Evaluation Test-3 - autosar
Evaluation Test-3 - autosar
Evaluation Test-3 - autosar

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Implementation and <strong>Evaluation</strong> of AUTOSAR Software<br />
Japan<br />
Automotive<br />
Software<br />
Platform<br />
and<br />
Architecture<br />
JASPAR NATIONAL PROJECT<br />
Kazutaka Adachi<br />
May 13 th 2010<br />
Leader of National Project<br />
( EV Powertrain Engineering Department, )<br />
Nissan Motor Co.,ltd.<br />
JASPAR, General incorporated association
OUTLINE<br />
Project Framework<br />
Framework<br />
Organization<br />
Action Plan<br />
JASPAR’s Approach to AUTOSAR Software<br />
<strong>Test</strong><br />
Improvement of Basic Software<br />
JASPAR Tool Framework<br />
JASPAR BSW <strong>Evaluation</strong><br />
<strong>Test</strong> Vehicles<br />
Results<br />
Conclusion<br />
Japan Automotive Software Platform and Architecture
Project Framework
Framework<br />
<br />
Embedded Software Companies<br />
Software Development Tool Companies<br />
<br />
Car Makers<br />
Tier-1 Suppliers<br />
Semiconductor Companies<br />
Information-Technology<br />
Promotion Agency, Japan<br />
(情報処理推進機構)<br />
Cooperation<br />
JASPAR<br />
Match ●Support of Development Cost of M&S *2<br />
METI *1 ; Ministry of Economy, Trade and Industry<br />
Companies<br />
●Opportunity of Cooperation between<br />
Leading Companies and M&S Companies<br />
●Progress Management of This Project<br />
Japan Automotive Software Platform and Architecture<br />
METI *1<br />
(経済産業省)<br />
Support<br />
M&S *2 ; Medium Sized and Small Companies
Organization<br />
JASPAR<br />
Board of Directors<br />
Steering Committee<br />
JASPAR administrator<br />
Basic Software Development Project for Automotive Electronics Controller<br />
自動車向け共通基盤ソフトウェア開発事業<br />
Working Committee<br />
(Nissan, Toyota, Honda,Denso, Toyta Tusho Electronics)<br />
Basic Software Taskforce<br />
Drawing Specification of Implementation Role, And <strong>Evaluation</strong> of Basic Software<br />
Development Tool Taskforce<br />
Drawing Specification of Development Toll for Basic Software, And <strong>Evaluation</strong> of It<br />
Process Taskforce<br />
Proof Experiment of IPA/SEC Technology, and Research of Development Embedded<br />
Software Process for Automotive Electronics Controller<br />
Software <strong>Evaluation</strong> Team<br />
Application of Automotive Electronics Control System,<br />
And <strong>Evaluation</strong> of Basic Software<br />
Japan Automotive Software Platform and Architecture
Schedule<br />
FY 2007<br />
1st 2nd 3rd 4th<br />
AUTOSAR Rel. 2.1<br />
BSW<br />
Share / Implementation<br />
AUTOSAR Rel. 2.1<br />
Tool<br />
Share / Implementation<br />
<strong>Evaluation</strong><br />
Plan<br />
Plan<br />
FY 2008<br />
1st 2nd 3rd 4th<br />
AUTOSAR Rel. 3.0<br />
BSW<br />
Implementation<br />
AUTOSAR Rel. 3.0<br />
Tool<br />
Implementation<br />
JASPAR Concept<br />
<strong>Test</strong> System<br />
Preparation<br />
Preparation<br />
Japan Automotive Software Platform and Architecture<br />
FY 2009<br />
1st 2nd 3rd 4th<br />
JASPAR BSW<br />
#1 #2<br />
<strong>Evaluation</strong> <strong>Evaluation</strong><br />
JASPAR Tool<br />
#1 #2<br />
Application of<br />
AUTOSAR<br />
Software<br />
Proof <strong>Test</strong><br />
★<br />
Application of<br />
JASPAR<br />
Software
JASPAR’s Approach to AUTOSAR Software
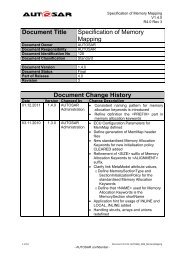
JASPAR Key Concept<br />
Achieve the best solution between “Performance” and “Reusability” of the<br />
AUTOSAR BSW<br />
Our approach:<br />
Reduce the number of API of AUTOSAR BSWs depending on the target system<br />
(Profiling)<br />
CAN Cluster<br />
ROM Usage<br />
Integrate each possible AUTOSAR BSWs and reduce the overhead of each<br />
functions (Clustering)<br />
Reduce of API<br />
Image Example<br />
Integrate BSW<br />
高<br />
High<br />
Performance<br />
Low<br />
低<br />
Reusability<br />
Japan Automotive Software Platform and Architecture<br />
低<br />
従来<br />
Legacy<br />
JASPAR<br />
JASPAR<br />
AUTOSAR<br />
高<br />
Low High<br />
JASPAR Concept Image
Purpose of Profiling<br />
Performance Improvement of AUTOSAR BSW<br />
(性能向上)<br />
Achieve “resource reduction” and “performance improvement” by<br />
remove redundant specification (APIs)<br />
(冗長な仕様を削除することで「消費リソース削減」と「パフォーマンス向上」を実現する。)<br />
Workload Reduction of AUTOSAR BSW Configuration<br />
(コンフィグ作業の効率化)<br />
Reduce the workload of BSW configuration by providing template file<br />
for each profile<br />
(膨大なパラメータ設定作業をプロファイルに応じたテンプレートファイル提供で効<br />
率化する。)<br />
Reusability Improvement of AUTOSAR BSW<br />
(再利用の促進)<br />
Improve reusability by the optimized profile specification for real ECU<br />
(実ECUに最適化された仕様により再利用しやすくする。)<br />
Two key concepts of JASPAR Architecture: Profiling, Clustering<br />
Japan Automotive Software Platform and Architecture
JASPAR Concept Adaptation Parts<br />
Profile Concept<br />
System Control<br />
Memory Control<br />
Comm<br />
Control<br />
Real Time OS Low Level Driver (MCAL)<br />
Comm : Communication<br />
Kernel API<br />
Application Layer<br />
Adaptation Layer<br />
Middleware Layer<br />
Middleware API<br />
Communication Stack<br />
Comm Service<br />
CAN<br />
FlexRay<br />
Japan Automotive Software Platform and Architecture<br />
I/O Driver<br />
Kernel Layer<br />
Cluster Concept
Profiling: Reduction of API, depending on the target system<br />
AUTOSAR BSW uses large amount of ROM/RAM, and high load CPU because<br />
It is designed to fulfill all kinds of automotive electronics controllers.<br />
(AUTOSAR仕様は車載電子制御システムの各形態に対応できるように構成されているためマイコン<br />
のリソース消費量が多い.)<br />
JASPAR selected necessary AUTOSAR BSW functions for each control systems.<br />
(JASPARでは各制御システムに必要なソフトウェア機能だけが組み込まれるようにプロファイリング<br />
した。)<br />
Communication Spec<br />
-CAN<br />
-FlexRay<br />
-LIN<br />
-PDURouter<br />
Function A<br />
OS Spec<br />
-Memory Protection<br />
-Timing Protection<br />
○<br />
Function D<br />
Function C<br />
×<br />
×<br />
Memory<br />
Management<br />
MCAL Spec<br />
System<br />
Management<br />
-ECUStateManager<br />
-Lib.....<br />
Function A<br />
Function B<br />
Function C<br />
Function D<br />
Function E<br />
Function B :<br />
○<br />
:<br />
Image of Function selection<br />
Profile-A<br />
○<br />
○<br />
○<br />
○<br />
○<br />
Japan Automotive Software Platform and Architecture<br />
Profile-B<br />
○<br />
○<br />
○<br />
Profile-C<br />
○
What is JASPAR Clustering?<br />
Functional set of individual AUTOSAR BSW modules<br />
(それぞれのAUTOSAR BSWのモジュールを機能毎に設定)<br />
A way to optimize AUTOSAR architecture for the real usage<br />
(実使用に応じてAUTOSARアーキテクチャを最適化)<br />
Spec design<br />
Complete BSW package<br />
Cluster A Cluster B Cluster C<br />
Japan Automotive Software Platform and Architecture<br />
Actor<br />
Tier1<br />
BSW<br />
(ICC1)<br />
Tier2<br />
Cluster<br />
(ICC2)<br />
3 rd Party<br />
BSW Module<br />
(ICC3)
Organization<br />
システム仕様記述<br />
System Specification Description Matlab<br />
System Requirements,<br />
要求獲得、定義<br />
Definitions<br />
ZIPC<br />
UML<br />
Process TF<br />
etc.<br />
プロセスTF<br />
制御アプリケーション<br />
制御アプリケーション<br />
Control application<br />
Software ソフトウェア<br />
ソフトウェア<br />
システム<br />
System<br />
制御システム<br />
【システム設計ツール】 設計 Design<br />
[System ・標準評価アプリ<br />
Design Tool]<br />
制御アプリケーションソフト ツール Tool<br />
Design ・実証実験アプリ<br />
of the system<br />
ウェアの配置を決定<br />
[Software Design Tool]<br />
【ソフト設計ツール】<br />
Implementation Cv of the<br />
制御アプリケーションソフト<br />
system onto JASPAR BSW<br />
ウェアをJASPAR BSW上に実装<br />
自動車用制御基盤<br />
ソフトウェア<br />
Software<br />
(プラットフォーム)<br />
Design<br />
Adaptation アダプテーション層 Layer<br />
ツール Tool<br />
JASPAR-BSW<br />
JASPAR BSW ・高性能・高い実用性<br />
Middleware<br />
ミドルウェア - 仕様・実装の最適化<br />
標準実装TF<br />
(System, Memory,<br />
(システム、メモリ、通信、I/O) - 実装ガイドライン整備<br />
Communication, I/O)<br />
・高信頼性<br />
カーネル(OS、MCAL)<br />
Kernel(OS, MCAL) -JASPARFlexRay対応<br />
Standard Implementation TF<br />
Behavior<br />
Model<br />
Tool (BMT)<br />
System<br />
Template<br />
Description<br />
ソフト設計<br />
System<br />
Design<br />
Tool<br />
Extract ECU of<br />
System<br />
Description<br />
ECU<br />
Generation<br />
ECU<br />
Extract<br />
Tool<br />
ECU<br />
Description<br />
JASPAR<br />
JASPAR<br />
ツールチェーン<br />
Tool-Chain<br />
Design<br />
設計<br />
Information 情報<br />
設計情報export<br />
Design Information<br />
ツール Export Tool<br />
ECU<br />
Configuration<br />
Tool<br />
OS<br />
C、Hコード<br />
COM<br />
C、Hコード<br />
Tool RTE<br />
C、Hコード<br />
開発ツールTF<br />
Tool TF<br />
Japan Automotive Software Platform and Architecture<br />
システム検証<br />
Tool<br />
ツール<br />
-Bus ◆バスモニター<br />
バスモニター Monitoring<br />
-Adaptation ◆適合ツールTool<br />
-SILS ◆SILS<br />
-SPILS ◆SPILS<br />
-HILS<br />
◆HILS<br />
【検証ツール】<br />
[Verification Tool]<br />
Verifying 実装されたソフトウェアの<br />
the ソフト検証ツール<br />
software<br />
implementation<br />
動作を検証<br />
-CPU<br />
◆CPU CPUシミュレータ・<br />
Simulator<br />
シミュレータ・<br />
Debugger, ISS<br />
デバッガ・ISS<br />
-Code Checker<br />
◆コードチェッカ<br />
制御アプリケーション<br />
Control application -Software Unit test tool<br />
制御アプリケーション ◆モジュール単体<br />
Software ソフトウェア<br />
ソフトウェア テストツール<br />
Adaptation アダプテーション層 Layer<br />
JASPAR BSW<br />
Middleware<br />
ミドルウェア<br />
(System, Memory,<br />
(システム、メモリ、通信、I/O)<br />
Communication, I/O)<br />
Kernel カーネル(OS、MCAL)<br />
(OS, MCAL)<br />
System Verification<br />
TF: Task Force
JASPAR Tool Chain<br />
JASPAR Tool Chain(from design to verification)<br />
Specification<br />
draw tool<br />
.XML<br />
System<br />
Configuration<br />
Input<br />
Traceable<br />
request<br />
Need to corroborate<br />
with a lot of tools for<br />
mass production<br />
development<br />
Configure<br />
System<br />
.XML<br />
System<br />
Configuration<br />
Description<br />
Extract<br />
ECU Specific<br />
Information<br />
System design tool<br />
System Reduction<br />
configuration parameter<br />
tool information<br />
ECU<br />
extract<br />
tool<br />
.XML<br />
Extract of<br />
System<br />
Configuration<br />
Description<br />
AUTOSAR Methodology Scope<br />
Configure<br />
ECU<br />
.XML<br />
ECU Generate<br />
Configuration Executable<br />
Description<br />
Reduction ConfigurationReduction<br />
Generator<br />
parameter editor parameter<br />
information<br />
information<br />
JASPAR tool framework original function<br />
(Simplification of new entry company)<br />
Artop, Artop, Eclipse, Eclipse, and and etc. etc. (Open (Open Source Source Platform) Platform)<br />
JASPAR tool framework object<br />
The cooperation among tools is easy and strong.<br />
A new company join in JASPAR tool framework easily.<br />
Configuration<br />
tool<br />
Japan Automotive Software Platform and Architecture<br />
Corroboration with<br />
verification tool, outside<br />
AUTOSAR methodology range<br />
Generator<br />
各ツールの連携を容易にし、強化する枠組み。各種ツールの新規参入の容易化が図れる。<br />
.exe<br />
ECU<br />
Executable<br />
Verification<br />
toll I/F<br />
Verification tool<br />
Verification<br />
tool<br />
Verification<br />
tool<br />
Simplification of<br />
correspondence for<br />
JASPAR original function
JASPAR BSW <strong>Evaluation</strong>
<strong>Evaluation</strong> Approach<br />
JASPAR implemented the AUTOSAR software based on<br />
AUTOSAR specification release 3.0.<br />
In evaluation, “AUTOSAR Software” means JASPAR<br />
implemented AUTOSAR BSW based on Rel. 3.0 specification<br />
In evaluation, “JASPAR BSW” means JASPAR implemented<br />
AUTOSAR BSW with JASPAR concept.<br />
Japan Automotive Software Platform and Architecture
Automotive Controller Feature<br />
Soft Real Time : The time restriction is loose.<br />
Powertrain<br />
ITS<br />
Body<br />
Engine<br />
AT/CVT<br />
Motor<br />
Distance<br />
Lane Keep<br />
Body Control<br />
Battery<br />
AFS<br />
Resource<br />
> Minimum ROM/RAM size<br />
> Minimum processing load<br />
Soft Real Time<br />
Time Driven Event Driven<br />
Hard Real Time<br />
Hard Real Time<br />
Time Driven Event Driven<br />
Japan Automotive Software Platform and Architecture<br />
: The time restriction is strict.<br />
> Top priority of the event<br />
processing<br />
> Following processing<br />
time strictly after the<br />
event<br />
> Minimum sampling time<br />
and synchronous time<br />
system.<br />
> 2ch AD conversion at<br />
the same time<br />
> High quality<br />
> Allotment development between OEM and tier-1 supplier<br />
> Frequent specification change, and a lot of variation<br />
development
<strong>Evaluation</strong> <strong>Test</strong> Construction<br />
Measuring<br />
instruments<br />
Pseudosignal<br />
generation device<br />
Oscilloscope<br />
Pseudosignal<br />
generation device<br />
input/output<br />
signal<br />
Software development<br />
environment<br />
Personal<br />
Computer<br />
Compiler<br />
Debugger<br />
Program<br />
<strong>Evaluation</strong> application<br />
<strong>Evaluation</strong> object<br />
BSW<br />
<strong>Evaluation</strong> board<br />
CAN/FlexRay<br />
Japan Automotive Software Platform and Architecture<br />
Power<br />
Supply<br />
CAN/FlexRay<br />
Bus Monitor
<strong>Evaluation</strong> <strong>Test</strong>-2 : Program Construction<br />
Top priority job : Crank sensor signal processing<br />
<br />
Engine Control Component<br />
(ENG)<br />
Standardized<br />
Interface<br />
Operating<br />
System<br />
Standardized<br />
Inteface<br />
AU TOS AR<br />
Interface<br />
Standardized<br />
Interface<br />
Communication<br />
Standardized<br />
Interface<br />
AUTOSAR Software<br />
<br />
Injector Component<br />
(INJ)<br />
Basic Software<br />
AU TOS AR<br />
Interface<br />
RTE<br />
AU TOS AR<br />
Interface<br />
<br />
Injector Driver<br />
(INJD)<br />
GPT<br />
AU TOS AR<br />
Interface<br />
PORT<br />
ECU-Hardware<br />
Standardized<br />
Interface<br />
Microcontroller<br />
Abstraction<br />
<br />
Crank Sensor Component<br />
(CRK)<br />
AU TOS AR<br />
Interface<br />
AU TOS AR<br />
Interface<br />
<strong>Evaluation</strong> System Configuration<br />
CAN<br />
Communication<br />
FlexRay<br />
Communication<br />
<strong>Evaluation</strong><br />
Object<br />
Specification<br />
RTE<br />
OS<br />
Com Cluster<br />
COM<br />
PDUR<br />
Can Cluster<br />
Can If.<br />
Can Sm.<br />
Can Trcv.<br />
Can Drv.<br />
MCAL<br />
<strong>Evaluation</strong><br />
Object<br />
Specification<br />
RTE<br />
OS<br />
Com Cluster<br />
COM<br />
PDUR<br />
FlexRay Cluster<br />
FlexRay If.<br />
FlexRay Sm.<br />
FlexRay Trcv.<br />
FlexRay Drv.<br />
MCAL<br />
AUTOSAR<br />
Comp E<br />
Comp W<br />
-<br />
Comp F<br />
Comp N<br />
AUTOSAR<br />
Comp E<br />
Comp W<br />
-<br />
Comp F<br />
-<br />
-<br />
Comp O<br />
Comp F<br />
Comp N<br />
Vendors-A<br />
Vendors-A<br />
JASPAR JASPAR(R)<br />
Comp E<br />
Comp W<br />
Comp F<br />
-<br />
-<br />
JASPAR<br />
Comp E<br />
Comp W<br />
Comp F<br />
-<br />
Comp O<br />
-<br />
Comp F<br />
Comp N<br />
Comp N<br />
Comp S<br />
Comp N<br />
Japan Automotive Software Platform and Architecture<br />
-<br />
-<br />
AUTOSAR<br />
Comp S<br />
Comp W(SC2)<br />
-<br />
Comp S<br />
-<br />
Comp O<br />
Comp N<br />
AUTOSAR<br />
Comp S<br />
Comp W<br />
Comp S<br />
-<br />
Vendors-B<br />
JASPAR<br />
Comp S<br />
Comp W<br />
Comp S<br />
Comp O<br />
※JASPAR(R) : JASPAR Specification<br />
(Reliability Function)<br />
Vendors-B<br />
JASPAR JASPAR(R)<br />
Comp S<br />
Comp W<br />
Comp S<br />
-<br />
-<br />
-<br />
-<br />
Comp S<br />
-<br />
-<br />
Comp : Company
<strong>Test</strong> Results-3 : <strong>Evaluation</strong> <strong>Test</strong>-2<br />
CAN<br />
45000 -Rte<br />
40000<br />
35000<br />
30000<br />
25000<br />
20000<br />
15000<br />
10000<br />
5000<br />
0<br />
FlexRay<br />
60000<br />
50000<br />
40000<br />
30000<br />
20000<br />
10000<br />
0<br />
23%<br />
reduction<br />
ROM [byte]<br />
Vendors-A Vendors-B<br />
5% reduction<br />
ROM [byte]<br />
29%<br />
reduction<br />
23% reduction<br />
-Os<br />
-PduR<br />
-Com<br />
-CanTrcv<br />
-CanSM<br />
-CanIf<br />
-Can<br />
-SchM<br />
-Gpt<br />
-Mcu<br />
-Dio<br />
-Port<br />
-Icu<br />
RAM [byte]<br />
Japan Automotive Software Platform and Architecture<br />
1600<br />
1400<br />
1200<br />
1000<br />
800<br />
600<br />
400<br />
200<br />
0<br />
45%<br />
reduction<br />
RAM [byte]<br />
33%<br />
reduction<br />
Vendors-A Vendors-B<br />
28%<br />
reduction<br />
27% reduction<br />
-Rte<br />
-Os<br />
-PduR<br />
-Com<br />
-SchM<br />
2500<br />
2000<br />
65% rise<br />
48% reduction<br />
34% reduction<br />
-FrTrcv<br />
-FrSM<br />
-FrIf<br />
-Fr<br />
-Gpt<br />
1500<br />
1000<br />
48%<br />
reduction<br />
-Mcu<br />
-Dio<br />
-Port<br />
500<br />
Rel. 3.0 Concept Reliability Rel. 3.0 Concept Reliability<br />
-Icu<br />
0<br />
Rel. 3.0 Concept Reliability Rel. 3.0 Concept Reliability<br />
JP Supplier A JP Supplier B JP Supplier A JP Supplier B<br />
Vendors-A Vendors-B Vendors-A Vendors-B<br />
3000<br />
-Rte<br />
-Os<br />
-PduR<br />
-Com<br />
-CanTrcv<br />
-CanSM<br />
-CanIf<br />
-Can<br />
-SchM<br />
-Gpt<br />
-Mcu<br />
-Dio<br />
-Port<br />
-Icu<br />
-Rte<br />
-Os<br />
-PduR<br />
-Com<br />
-SchM<br />
-FrTrcv<br />
-FrSM<br />
-FrIf<br />
-Fr<br />
-Gpt<br />
-Mcu<br />
-Dio<br />
-Port<br />
-Icu
<strong>Test</strong> Results-4 : <strong>Evaluation</strong> <strong>Test</strong>-2<br />
12.000<br />
10.000<br />
8.000<br />
6.000<br />
4.000<br />
2.000<br />
0.000<br />
CAN<br />
FlexRay<br />
25.00<br />
20.00<br />
15.00<br />
10.00<br />
5.00<br />
0.00<br />
Rel. 3.0<br />
Transmission Time [μs]<br />
1.5% rise<br />
Vendors-A Vendors-B<br />
Rte_Write~Com_SendSignal<br />
Com_SendSignal~<br />
27%<br />
reduction<br />
Transmission Time [μs] Reception Time [μs]<br />
4% reduction<br />
15% reduction<br />
Concept Reliability<br />
Vendors-A<br />
Rel. 3.0<br />
Rte_Write~ComSendSignal<br />
ComSendSignal~<br />
-Interrupt~DecoupledTransmission<br />
DecoupledTrasmission~<br />
28% reduction<br />
42%<br />
reduction<br />
Concept Reliability<br />
Vendors-B<br />
35.000<br />
30.000<br />
25.000<br />
20.000<br />
15.000<br />
10.000<br />
Japan Automotive Software Platform and Architecture<br />
5.000<br />
0.000<br />
40.00<br />
35.00<br />
30.00<br />
25.00<br />
20.00<br />
15.00<br />
10.00<br />
5.00<br />
0.00<br />
Rel. 3.0<br />
Reception Time [μs]<br />
52% reduction<br />
JP Supplier A JP Supplier B<br />
Vendors-A Vendors-B<br />
6% reduction<br />
43% reduction<br />
Concept Reliability<br />
Vendors-A<br />
Rel. 3.0<br />
JP Supplier A JP Supplier B<br />
Rte_Read~<br />
Com_Cbk~<br />
Rx_Interupt~Com_Cbk<br />
60% reduction<br />
Rte_Read<br />
ComCbk ~Rte_Read<br />
Receive &Indicate ~ ComCbk<br />
Interrupt ~ Receive &Indicate<br />
12% reduction<br />
28% reduction<br />
Concept Reliability<br />
Vendors-B
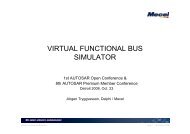
<strong>Evaluation</strong> <strong>Test</strong>-3 : Program Construction<br />
The evaluation application simulate a motor speed control.<br />
Command<br />
Transmission<br />
ECU<br />
ECU1<br />
AUTOSAR<br />
Software<br />
Parts<br />
: <strong>Evaluation</strong> Application<br />
Communication<br />
Processing<br />
OS<br />
: Interface/Specification Undefinition Part<br />
Current Control<br />
CAN Communication<br />
Application Layer<br />
Application/Middleware IF<br />
Communication<br />
Manager<br />
Communication<br />
Router<br />
Protocol IF<br />
Communication<br />
Driver<br />
Service<br />
Layer<br />
ECU Abstraction<br />
Layer<br />
PORT ADC<br />
Motor Control<br />
DIO<br />
Micro Controller Abstraction Layer<br />
Hardware<br />
FlexRay Bus<br />
Japan Automotive Software Platform and Architecture<br />
100μs<br />
Processing<br />
Motor Sensor Driver<br />
Hardware Dependence Module<br />
ECU2<br />
3-Phase AC Motor
<strong>Test</strong> Results-5 : <strong>Evaluation</strong> <strong>Test</strong>-3<br />
AUTOSAR BSW Rel. 3.0<br />
JASPAR BSW<br />
Legacy Software<br />
50 μs 100 μs<br />
0 20 40 60 80 100 120<br />
Time of current control part<br />
Japan Automotive Software Platform and Architecture<br />
Time [μs]
<strong>Test</strong> Results-6 : <strong>Evaluation</strong> <strong>Test</strong>-3<br />
AUTOSAR BSW Rel. 3.0<br />
プロファイル&クラスタ<br />
JASPAR BSW<br />
Legacy Software<br />
レガシー<br />
26% Reduction<br />
0 20 40 60 80 100 120<br />
Time [μs]<br />
FlexRay Communication Time<br />
Japan Automotive Software Platform and Architecture
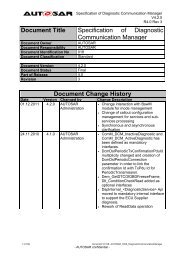
<strong>Test</strong> Results-7 : <strong>Evaluation</strong> <strong>Test</strong>-3<br />
ROM [byte]<br />
45,000<br />
40,000<br />
35,000<br />
30,000<br />
25,000<br />
20,000<br />
15,000<br />
10,000<br />
5,000<br />
0<br />
AUTOSAR<br />
BSW<br />
3% Reduction<br />
8% Reduction<br />
JASPAR<br />
BSW<br />
Legacy<br />
Software<br />
Resource Consumption (Left : ROM, Right : RAM)<br />
Japan Automotive Software Platform and Architecture<br />
4,500<br />
4,000<br />
3,500<br />
3,000<br />
2,500<br />
2,000<br />
1,500<br />
1,000<br />
500<br />
0<br />
RAM [byte]
JASPAR Concept Summary<br />
1. Reduction of ROM and RAM usage<br />
By using Profiling, and Clustering concepts, regardless of the kind of<br />
application the reduction of ROM and RAM usage can be accomplished<br />
(プロファイル、クラスターコンセプト共、ROM、RAMのリソースについては、アプリケーションに<br />
関わらず削減できる。)<br />
2. Reduction of the CPU load<br />
The effect of the reduction of the CPU load using Profiling concept depends on<br />
the application<br />
The effect of the reduction of the CPU load using Clustering concept doesn't<br />
depend on the application (because Clustering concept is adapted to the<br />
communication stack, the application-common stack)<br />
(プロファイルコンセプトは、アプリケーションにより効果に差異が見られる。<br />
クラスターコンセプトは、処理負荷を軽減できている。しかし、通信部分に適用されており、アプリ<br />
ケーションの違いによる差異が少ないからと考えられる。)<br />
3. Difference in Software vendors<br />
The BSW performance differs between software vendors. It is because the<br />
difference in the understanding of a specification, and the implementation skills.<br />
( ソフトウェアベンダーによる差異は確実に見られる。これは、各ベンダーの仕様の理解度の違い、<br />
得意技術分野の差によるものと考えられる。)<br />
Japan Automotive Software Platform and Architecture
<strong>Test</strong> & <strong>Evaluation</strong>
Selection of Application System<br />
> Developed results things by the project<br />
1. Basic software for embedded software for automotive<br />
2. Tool chain for embedded software for automotive<br />
3. Development process for embedded software for automotive<br />
> The above systems were applied to an automotive control system.<br />
> We considered application systems satisfied the bellow conditions.<br />
“Software size and communication capacity”<br />
“Request of hard real time”<br />
Software size and<br />
communication capacity<br />
Large �<br />
� Small<br />
ITS Control<br />
� Low Request of hard real time High �<br />
Japan Automotive Software Platform and Architecture<br />
Safety<br />
Control<br />
Steering<br />
Control
Application System-1 (ITS Control System)<br />
Software: Built an adaptive cruise control system software and a meter unit<br />
software using AUTOSAR Architecture<br />
Communication: Built a network using CAN protocol<br />
Brake Actuator<br />
ブレーキアクチュエータ<br />
Throttle Actuator<br />
スロットルアクチュエータ<br />
ミリ波レーダ<br />
Milli-wave radar<br />
メーター Meter<br />
ユニット Unit<br />
2009年型 レジェンド<br />
2009 mode Legend<br />
ACC<br />
ACC<br />
ユニット<br />
Unit<br />
ACC ACC<br />
ユニット Unit<br />
Japan Automotive Software Platform and Architecture<br />
メーター Meter<br />
ユニット Unit<br />
ACC作動状態表示<br />
Display ACC status<br />
エンジン Engine<br />
Control 制御ECU ECU<br />
スロットル<br />
Throttle Actuator<br />
アクチュエータ<br />
ブレーキ Brake<br />
Control 制御ECU ECU<br />
ブレーキ Brake<br />
アクチュエータ Actuator
Application System-2 (Safety Control System)<br />
Software: Built a Driving-Support software system using AUTOSAR Architecture<br />
Communication: Built a network using the next-generation fast-speed protocol,<br />
FlexRay<br />
Cruising<br />
SW<br />
Driving<br />
Support<br />
ECU<br />
Forward<br />
MIlli-wave<br />
radar<br />
Driver monitoring<br />
camera<br />
Japan Automotive Software Platform and Architecture<br />
Stereo<br />
camera<br />
Legacy Communication Protocol Next-Generation Protocol(FlexRay)<br />
<br />
Backward<br />
MIlli-wave<br />
radar
Application System-3 (Steering Control System)<br />
Software: Built a Steer-by-Wire software system using AUTOSAR Architecture<br />
Communication: Built a network using the next-generation fast-speed protocol,<br />
FlexRay<br />
Steering Motor<br />
Haptic Motor<br />
SBW system overview<br />
FlexRay communication<br />
Japan Automotive Software Platform and Architecture<br />
分散協調ECU
Conclusion
Conclusion<br />
Confirmed that AUTOSAR software is a highly versatile platform which<br />
improves the reusability of application software<br />
(AUTOSAR Softwareは、アプリケーションソフトウェアの入れ替えなど簡単に行え、高い汎用性を持つプラットフォームソフト<br />
ウェアであることを確認)<br />
Adapted JASPAR concept to AUTOSAR software, to achieve better<br />
performance while keeping the reusability<br />
(AUTOSAR Softwareの汎用性をできるだけ保ちつつ、効率性を高めるためJASPARコンセプトを適用)<br />
Confirmed the reduction of ROM/RAM usage and CPU load<br />
(Rom、Ramの削減、演算負荷の低減を確認)<br />
Confirmed that the performance of the AUTOSAR software can achieve<br />
the same performance as legacy application<br />
(実システムにAUTOSAR Softwareを適用し、従来のソフトウェアと同等性能が得られることを<br />
確認)<br />
Japan Automotive Software Platform and Architecture
Thank you for your attention