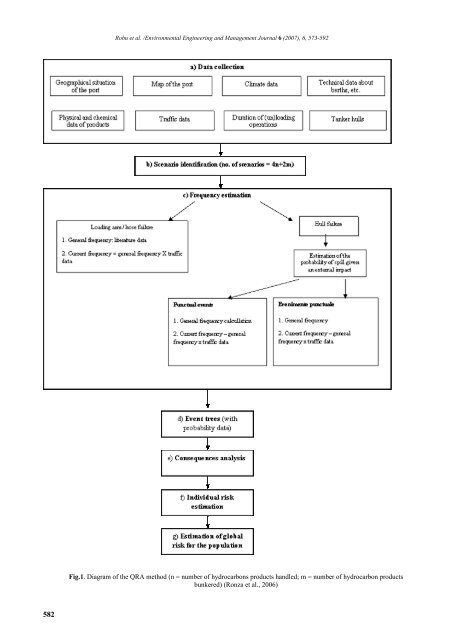
Robu et al. /Environmental Engineering and Management Journal 6 (<strong>2007</strong>), 6, 573-592 Fig.1. Diagram of the QRA method (n = number of hydrocarbons products handled; m = number of hydrocarbon products bunkered) (Ronza et al., 2006) 582
Methods and procedures for environmental risk assessment Initiating event Upward release Immediate ignition Delayed ignition Flame front acceleration Final events Overall probabilities Fig. 2. Event tree diagram 4.2.7. Estimation of overall risk for population By integrated the product of R by the local population density over spatial coordinates, the global risk for a given accident scenario is obtained. By adding up the several R functions (one of each scenario), a global risk function is obtained. In order to estimate the number of injuries and evacuated people, historical data were used. The average ratios of injured people/evacuees to fatalities have been estimated to the followings: • 2.21 injured people for each fatality, • 220 evacuees for each fatality. This data were obtained from processing of 1033 port area accidents from which only 428 occurred during bulk hydrocarbon (un)loading and tanker movement/maneuvers were retained. The general ration should be used whenever the present QRA conceptual approach is applied to a port, because the scenarios, as they have been designed and structured, entail both (un)loading and ship maneuver/ approach operations. Nevertheless, the operation specific values can be used for studies that focus on a particular stage in port hydrocarbon logistics. 5. Mathematic models for environmental analysis and assessment The modeling of the environmental systems is a very difficult problem owing to their complexity, as well to the complexity of their interaction with different other systems, interaction that is sometimes hard to be defined. In this paper, two environmental mathematic models are described. The first is a probabilistic model for risk evaluation that uses a repartition function for a random vector that describes the concentrations of the atmospheric pollutant factors. The latter is an optimization model based on multiple criteria, to appropriate financial funds for pollution reduction. For the second model, the solving modality consists in reduction to an optimization problem with a single objective function. Environmental protection against pollution is a priority not only for the European Union but also for the countries that wish to joint to EU, countries that make efforts for harmonization of the specific legislation. The community environmental policy is based on its integration within the EU sequential policies, paying a special attention to the measures for pollution prevention. There are numerous concerns related to air, water and soil pollution generated by exceeding the limit concentrations of different pollutants, around the whole world. For pollution reduction there were conceived mathematic models by different complexities. Most of them refer to air, soil, water, air-water, air-soil, soil-water pollution. The main types of models are based on differential deterministic and stochastic equations (ordinary differential equations, equations with partial derivates), algebraic static equations, Petri networks, mathematic or stochastic programming, optimal control theory, Markov chains, Markov processes, Monte Carlo simulation and models based on mathematic equations (Radulescu, 2002). Environmental risk management is a relative new term in literature. This refers both to the risk and its effects diminishing measures. 583