

USER’S MANUAL
Omron SX inverter manual
Omron SX inverter manual

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
PID Steady State Test [388]<br />
In application situations where the feedback can<br />
become independent of the motor speed, this PID<br />
Steady Test function can be used to overrule the PID<br />
operation and force the VSD to go in sleep mode i.e.<br />
the VSD automatically reduces the output speed while<br />
at the same time ensures the process value.<br />
Example: pressure controlled pump systems with low/<br />
no flow operation and where the process pressure has<br />
become independent of the pump speed, e.g. due to<br />
slowly closed valves. By going into Sleep mode, heating<br />
of the pump and motor will be avoided and no<br />
energy is spilled.<br />
PID Steady state test delay.<br />
NOTE: It is important that the system has reached a<br />
stable situation before the Steady State Test is initiated.<br />
Default:<br />
Range:<br />
Off<br />
Off, 0.01–3600 s<br />
Communication information<br />
Modbus Instance no/DeviceNet no: 43373<br />
Profibus slot/index 170/22<br />
Fieldbus format<br />
Modbus format<br />
388 PID Stdy Tst<br />
StpA<br />
Off<br />
Long, 1=0.01 s<br />
EInt<br />
During the steady state test the PID operation is overruled<br />
and the VSD is decreasing the speed as long as<br />
the PID error is within the steady state margin. If the<br />
PID error goes outside the steady state margin the test<br />
failed and normal PID operation continues, see example.<br />
Default: 0<br />
Range:<br />
0–10000 in process unit<br />
Communication information<br />
Modbus Instance no/DeviceNet no: 43374<br />
Profibus slot/index 170/23<br />
Fieldbus format<br />
Modbus format<br />
389 PID Stdy Mar<br />
Stp 0<br />
A<br />
Long, 1=0.01 s<br />
EInt<br />
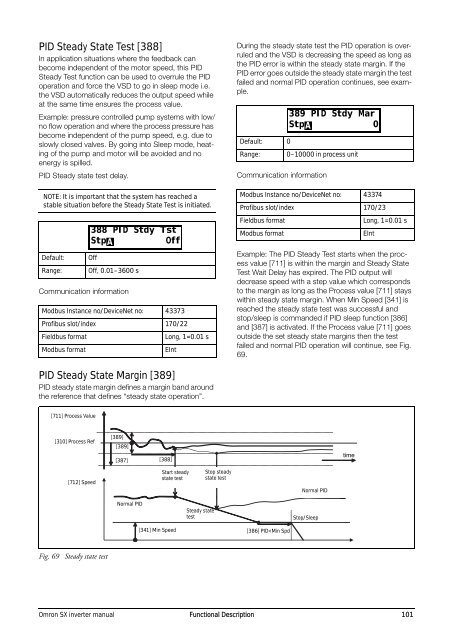
Example: The PID Steady Test starts when the process<br />
value [711] is within the margin and Steady State<br />
Test Wait Delay has expired. The PID output will<br />
decrease speed with a step value which corresponds<br />
to the margin as long as the Process value [711] stays<br />
within steady state margin. When Min Speed [341] is<br />
reached the steady state test was successful and<br />
stop/sleep is commanded if PID sleep function [386]<br />
and [387] is activated. If the Process value [711] goes<br />
outside the set steady state margins then the test<br />
failed and normal PID operation will continue, see Fig.<br />
69.<br />
PID Steady State Margin [389]<br />
PID steady state margin defines a margin band around<br />
the reference that defines “steady state operation”.<br />
[711] Process Value<br />
[310] Process Ref<br />
[389]<br />
[389]<br />
[387]<br />
[388]<br />
time<br />
[712] Speed<br />
Start steady<br />
state test<br />
Stop steady<br />
state test<br />
Normal PID<br />
Normal PID<br />
Steady state<br />
test<br />
Stop/Sleep<br />
[341] Min Speed [386] PID














