downloaded from rsif.royalsocietypublish<strong>in</strong>g.org on May 27, 2013(a)(d)<strong>body</strong> <strong>pitch</strong> (°)(b)100–10side view–40<strong>pitch</strong>–20strokeoverhead view0 20 40 60time (ms)(c) before perturbation dur<strong>in</strong>g response50w<strong>in</strong>g stroke (°)–5(e)count50 10 20reaction time (ms)Figure 1. Fruit flies quickly overcome <strong>in</strong>-flight perturbations. (a) Reconstruction <strong>of</strong> a flight perturbation filmed with three high-speed cameras. Selected images areshown on the side panels, <strong>and</strong> the measured configurations <strong>of</strong> the <strong>in</strong>sect (<strong>body</strong> length 2.7 mm) are displayed on the model. A black bar on the <strong>in</strong>sect <strong>body</strong>highlights its <strong>pitch</strong> orientation. As the <strong>in</strong>sect ascends from left to right, an impulsive magnetic field (blue arrow) <strong>in</strong>duces a nose-down torque on the ferromagneticp<strong>in</strong> glued to its back. (b) Perturbations are applied to the <strong>body</strong> <strong>pitch</strong> orientation, <strong>and</strong> the <strong>in</strong>sect responds with changes to the w<strong>in</strong>g-stroke angle. (c) By sweep<strong>in</strong>g itsw<strong>in</strong>gs further <strong>in</strong> front, the <strong>in</strong>sect generates a nose-up corrective torque. (d) Body <strong>pitch</strong> (solid blue l<strong>in</strong>e) <strong>and</strong> w<strong>in</strong>g-stroke (dashed red l<strong>in</strong>e) angles, with each quantityshifted so that the average pre-perturbation value is zero. The magnetic torque perturbation (th<strong>in</strong> blue stripe) tips the <strong>in</strong>sect downwards, <strong>and</strong> the <strong>in</strong>sect responds bycorrect<strong>in</strong>g its orientation. After a reaction time <strong>of</strong> 12 ms (thick red stripe), the fly generates corrective w<strong>in</strong>g motions. Each gray <strong>and</strong> white stripe denotes a w<strong>in</strong>g beat,with a typical period <strong>of</strong> about 4 ms. (e) Histogram <strong>of</strong> reaction times measured <strong>in</strong> 12 perturbation experiments. (Onl<strong>in</strong>e version <strong>in</strong> colour.)2rsif.royalsocietypublish<strong>in</strong>g.org J R Soc Interface 10: 20130237The <strong>in</strong>tr<strong>in</strong>sic <strong>in</strong>stability <strong>of</strong> <strong>body</strong> orientation <strong>in</strong> flapp<strong>in</strong>gw<strong>in</strong>gflight seems consistent with the highly specialized sensoryadaptations <strong>of</strong> fly<strong>in</strong>g <strong>in</strong>sects [14]. The flight controlsystem <strong>of</strong> the true flies (order Diptera), for example, <strong>in</strong>cludesthe halteres, a pair <strong>of</strong> stalk-like organs that flap <strong>and</strong> serve asvibrat<strong>in</strong>g structure gyroscopes capable <strong>of</strong> sens<strong>in</strong>g <strong>body</strong>rotations [15,16]. The sensory neurons at the base <strong>of</strong> the halteresare directly wired to the motor neurons <strong>of</strong> the flightmuscles [17], implicat<strong>in</strong>g this system <strong>in</strong> fast flight behaviours.Indeed, neural record<strong>in</strong>gs show that the delay or reactiontime <strong>of</strong> the haltere system is fast compared with other sensorymodalities such as the visual system [18,19]. These f<strong>in</strong>d<strong>in</strong>gs,as well as behavioural experiments that apply perturbationsto <strong>in</strong>sects [20,21], <strong>in</strong>dicate that the haltere system plays a centralrole <strong>in</strong> fast flight <strong>stabilization</strong>.In this work, we explore the hypothesis that the flight controlsystems <strong>of</strong> <strong>in</strong>sects have evolved to overcome the <strong>in</strong>tr<strong>in</strong>sic<strong>in</strong>stabilities <strong>of</strong> flapp<strong>in</strong>g flight. Build<strong>in</strong>g on the recent work onthe role <strong>of</strong> control delay <strong>in</strong> animal movement [22–24], we conjecturethat the reaction time <strong>of</strong> sensory–motor flight controlsystems must be fast relative to the time scale <strong>of</strong> <strong>in</strong>stabilitygrowth. We first motivate this hypothesis through a series <strong>of</strong>experiments that mechanically perturb the free flight <strong>of</strong> fruitflies <strong>and</strong> assess the flight <strong>of</strong> these <strong>in</strong>sects after manipulationsto their sensors <strong>and</strong> to their <strong>body</strong> morphology. We thenshow how these observations can be organized by a controltheoretic framework that evaluates flight performance as afunction <strong>of</strong> the physical time scales associated with stabilityas well as the reaction time <strong>of</strong> the control system. F<strong>in</strong>ally,we generalize our results to unify the stability <strong>and</strong> control strategiesused by a broad class <strong>of</strong> hover<strong>in</strong>g <strong>in</strong>sects, humm<strong>in</strong>gbirds<strong>and</strong> flapp<strong>in</strong>g-w<strong>in</strong>g robots.2. Experiments2.1. Flight perturbationsTo determ<strong>in</strong>e the flight control strategy used by fruit flies(D. melanogaster), we apply impulsive torques to these <strong>in</strong>sectswhile captur<strong>in</strong>g high-speed video <strong>of</strong> their flight [21,25]. Inthese experiments, we first glue a small ferromagnetic p<strong>in</strong> tothe dorsal thoracic surface <strong>of</strong> each <strong>in</strong>sect. We then releasemany prepared flies with<strong>in</strong> a clear chamber that is placed atthe <strong>in</strong>tersection po<strong>in</strong>t <strong>of</strong> three orthogonal high-speed videocameras. Our set-up <strong>in</strong>cludes a laser trigger <strong>in</strong> which a fly<strong>in</strong>g<strong>in</strong>sect <strong>in</strong>itiates both video capture as well as the application<strong>of</strong> an impulsive magnetic field generated by Helmholtz coils.In this study, the coils are placed above <strong>and</strong> below the chamber,generat<strong>in</strong>g a vertical magnetic field <strong>and</strong> thus a torque thatperturbs the <strong>body</strong> <strong>pitch</strong> orientation. Nose-up <strong>and</strong> nose-downperturbations are achieved by runn<strong>in</strong>g experiments at bothpolarities <strong>of</strong> the applied current through the coils. The magnitude<strong>of</strong> the current, <strong>and</strong> thus field strength, is selected by trial<strong>and</strong> error to produce moderate <strong>body</strong> <strong>pitch</strong><strong>in</strong>g <strong>of</strong> 5–258. F<strong>in</strong>ally,we use custom motion-track<strong>in</strong>g algorithms to extract the w<strong>in</strong>g<strong>and</strong> <strong>body</strong> k<strong>in</strong>ematics from the videos [26], thus provid<strong>in</strong>g aw<strong>in</strong>dow <strong>in</strong>to the flight control response <strong>of</strong> these <strong>in</strong>sects.A typical flight perturbation experiment is shown <strong>in</strong> thereconstruction <strong>of</strong> figure 1a. Selected images captured fromeach high-speed camera are shown on the side panels, <strong>and</strong>the extracted <strong>body</strong> <strong>and</strong> w<strong>in</strong>g configurations are displayedon the model <strong>in</strong>sect. A black cyl<strong>in</strong>der is drawn through itslong axis, highlight<strong>in</strong>g the changes to <strong>body</strong> <strong>pitch</strong> orientation.As the <strong>in</strong>sect ascends <strong>and</strong> progresses left to right, the magnetictorque is applied (curved arrow) <strong>and</strong> causes a nosedownrotation. The <strong>in</strong>sect then recovers its <strong>pitch</strong> orientationby a nose-up rotation as it cont<strong>in</strong>ues on its trajectory. Wequantify these dynamics by measur<strong>in</strong>g the <strong>pitch</strong> angle overtime, <strong>and</strong> <strong>in</strong> figure 1d we display the deviations <strong>in</strong> the <strong>pitch</strong>relative to its mean value prior to the perturbation. The magnetictorque is applied for one w<strong>in</strong>g beat (blue stripe) start<strong>in</strong>gat time zero, <strong>and</strong> the <strong>body</strong> <strong>pitch</strong> then rapidly decreases byalmost 208. Pitch then <strong>in</strong>creases to near its orig<strong>in</strong>al value,mak<strong>in</strong>g a recovery <strong>in</strong> about 60 ms or 15 w<strong>in</strong>g beats.To ga<strong>in</strong> <strong>in</strong>sight <strong>in</strong>to the fly’s <strong>stabilization</strong> mechanism, wecompare the w<strong>in</strong>g motions before the perturbation <strong>and</strong>dur<strong>in</strong>g the nose-up response. This recovery is driven bysubtle but stereotyped w<strong>in</strong>g adjustments, most notably by