


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Меню прикладных функций FUn-<br />
FUn-<br />
AdC-<br />
Код Описание Диапазон<br />
настройки<br />
AdC<br />
tdC1<br />
SdC1<br />
Заводская<br />
настройка<br />
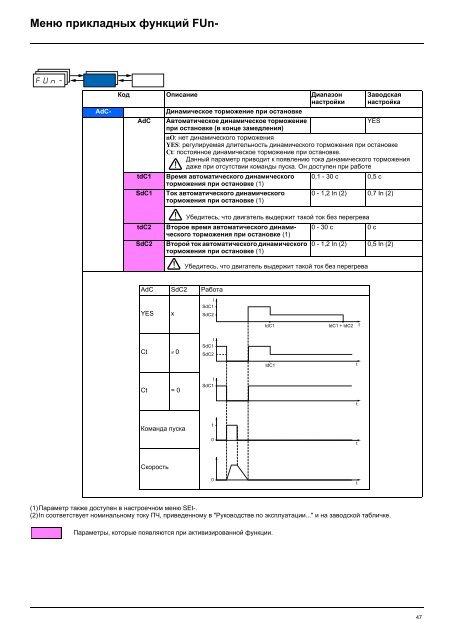
Динамическое торможение при остановке<br />
Автоматическое динамическое торможение<br />
YES<br />
при остановке (в конце замедления)<br />
nO: нет динамического торможения<br />
YES: регулируемая длительность динамического торможения при остановке<br />
Ct: постоянное динамическое торможение при остановке.<br />
Данный параметр приводит к появлению тока динамического торможения<br />
даже при отсутствии команды пуска. Он доступен при работе<br />
Время автоматического динамического 0,1 - 30 с 0,5 с<br />
торможения при остановке (1)<br />
Ток автоматического динамического<br />
торможения при остановке (1)<br />
0 - 1,2 In (2) 0,7 In (2)<br />
tdC2<br />
SdC2<br />
Убедитесь, что двигатель выдержит такой ток без перегрева<br />
Второе время автоматического динамического<br />
торможения при остановке (1)<br />
Второй ток автоматического динамического<br />
торможения при остановке (1)<br />
0 - 30 с 0 с<br />
0 - 1,2 In (2) 0,5 In (2)<br />
Убедитесь, что двигатель выдержит такой ток без перегрева<br />
AdC SdC2 Работа<br />
I<br />
YES<br />
x<br />
SdC1<br />
SdC2<br />
tdC1<br />
tdC1 + tdC2<br />
t<br />
I<br />
Ct ≠ 0<br />
SdC1<br />
SdC2<br />
tdC1<br />
t<br />
I<br />
Ct = 0<br />
SdC1<br />
t<br />
Команда пуска<br />
1<br />
0<br />
t<br />
Скорость<br />
0<br />
t<br />
(1)Параметр также доступен в настроечном меню SEt-.<br />
(2)In соответствует номинальному току ПЧ, приведенному в "Руководстве по эксплуатации..." и на заводской табличке.<br />
Параметры, которые появляются при активизированной функции.<br />
47













