Interaction with co-located haptic feedback in virtual reality
Interaction with co-located haptic feedback in virtual reality
Interaction with co-located haptic feedback in virtual reality

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
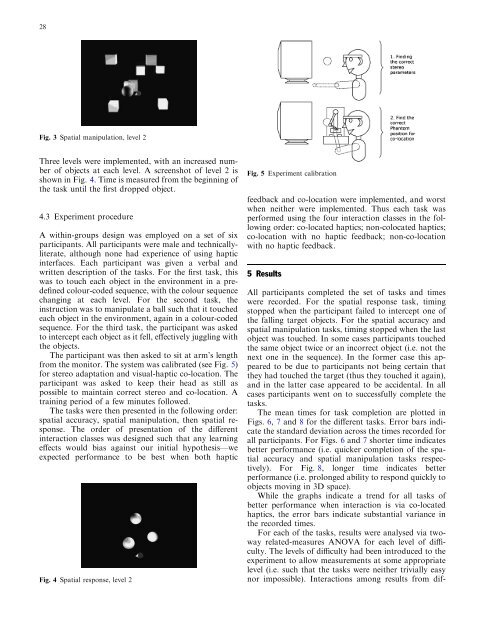
28Fig. 3 Spatial manipulation, level 2Three levels were implemented, <strong>with</strong> an <strong>in</strong>creased numberof objects at each level. A screenshot of level 2 isshown <strong>in</strong> Fig. 4. Time is measured from the beg<strong>in</strong>n<strong>in</strong>g ofthe task until the first dropped object.4.3 Experiment procedureA <strong>with</strong><strong>in</strong>-groups design was employed on a set of sixparticipants. All participants were male and technicallyliterate,although none had experience of us<strong>in</strong>g <strong>haptic</strong><strong>in</strong>terfaces. Each participant was given a verbal andwritten description of the tasks. For the first task, thiswas to touch each object <strong>in</strong> the environment <strong>in</strong> a predef<strong>in</strong>ed<strong>co</strong>lour-<strong>co</strong>ded sequence, <strong>with</strong> the <strong>co</strong>lour sequencechang<strong>in</strong>g at each level. For the se<strong>co</strong>nd task, the<strong>in</strong>struction was to manipulate a ball such that it touchedeach object <strong>in</strong> the environment, aga<strong>in</strong> <strong>in</strong> a <strong>co</strong>lour-<strong>co</strong>dedsequence. For the third task, the participant was askedto <strong>in</strong>tercept each object as it fell, effectively juggl<strong>in</strong>g <strong>with</strong>the objects.The participant was then asked to sit at arm’s lengthfrom the monitor. The system was calibrated (see Fig. 5)for stereo adaptation and visual-<strong>haptic</strong> <strong>co</strong>-location. Theparticipant was asked to keep their head as still aspossible to ma<strong>in</strong>ta<strong>in</strong> <strong>co</strong>rrect stereo and <strong>co</strong>-location. Atra<strong>in</strong><strong>in</strong>g period of a few m<strong>in</strong>utes followed.The tasks were then presented <strong>in</strong> the follow<strong>in</strong>g order:spatial accuracy, spatial manipulation, then spatial response.The order of presentation of the different<strong>in</strong>teraction classes was designed such that any learn<strong>in</strong>geffects would bias aga<strong>in</strong>st our <strong>in</strong>itial hypothesis—weexpected performance to be best when both <strong>haptic</strong>Fig. 4 Spatial response, level 2Fig. 5 Experiment calibration<strong>feedback</strong> and <strong>co</strong>-location were implemented, and worstwhen neither were implemented. Thus each task wasperformed us<strong>in</strong>g the four <strong>in</strong>teraction classes <strong>in</strong> the follow<strong>in</strong>gorder: <strong>co</strong>-<strong>located</strong> <strong>haptic</strong>s; non-<strong>co</strong><strong>located</strong> <strong>haptic</strong>s;<strong>co</strong>-location <strong>with</strong> no <strong>haptic</strong> <strong>feedback</strong>; non-<strong>co</strong>-location<strong>with</strong> no <strong>haptic</strong> <strong>feedback</strong>.5 ResultsAll participants <strong>co</strong>mpleted the set of tasks and timeswere re<strong>co</strong>rded. For the spatial response task, tim<strong>in</strong>gstopped when the participant failed to <strong>in</strong>tercept one ofthe fall<strong>in</strong>g target objects. For the spatial accuracy andspatial manipulation tasks, tim<strong>in</strong>g stopped when the lastobject was touched. In some cases participants touchedthe same object twice or an <strong>in</strong><strong>co</strong>rrect object (i.e. not thenext one <strong>in</strong> the sequence). In the former case this appearedto be due to participants not be<strong>in</strong>g certa<strong>in</strong> thatthey had touched the target (thus they touched it aga<strong>in</strong>),and <strong>in</strong> the latter case appeared to be accidental. In allcases participants went on to successfully <strong>co</strong>mplete thetasks.The mean times for task <strong>co</strong>mpletion are plotted <strong>in</strong>Figs. 6, 7 and 8 for the different tasks. Error bars <strong>in</strong>dicatethe standard deviation across the times re<strong>co</strong>rded forall participants. For Figs. 6 and 7 shorter time <strong>in</strong>dicatesbetter performance (i.e. quicker <strong>co</strong>mpletion of the spatialaccuracy and spatial manipulation tasks respectively).For Fig. 8, longer time <strong>in</strong>dicates betterperformance (i.e. prolonged ability to respond quickly toobjects mov<strong>in</strong>g <strong>in</strong> 3D space).While the graphs <strong>in</strong>dicate a trend for all tasks ofbetter performance when <strong>in</strong>teraction is via <strong>co</strong>-<strong>located</strong><strong>haptic</strong>s, the error bars <strong>in</strong>dicate substantial variance <strong>in</strong>the re<strong>co</strong>rded times.For each of the tasks, results were analysed via twowayrelated-measures ANOVA for each level of difficulty.The levels of difficulty had been <strong>in</strong>troduced to theexperiment to allow measurements at some appropriatelevel (i.e. such that the tasks were neither trivially easynor impossible). <strong>Interaction</strong>s among results from dif-