L<strong>and</strong>scape Ecol<strong>Forest</strong> L<strong>and</strong>scape Simulation Modelsexcluding spatialinteractionsincluding spatialinteractionsstaticcommunitiesdynamiccommunitiesstaticcommunitiesdynamiccommunitiesexcludingecosystemprocessesincludingecosystemprocessesexcludingecosystemprocessesGroup 1 Group 2 Group 3DOLY 2 TEM-LPJ 5MAPSS 1,2 IBIS 3 NoneBIOME2 2 MC1 4includingecosystemprocessesexcludingecosystemprocessesincludingecosystemprocessesexcludingecosystemprocessesincludingecosystemprocessesGroup 4 Group 5 Group 6 Group 7 Group 8ForClim 7 TELSA 8 MC1 4 LANDIS 13 FIRE-BGC 16EMBYR 10HARVEST 9MetaFor 14 LANDIS-II 17LINKAGES 6 VDDT/ SEM-LAND 11 LANDSIM 12 FACET 15Fig. 1 An example decision tree based on three ecologicalcriteria: inclusion of spatial interactions, static or dynamiccommunities, <strong>and</strong> inclusion of ecosystem processes. Theorder of the decision tree can be reconfigured, dependentupon the individual’s ranking of the three criteria. Groupnumbers correspond to the group labels in the text. Two orthree exemplar models are provided for each group.Subscripts.1 Neilson (1995);2 VEMAP Members (1995);3 Foley et al. (1996); 4 Bachelet et al. (2001a, b); 5 Pan et al.(2002);6 Pastor <strong>and</strong> Post (1986a);7 Bugmann (1996);8 Klenner et al. (2000);9 Gustafson <strong>and</strong> Crow (1998);10 Hargrove et al. (2000); 11 Li (2000); 12 Roberts (1996b);13 <strong>Mladenoff</strong> et al. (1996); 14 Urban et al. (1999); 15 Urban<strong>and</strong> Shugart (1992); 16 Keane et al. (1996); 17 <strong>Scheller</strong> et al.(in review)patterning at multiple scales <strong>and</strong> thereforecontribute to the evolution of l<strong>and</strong>scape pattern<strong>and</strong> changes in spatial heterogeneity. Examplesof spatial interactions include the dispersalof seeds, a fire spreading, the movement ofherbivores, <strong>and</strong> neighboring trees competing forlight.Essential to the simulation of spatial interactionsis the representation of spatial information<strong>and</strong> the neighborhood structure. Vector polygonsare contiguous areas that can have any size orshape within the maximum extent of the l<strong>and</strong>scape(Fig. 2A). Vector polygons assume withinpolygonhomogeneity. Spatial interactions amongvector polygons are often limited to first-orderneighbors, defined by a shared edge betweenpolygons (Fig. 2A). A l<strong>and</strong>scape can also bebroken into a grid of equal sized, typically squareor hexagonal, cells. Spatial interactions amongcells can be defined by either neighborhoods (e.g.,the 4, 8, or 12 nearest neighbors; Fig. 2B) <strong>and</strong>/orcan be a function of the distance between cellcenter points (Fig. 2C), thereby allowing moreflexibility in spatial interactions than vector polygons(<strong>Mladenoff</strong> <strong>and</strong> He 1999; <strong>Mladenoff</strong> <strong>and</strong>Baker 1999b).Every representation of spatial interactionsincurs a computational penalty. Finer resolutionspatial interactions (e.g., neighborhood shading)will incur a larger computational penalty thancoarse-scale interactions (e.g., the dispersion oflarge clear-cut patches). The computational costof a spatial interaction is sensitive to l<strong>and</strong>scaperesolution <strong>and</strong> increases non-linearly withdecreasing cell size.Finally, the simulation of a particular spatialinteraction may not be appropriate for a givenhypothesis or scale (Peters et al. 2004). Forexample, at continental scales, most l<strong>and</strong>scapevariation will be explained by patterns of temperature<strong>and</strong> precipitation. Conversely, shorttermprojections may not require estimates ofcontinental tree species migrations. If spatialinteractions provide only a marginal increase inpredictive power, the additional complexity,computational overhead, <strong>and</strong> parameterizationrequired may not warrant their inclusion (Peterset al. 2004).123
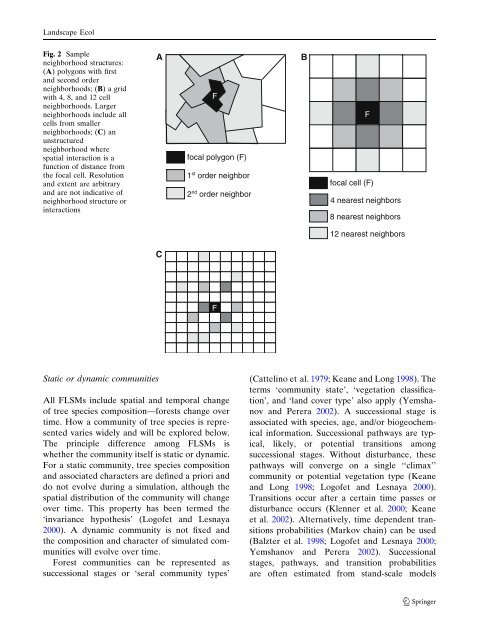
L<strong>and</strong>scape EcolFig. 2 Sampleneighborhood structures:(A) polygons with first<strong>and</strong> second orderneighborhoods; (B) a gridwith 4, 8, <strong>and</strong> 12 cellneighborhoods. Largerneighborhoods include allcells from smallerneighborhoods; (C) anunstructuredneighborhood wherespatial interaction is afunction of distance fromthe focal cell. Resolution<strong>and</strong> extent are arbitrary<strong>and</strong> are not indicative ofneighborhood structure orinteractionsAFfocal polygon (F)1 st order neighbor2 nd order neighborBFfocal cell (F)4 nearest neighbors8 nearest neighbors12 nearest neighborsCFStatic or dynamic communitiesAll FLSMs include spatial <strong>and</strong> temporal changeof tree species composition—forests change overtime. How a community of tree species is representedvaries widely <strong>and</strong> will be explored below.The principle difference among FLSMs iswhether the community itself is static or dynamic.For a static community, tree species composition<strong>and</strong> associated characters are defined a priori <strong>and</strong>do not evolve during a simulation, although thespatial distribution of the community will changeover time. This property has been termed the‘invariance hypothesis’ (Logofet <strong>and</strong> Lesnaya2000). A dynamic community is not fixed <strong>and</strong>the composition <strong>and</strong> character of simulated communitieswill evolve over time.<strong>Forest</strong> communities can be represented assuccessional stages or ‘seral community types’(Cattelino et al. 1979; Keane <strong>and</strong> Long 1998). Theterms ‘community state’, ‘vegetation classification’,<strong>and</strong> ‘l<strong>and</strong> cover type’ also apply (Yemshanov<strong>and</strong> Perera 2002). A successional stage isassociated with species, age, <strong>and</strong>/or biogeochemicalinformation. Successional pathways are typical,likely, or potential transitions amongsuccessional stages. Without disturbance, thesepathways will converge on a single ‘‘climax’’community or potential vegetation type (Keane<strong>and</strong> Long 1998; Logofet <strong>and</strong> Lesnaya 2000).Transitions occur after a certain time passes ordisturbance occurs (Klenner et al. 2000; Keaneet al. 2002). Alternatively, time dependent transitionsprobabilities (Markov chain) can be used(Balzter et al. 1998; Logofet <strong>and</strong> Lesnaya 2000;Yemshanov <strong>and</strong> Perera 2002). Successionalstages, pathways, <strong>and</strong> transition probabilitiesare often estimated from st<strong>and</strong>-scale models123