


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 1.<br />
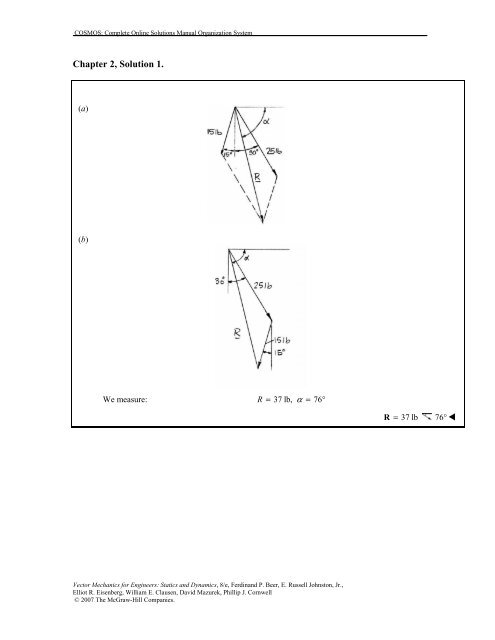
(a)<br />
(b)<br />
We measure:<br />
R = 37 lb, α = 76°<br />
R = 37 lb 76° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 2.<br />
(a)<br />
(b)<br />
We measure:<br />
R = 57 lb, α = 86°<br />
R = 57 lb 86° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 3.<br />
(a)<br />
Parallelogram law:<br />
(b)<br />
Triangle rule:<br />
We measure:<br />
R = 10.5 kN<br />
α = 22.5°<br />
R = 10.5 kN 22.5° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 4.<br />
(a)<br />
Parallelogram law:<br />
We measure:<br />
R = 5.4 kN α = 12°<br />
R = 5.4 kN 12° !<br />
(b)<br />
Triangle rule:<br />
We measure:<br />
R = 5.4 kN α = 12°<br />
R = 5.4 kN 12° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 5.<br />
(a)<br />
Using the triangle rule and the Law of Sines<br />
sin β sin 45°<br />
=<br />
150 N 200 N<br />
sin β = 0.53033<br />
β = 32.<strong>02</strong>8°<br />
α + β + 45° = 180°<br />
α = 103.0°!<br />
(b)<br />
Using the Law of Sines<br />
F bb ′<br />
=<br />
sinα<br />
200 N<br />
sin 45°<br />
F ′ = 276 N !<br />
bb<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 6.<br />
(a)<br />
Using the triangle rule and the Law of Sines<br />
sinα sin 45°<br />
=<br />
120 N 200 N<br />
sinα = 0.42426<br />
α = 25.104°<br />
or α = 25.1°!<br />
(b) β + 45° + 25.104° = 180°<br />
β = 109.896°<br />
Using the Law of Sines<br />
F aa ′ 200 N<br />
=<br />
sin β sin 45°<br />
F aa ′ 200 N<br />
=<br />
sin109.896° sin 45°<br />
or<br />
F ′ = 266 N !<br />
aa<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 7.<br />
Using the triangle rule and the Law of Cosines,<br />
Have: β = 180° − 45°<br />
Then:<br />
or<br />
β = 135°<br />
R<br />
2<br />
2 2<br />
( ) ( ) ( )( )<br />
= 900 + 600 − 2 900 600 cos 135°<br />
R = 1390.57 N<br />
Using the Law of Sines,<br />
600 1390.57<br />
sinγ = sin135°<br />
or γ = 17.7642°<br />
and α = 90° − 17.7642°<br />
α = 72.236°<br />
(a) α = 72.2°!<br />
(b)<br />
R = 1.391 kN !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 8.<br />
By trigonometry: Law of Sines<br />
F2 R 30<br />
= =<br />
sinα<br />
sin 38°<br />
sin β<br />
α = 90° − 28° = 62 ° , β = 180° − 62° − 38° = 80°<br />
Then:<br />
F2 R 30 lb<br />
= =<br />
sin 62° sin 38° sin80°<br />
or (a) F 2 = 26.9 lb !<br />
(b)<br />
R = 18.75 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 9.<br />
Using the Law of Sines<br />
F1 R 20 lb<br />
= =<br />
sinα<br />
sin 38°<br />
sin β<br />
α = 90° − 10° = 80 ° , β = 180° − 80° − 38° = 62°<br />
Then:<br />
F1 R 20 lb<br />
= =<br />
sin80° sin 38° sin 62°<br />
or (a) F 1 = 22.3 lb !<br />
(b)<br />
R = 13.95 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 10.<br />
Using the Law of Sines:<br />
60 N 80 N<br />
sinα = sin10°<br />
or α = 7.4832°<br />
β = 180° − ( 10° + 7.4832°<br />
)<br />
= 162.517°<br />
Then:<br />
R 80 N<br />
=<br />
sin162.517° sin10°<br />
or<br />
R = 138.405 N<br />
(a) α = 7.48°!<br />
(b)<br />
R = 138.4 N !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 11.<br />
Using the triangle rule and the Law of Sines<br />
Have: β = 180° − ( 35° + 25°<br />
)<br />
= 120°<br />
Then:<br />
P R 80 lb<br />
= =<br />
sin 35° sin120° sin 25°<br />
or (a)<br />
(b)<br />
P = 108.6 lb !<br />
R = 163.9 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 12.<br />
Using the triangle rule and the Law of Sines<br />
(a) Have:<br />
80 lb 70 lb<br />
sinα = sin 35°<br />
sinα = 0.65552<br />
α = 40.959°<br />
or α = 41.0°!<br />
(b) β = 180 − ( 35° + 40.959°<br />
)<br />
= 104.041°<br />
Then:<br />
R 70 lb<br />
=<br />
sin104.041° sin 35°<br />
or<br />
R = 118.4 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 13.<br />
We observe that force P is minimum when α = 90 ° .<br />
Then:<br />
(a) P = ( 80 lb)<br />
sin 35°<br />
And:<br />
(b) R = ( 80 lb)<br />
cos35°<br />
or<br />
P = 45.9 lb !<br />
or R = 65.5 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 14.<br />
For T BC to be a minimum,<br />
R and T BC must be perpendicular.<br />
Thus T BC = ( 70 N)<br />
sin 4°<br />
= 4.8829 N<br />
And R = ( 70 N)<br />
cos 4°<br />
= 69.829 N<br />
(a)<br />
(b)<br />
T = 4.88 N 6.00° !<br />
BC<br />
R = 69.8 N !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 15.<br />
Using the force triangle and the Laws of Cosines and Sines<br />
We have:<br />
γ = 180° − ( 15° + 30°<br />
)<br />
= 135°<br />
2<br />
2 2<br />
Then: ( ) ( ) ( )( )<br />
R = 15 lb + 25 lb − 2 15 lb 25 lb cos135°<br />
or<br />
2<br />
= 1380.33 lb<br />
R = 37.153 lb<br />
and<br />
25 lb 37.153 lb<br />
sin β = sin135°<br />
⎛ 25 lb ⎞<br />
sin β = ⎜ sin135°<br />
37.153 lb<br />
⎟<br />
⎝ ⎠<br />
= 0.47581<br />
β = 28.412°<br />
Then: α + β + 75° = 180°<br />
α = 76.588°<br />
R = 37.2 lb 76.6° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 16.<br />
Using the Law of Cosines and the Law of Sines,<br />
( ) ( ) ( )( )<br />
2 2 2<br />
R = 45 lb + 15 lb − 2 45 lb 15 lb cos135°<br />
or<br />
R = 56.609 lb<br />
56.609 lb 15 lb<br />
=<br />
sin135°<br />
sinθ<br />
or θ = 10.7991°<br />
R = 56.6 lb 85.8° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 17.<br />
γ = 180° − 25° − 50°<br />
γ = 105°<br />
Using the Law of Cosines:<br />
or<br />
2<br />
2 2<br />
( ) ( ) ( )( )<br />
R = 5 kN + 8 kN − 2 5 kN 8 kN cos105°<br />
R = 10.4740 kN<br />
Using the Law of Sines:<br />
10.4740 kN 8 kN<br />
=<br />
sin105°<br />
sin β<br />
or β = 47.542°<br />
and α = 47.542°− 25°<br />
α = 22.542°<br />
R = 10.47 kN 22.5° "<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 19.<br />
Using the force triangle and the Laws of Cosines and Sines<br />
We have: γ = 180° − ( 45° + 25° ) = 110°<br />
2<br />
2 2<br />
Then: ( ) ( ) ( )( )<br />
and<br />
R = 30 kN + 20 kN − 2 30 kN 20 kN cos110°<br />
2<br />
= 1710.42 kN<br />
R = 41.357 kN<br />
20 kN 41.357 kN<br />
sinα = sin110°<br />
⎛ 20 kN ⎞<br />
sinα<br />
= ⎜<br />
sin110°<br />
41.357 kN<br />
⎟<br />
⎝ ⎠<br />
= 0.45443<br />
α = 27.<strong>02</strong>8°<br />
Hence: φ = α + 45° = 72.<strong>02</strong>8°<br />
R = 41.4 kN 72.0° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 19.<br />
Using the force triangle and the Laws of Cosines and Sines<br />
We have: γ = 180° − ( 45° + 25° ) = 110°<br />
2<br />
2 2<br />
Then: ( ) ( ) ( )( )<br />
and<br />
R = 30 kN + 20 kN − 2 30 kN 20 kN cos110°<br />
2<br />
= 1710.42 kN<br />
R = 41.357 kN<br />
20 kN 41.357 kN<br />
sinα = sin110°<br />
⎛ 20 kN ⎞<br />
sinα<br />
= ⎜<br />
sin110°<br />
41.357 kN<br />
⎟<br />
⎝ ⎠<br />
= 0.45443<br />
α = 27.<strong>02</strong>8°<br />
Hence: φ = α + 45° = 72.<strong>02</strong>8°<br />
R = 41.4 kN 72.0° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 20.<br />
Using the force triangle and the Laws of Cosines and Sines<br />
We have: γ = 180° − ( 45° + 25° ) = 110°<br />
2<br />
2 2<br />
Then: ( ) ( ) ( )( )<br />
and<br />
R = 30 kN + 20 kN − 2 30 kN 20 kN cos110°<br />
2<br />
= 1710.42 kN<br />
R = 41.357 kN<br />
30 kN 41.357 kN<br />
sinα = sin110°<br />
⎛ 30 kN ⎞<br />
sinα<br />
= ⎜<br />
sin110°<br />
41.357 kN<br />
⎟<br />
⎝ ⎠<br />
= 0.68164<br />
α = 42.972°<br />
Finally: φ = α + 45° = 87.972°<br />
R = 41.4 kN 88.0° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 21.<br />
F = 2.4 kN cos50°<br />
2.4 kN Force: ( )<br />
x<br />
F = 1.85 kN cos 20°<br />
1.85 kN Force: ( )<br />
x<br />
( )<br />
F = 2.4 kN sin 50°<br />
y<br />
( )<br />
F = 1.85 kN sin 20°<br />
y<br />
F x = 1.543 kN ⊳<br />
F = 1.839 kN ⊳<br />
y<br />
F x = 1.738 kN ⊳<br />
F = 1.40 kN cos35°<br />
1.40 kN Force: ( )<br />
x<br />
( )<br />
F =− 1.40 kN sin 35°<br />
y<br />
F = 0.633 kN ⊳<br />
y<br />
F x = 1.147 kN ⊳<br />
F =−0.803 kN ⊳<br />
y<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 22.<br />
F = 5kips cos40°<br />
5 kips: ( )<br />
x<br />
or<br />
F x = 3.83 kips ⊳<br />
( )<br />
F = 5kips sin40°<br />
y<br />
or F = 3.21 kips ⊳<br />
y<br />
F =− 7kips cos70°<br />
7 kips: ( )<br />
x<br />
or F =−2.39 kips ⊳<br />
x<br />
( )<br />
F = 7 kips sin 70°<br />
y<br />
or F = 6.58 kips ⊳<br />
y<br />
F =− 9kips cos20°<br />
9 kips: ( )<br />
x<br />
( )<br />
F = 9 kips sin 20°<br />
y<br />
or F =−8.46 kips ⊳<br />
x<br />
or F = 3.08 kips ⊳<br />
y<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 23.<br />
Determine the following distances:<br />
680 N Force:<br />
d<br />
d<br />
d<br />
OA<br />
OB<br />
OC<br />
F x<br />
( ) ( )<br />
2 2<br />
= − 160 mm + 300 mm = 340 mm<br />
( ) ( )<br />
2 2<br />
= 600 mm + 250 mm = 650 mm<br />
( ) ( )<br />
2 2<br />
= 600 mm + − 110 mm = 610 mm<br />
( −160 mm)<br />
= 680 N 340 mm<br />
390 N Force:<br />
F y =<br />
F x =<br />
F y =<br />
( 300 mm)<br />
680 N 340 mm<br />
( 600 mm)<br />
390 N 650 mm<br />
( 250 mm)<br />
390 N 650 mm<br />
F =− 320 N !<br />
x<br />
F = 600 N !<br />
y<br />
F = 360 N !<br />
x<br />
610 N Force:<br />
F x =<br />
( 600 mm)<br />
610 N 610 mm<br />
F = 150 N !<br />
y<br />
F y<br />
( −110 mm)<br />
= 610 N 610 mm<br />
F = 600 N !<br />
x<br />
F =− 110 N !<br />
y<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 24.<br />
We compute the following distances:<br />
Then:<br />
204 lb Force:<br />
212 lb Force:<br />
( ) ( )<br />
2 2<br />
OA = 48 + 90 = 1<strong>02</strong> in.<br />
( ) ( )<br />
2 2<br />
OB = 56 + 90 = 106 in.<br />
( ) ( )<br />
2 2<br />
OC = 80 + 60 = 100 in.<br />
( ) 48<br />
F x =− 204 lb ,<br />
F x =−96.0 lb ⊳<br />
1<strong>02</strong><br />
( ) 90<br />
F y =+ 204 lb ,<br />
F y = 180.0 lb ⊳<br />
1<strong>02</strong><br />
( ) 56<br />
F x =+ 212 lb ,<br />
F x = 112.0 lb ⊳<br />
106<br />
400 lb Force:<br />
( ) 90<br />
F y =+ 212 lb ,<br />
F y = 180.0 lb ⊳<br />
106<br />
( ) 80<br />
F x =− 400 lb ,<br />
F x =−320 lb ⊳<br />
100<br />
( ) 60<br />
F y =− 400 lb ,<br />
F y =−240 lb ⊳<br />
100<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 25.<br />
(a)<br />
P =<br />
=<br />
P y<br />
sin 35<br />
°<br />
960 N<br />
sin 35°<br />
or<br />
P = 1674 N ⊳<br />
(b)<br />
P =<br />
x<br />
=<br />
P<br />
y<br />
tan35°<br />
960 N<br />
tan 35°<br />
or<br />
P x = 1371 N ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 26.<br />
(a)<br />
P =<br />
P =<br />
P x<br />
cos 40<br />
°<br />
30 lb<br />
cos 40°<br />
or<br />
P = 39.2 lb !<br />
(b) P = P tan 40°<br />
y<br />
x<br />
( )<br />
P = 30 lb tan 40°<br />
y<br />
or P = 25.2 lb !<br />
y<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 27.<br />
(a)<br />
P = 100 N<br />
y<br />
P =<br />
P y<br />
sin 75<br />
°<br />
100 N<br />
P =<br />
sin 75°<br />
or<br />
P = 103.5 N "<br />
(b)<br />
P =<br />
x<br />
P<br />
y<br />
tan 75°<br />
P x =<br />
100 N<br />
tan 75°<br />
or P = 26.8 N "<br />
x<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 28.<br />
We note:<br />
CB exerts force P on B along CB, and the horizontal component of P is<br />
Then:<br />
(a) P = Psin 50°<br />
x<br />
P x =<br />
260 lb.<br />
P =<br />
=<br />
P x<br />
sin50<br />
°<br />
260 lb<br />
sin50°<br />
(b) P = P tan 50°<br />
x<br />
= 339.40 lb<br />
P = 339 lb !<br />
y<br />
P =<br />
y<br />
=<br />
Px<br />
tan 50°<br />
260 lb<br />
tan 50°<br />
= 218.16 lb<br />
P 218 lb !<br />
y =<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 29.<br />
(a)<br />
P =<br />
45 N<br />
cos 20°<br />
or<br />
P = 47.9 N !<br />
(b) ( )<br />
P = 47.9 N sin 20°<br />
x<br />
or P = 16.38 N !<br />
x<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 30.<br />
(a)<br />
18 N<br />
P =<br />
sin 20°<br />
or<br />
P = 52.6 N !<br />
(b)<br />
P y =<br />
18 N<br />
tan 20°<br />
or P = 49.5 N !<br />
y<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 31.<br />
From the solution to Problem 2.21:<br />
F2.4 = ( 1.543 kN) i + ( 1.839 kN)<br />
j<br />
( ) ( )<br />
F1.85 = 1.738 kN i + 0.633 kN j<br />
( ) ( )<br />
F1.40 = 1.147 kN i − 0.803 kN j<br />
( 4.428 kN) ( 1.669 kN)<br />
R =Σ F = i + j<br />
( 4.428 kN) ( 1.669 kN)<br />
R = +<br />
= 4.7321 kN<br />
1.669 kN<br />
tanα =<br />
4.428 kN<br />
α = 20.652°<br />
2 2<br />
R = 4.73 kN 20.6° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 32.<br />
From the solution to Problem 2.22:<br />
( ) ( )<br />
F5 = 3.83 kips i + 3.21 kips j<br />
( ) ( )<br />
F7 =− 2.39 kips i + 6.58 kips j<br />
( ) ( )<br />
F9 =− 8.46 kips i + 3.08 kips j<br />
( 7.<strong>02</strong> kips) ( 12.87)<br />
R =Σ F =− i + j<br />
( ) ( )<br />
2 2<br />
R = − 7.<strong>02</strong> kips + 12.87 kips = 14.66 kips<br />
−1 12.87<br />
α = tan ⎛<br />
⎜<br />
⎞<br />
⎟ = 61.4°<br />
⎝−7.<strong>02</strong><br />
⎠<br />
R = 14.66 kips 61.4° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 33.<br />
From the solution to Problem 2.24:<br />
( 48.0 lb) ( 90.0 lb)<br />
F OA =− i + j<br />
( 112.0 lb) ( 180.0 lb)<br />
F OB = i + j<br />
OC =−<br />
( 320 lb) − ( 240 lb)<br />
F i j<br />
( 256lb) ( 30lb)<br />
R =Σ F =− i + j<br />
( 256lb) ( 30lb)<br />
R = − +<br />
= 257.75 lb<br />
2 2<br />
tan<br />
30 lb<br />
256 lb<br />
α = −<br />
α =− 6.6839°<br />
R = 258 lb 6.68° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 34.<br />
From Problem 2.23:<br />
( 320 N) ( 600 N)<br />
F OA =− i + j<br />
( 360 N) ( 150 N)<br />
F OB = i + j<br />
OC =<br />
( 600N) − ( 110N)<br />
F i j<br />
( 640 N) ( 640 N)<br />
R =Σ F = i + j<br />
( 640 N) ( 640 N)<br />
R = +<br />
= 905.097 N<br />
2 2<br />
tanα =<br />
640 N<br />
640 N<br />
α = 45.0°<br />
R = 905 N 45.0° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 35.<br />
Cable BC Force:<br />
100-lb Force:<br />
156-lb Force:<br />
and<br />
Further:<br />
Thus:<br />
( ) 84<br />
F x =− 145 lb =− 105 lb<br />
116<br />
( ) 80<br />
F y = 145 lb = 100 lb<br />
116<br />
( ) 3<br />
F x =− 100 lb =− 60 lb<br />
5<br />
( ) 4<br />
F y =− 100 lb =− 80 lb<br />
5<br />
( ) 12<br />
F x = 156 lb = 144 lb<br />
13<br />
( ) 5<br />
F y =− 156 lb =− 60 lb<br />
13<br />
R =Σ F =− 21 lb, R =Σ F =− 40 lb<br />
x x y y<br />
( ) ( )<br />
2 2<br />
R = − 21 lb + − 40 lb = 45.177 lb<br />
tanα =<br />
40<br />
21<br />
−1 40<br />
α = tan = 62.3°<br />
21<br />
R = 45.2 lb 62.3° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 36.<br />
(a) Since R is to be horizontal, R y = 0<br />
Then, R =Σ F = 0<br />
y<br />
y<br />
( ) α ( )<br />
( 13) cosα<br />
= ( 7)<br />
sinα<br />
+ 9<br />
90 lb + 70 lb sin − 130 lb cosα<br />
= 0<br />
2<br />
( )<br />
13 1 − sin α = 7 sinα<br />
+ 9<br />
2 2<br />
Squaring both sides: ( ) ( ) ( )<br />
169 1 − sin α = 49 sin α + 126 sinα<br />
+ 81<br />
2<br />
( ) α ( )<br />
218 sin + 126 sinα<br />
− 88 = 0<br />
<strong>Sol</strong>ving by quadratic formula: sinα = 0.40899<br />
or α = 24.1°!<br />
(b)<br />
Since R is horizontal, R = R x<br />
Then, R = Rx = ΣFx<br />
F x<br />
( ) ( )<br />
Σ = 70 cos 24.142° + 130 sin 24.142°<br />
or<br />
R = 117.0 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 37.<br />
300-N Force:<br />
400-N Force:<br />
600-N Force:<br />
and<br />
( )<br />
F = 300 N cos 20° = 281.91 N<br />
x<br />
( )<br />
F = 300 N sin 20° = 1<strong>02</strong>.61 N<br />
y<br />
( )<br />
F = 400 N cos85° = 34.862 N<br />
x<br />
( )<br />
F = 400 N sin85° = 398.48 N<br />
y<br />
( )<br />
F = 600 N cos5° = 597.72 N<br />
x<br />
( )<br />
F =− 600 N sin 5°=−<br />
52.293 N<br />
y<br />
R<br />
R<br />
x<br />
y<br />
=Σ F = 914.49 N<br />
x<br />
=Σ F = 448.80 N<br />
y<br />
( ) ( )<br />
2 2<br />
R = 914.49 N + 448.80 N = 1018.68 N<br />
Further:<br />
tanα =<br />
448.80<br />
914.49<br />
−1 448.80<br />
α = tan = 26.1°<br />
914.49<br />
R = 1019 N 26.1° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 38.<br />
Σ F x :<br />
R<br />
x<br />
=Σ F<br />
x<br />
( ) ( ) ( )<br />
R = 600 N cos50° + 300 N cos85° − 700 N cos50°<br />
x<br />
R =− 38.132 N<br />
x<br />
Σ F y :<br />
R<br />
y<br />
=Σ F<br />
y<br />
( ) ( ) ( )<br />
R = 600 N sin 50°+ 300 N sin85° + 700 N sin50°<br />
y<br />
R y =<br />
1294.72 N<br />
( 38.132 N) ( 1294.72 N)<br />
R = − +<br />
R = 1295 N<br />
1294.72 N<br />
tanα =<br />
38.132 N<br />
α = 88.3°<br />
2 2<br />
R = 1.295 kN 88.3° !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 39.<br />
We have:<br />
84 12 3<br />
Rx =Σ Fx =− TBC<br />
+ −<br />
116 13 5<br />
or R =− 0.72414T<br />
+ 84 lb<br />
and<br />
x<br />
BC<br />
( 156 lb) ( 100 lb)<br />
80 5 4<br />
Ry =Σ Fy = TBC<br />
− −<br />
116 13 5<br />
( 156 lb) ( 100 lb)<br />
R<br />
y<br />
= 0.68966T<br />
− 140 lb<br />
BC<br />
(a)<br />
So, for R to be vertical,<br />
R<br />
x<br />
=− 0.72414T<br />
+ 84 lb = 0<br />
BC<br />
T = 116.0 lb !<br />
BC<br />
(b) Using<br />
T BC =<br />
116.0 lb<br />
( )<br />
R = R y = 0.68966 116.0 lb − 140 lb = − 60 lb<br />
R = R = 60.0 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 40.<br />
(a) Since R is to be vertical, R x = 0<br />
Then, R =Σ F = 0<br />
x<br />
x<br />
( ) ( ) ( ) ( )<br />
600 N cosα + 300 N cos α + 35° − 700 N cosα<br />
= 0<br />
Expanding: ( )<br />
3 cosαcos35°− sinαsin 35° − cosα<br />
= 0<br />
Then:<br />
tanα<br />
=<br />
⎛1<br />
⎞<br />
cos35°− ⎜ ⎟<br />
⎝3<br />
⎠<br />
sin 35°<br />
α = 40.265°<br />
α = 40.3°!<br />
(b) Since R is vertical, R = Ry<br />
Then: R = Ry = Σ Fy<br />
R = ( 600 N) sin 40.265° + ( 300 N) sin 75.265° + ( 700 N)<br />
sin 40.265°<br />
R = 1130 N<br />
R = 1.130 kN !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 41.<br />
Selecting the x axis along aa′ , we write<br />
(a) Setting R y = 0 in Equation (2):<br />
( ) ( )<br />
R =Σ F = 300 N + 400 N cosα + 600 N sinα<br />
(1)<br />
x<br />
x<br />
( ) ( )<br />
R =Σ F = 400 N sinα − 600 N cosα<br />
(2)<br />
y<br />
y<br />
Thus<br />
600<br />
tanα = = 1.5<br />
400<br />
α = 56.3°!<br />
(b) Substituting for α in Equation (1):<br />
( ) ( )<br />
R = 300 N + 400 N cos56.3° + 600 N sin 56.3°<br />
x<br />
R x =<br />
1<strong>02</strong>1.11 N<br />
R = R x = 1<strong>02</strong>1 N !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 42.<br />
(a) Require R =Σ F = 0:<br />
y<br />
y<br />
( ) ( )<br />
900 lb cos 25°+ 1200 lb sin 35°− sin 65°=<br />
0<br />
or<br />
T = 1659.45 lb<br />
AE<br />
T AE<br />
T = 1659 lb !<br />
AE<br />
(b)<br />
R =Σ F<br />
x<br />
R =− ( 900 lb) sin 25°− ( 1200 lb) cos35°− ( 1659.45 lb)<br />
cos65°<br />
R = 2060 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 43.<br />
Free-Body Diagram<br />
Force Triangle<br />
Law of Sines:<br />
FAC<br />
TBC<br />
400 lb<br />
= =<br />
sin 25° sin 60° sin 95°<br />
(a)<br />
400 lb<br />
F AC = sin 25 ° = 169.691 lb<br />
sin 95°<br />
F = 169.7 lb !<br />
AC<br />
(b)<br />
400<br />
T BC = sin 60 ° = 347.73 lb<br />
sin 95°<br />
T = 348 lb !<br />
BC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 44.<br />
Free-Body Diagram:<br />
Σ F x =<br />
0:<br />
4 21<br />
− TCA<br />
+ TCB<br />
= 0<br />
5 29<br />
or<br />
T<br />
CB<br />
⎛29 ⎞⎛4<br />
⎞<br />
= ⎜ T<br />
21 ⎟⎜<br />
5 ⎟<br />
⎝ ⎠⎝ ⎠<br />
CA<br />
3 20<br />
Σ F y = 0: TCA<br />
+ TCB<br />
− ( 3 kN)<br />
= 0<br />
5 29<br />
3 20⎛29 4 ⎞<br />
CA + CA 3 kN 0<br />
5 29<br />
⎜ × − =<br />
21 5<br />
⎟<br />
⎝ ⎠<br />
Then T<br />
T ( )<br />
or<br />
T CA =<br />
2.2<strong>02</strong>8 kN<br />
(a)<br />
(b)<br />
T = 2.20 kN !<br />
CA<br />
T = 2.43 kN !<br />
CB<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 45.<br />
Free-Body Diagram:<br />
Σ = 0: − F sin50° + F sin 70° = 0<br />
F y<br />
B<br />
C<br />
F<br />
C<br />
sin 50°<br />
=<br />
sin 70°<br />
( F )<br />
B<br />
Σ = 0: − F cos50° − F cos70° + 940 N = 0<br />
F x<br />
B<br />
C<br />
sin 50<br />
FB<br />
⎢<br />
⎡ cos50°+ cos70° ⎛<br />
⎜<br />
° ⎞<br />
⎟⎥<br />
⎤ = 940<br />
⎣<br />
⎝sin 70°<br />
⎠⎦<br />
F B =<br />
1019.96 N<br />
F C<br />
sin 50°<br />
=<br />
sin 70°<br />
( 1019.96 N )<br />
or<br />
F = 831 N !<br />
C<br />
F = 1<strong>02</strong>0 N !<br />
B<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 46.<br />
Free-Body Diagram:<br />
Σ = 0: − T cos25° − T cos 40° + ( 70 lb)<br />
cos10° = 0<br />
(1)<br />
F x<br />
AB<br />
AC<br />
Σ = 0: T sin 25°− T sin 40°+ ( 70 lb)<br />
sin10°= 0<br />
(2)<br />
F y<br />
AB<br />
<strong>Sol</strong>ving Equations (1) and (2) simultaneously:<br />
AC<br />
(a) T = 38.6 lb !<br />
AB<br />
(b) T = 44.3 lb !<br />
AC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 47.<br />
Free-Body Diagram:<br />
(a) Σ F x = 0: − TAB<br />
cos30° + Rcos65° = 0<br />
cos30<br />
R =<br />
° T AB<br />
cos65°<br />
Σ = 0: − T sin 30° + Rsin 65° − ( 550 N)<br />
= 0<br />
F y<br />
AB<br />
T AB<br />
⎛ cos30°<br />
⎞<br />
⎜− sin 30° + sin 65° − 550 = 0<br />
cos65°<br />
⎟<br />
⎝<br />
⎠<br />
or<br />
T = 405 N !<br />
AB<br />
cos30°<br />
cos65°<br />
(b) R = ( 450 N )<br />
or<br />
R = 830 N !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 48.<br />
Free-Body Diagram At B:<br />
12 17<br />
Σ Fx = 0: − TBA + TBC<br />
= 0<br />
13 293<br />
or T = 1.07591 T<br />
BA<br />
BC<br />
Σ F y =<br />
T<br />
T<br />
T<br />
0:<br />
BC<br />
BC<br />
BC<br />
or<br />
5 2<br />
TBA<br />
+ TBC<br />
− 300 N = 0<br />
13 293<br />
⎛ 5 ⎞ 293<br />
= ⎜300<br />
− TBA<br />
⎟<br />
⎝ 13 ⎠ 2<br />
= 2567.6 − 3.2918T<br />
BA<br />
( T )<br />
= 2567.6 − 3.2918 1.07591<br />
T BC =<br />
565.34 N<br />
BC<br />
Free-Body Diagram At C:<br />
17 24<br />
Σ F x = 0: − T 0<br />
293<br />
BC + T<br />
25<br />
CD =<br />
T CD<br />
17 ⎛25<br />
⎞<br />
= ( 565.34 N)<br />
⎜ 293<br />
24<br />
⎟<br />
⎝ ⎠<br />
T CD =<br />
584.86 N<br />
2 7<br />
Σ F y = 0: − T 0<br />
293<br />
BC + T<br />
25<br />
CD − W C =<br />
2 7<br />
W C =− +<br />
293<br />
25<br />
( 565.34 N) ( 584.86 N)<br />
or<br />
W = 97.7 N !<br />
C<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 49.<br />
Free-Body Diagram:<br />
Σ F x =<br />
0:<br />
−8 kips + 15 kips − T D cos 40° = 0<br />
T D =<br />
9.1378 kips<br />
Σ = 0: ( 9.1378 kips)<br />
sin 40°− = 0<br />
F y<br />
T C<br />
T = 9.14 kips !<br />
D<br />
T = 5.87 kips !<br />
C<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 50.<br />
Free-Body Diagram:<br />
Σ F y =<br />
0:<br />
− 9 kips + TD<br />
sin 40° = 0<br />
T = 14.0015 kips<br />
D<br />
T = 14.00 kips ⊳<br />
D<br />
( )<br />
Σ F x =<br />
−6 kips + − 14.0015 kips cos 40° = 0<br />
T B<br />
0:<br />
T = 16.73 kips<br />
B<br />
T = 16.73 kips ⊳<br />
B<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 51.<br />
Free-Body Diagram:<br />
Σ = 0: F + ( 2.3 kN) sin15° − ( 2.1 kN)<br />
cos15° = 0<br />
F x<br />
C<br />
Σ = 0: F − ( 2.3 kN) cos15° + ( 2.1 kN)<br />
sin15° = 0<br />
F y<br />
D<br />
or<br />
or<br />
F = 1.433 kN ⊳<br />
C<br />
F = 1.678 kN ⊳<br />
D<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 52.<br />
Free-Body Diagram:<br />
Σ = 0: − F B cos15° + 2.4 kN + ( 1.9kN)<br />
sin15° = 0<br />
F x<br />
or<br />
F B =<br />
2.9938 kN<br />
Σ = 0: F − ( 1.9 kN) cos15° + ( 2.9938 kN)<br />
sin15° = 0<br />
F y<br />
D<br />
F = 2.99 kN ⊳<br />
B<br />
F = 1.060 kN ⊳<br />
D<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 53.<br />
From Similar Triangles we have:<br />
L<br />
2<br />
( 2.5 m) ( 8 L) ( 5.45 m)<br />
2 2 2<br />
− = − −<br />
− 6.25 = 64 −16 L − 29.7<strong>02</strong>5<br />
or<br />
L = 2.5342 m<br />
And<br />
5.45 m<br />
cos β =<br />
8 m − 2.5342 m<br />
or β = 4.3576°<br />
Then<br />
cosα =<br />
2.5 m<br />
2.5342 m<br />
or α = 9.4237°<br />
Free-Body Diagram At B:<br />
Σ F x =<br />
0:<br />
or<br />
( )<br />
−T<br />
cosα − 35 N cosα + T cos β = 0<br />
T ABC<br />
ABC<br />
( )<br />
ABC<br />
35 cos9.4237°<br />
=<br />
cos4.3576°− cos9.4237°<br />
T ABC =<br />
3255.9 N<br />
Σ F y =<br />
0:<br />
( )<br />
T sinα + 35 N sinα + T sin β − W = 0<br />
ABC<br />
ABC<br />
( ) ( )<br />
sin 9.4237° 3255.9 N + 35 N + 3255.9 N sin 4.3576° − W = 0<br />
or W = 786.22 N<br />
(a)<br />
(b)<br />
W = 786 N "<br />
T = 3.26 kN "<br />
ABC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 54.<br />
From Similar Triangles we have:<br />
L<br />
2<br />
( 3 m) ( 8 L) ( 4.95 m)<br />
2 2 2<br />
− = − −<br />
− 9 = 64 −16 L − 24.5<strong>02</strong>5<br />
or<br />
L = 3.0311 m<br />
Then<br />
4.95 m<br />
cos β =<br />
8 m − 3.0311 m<br />
or β = 4.9989°<br />
And<br />
3m<br />
cosα =<br />
3.0311 m<br />
or α = 8.2147°<br />
Free-Body Diagram At B:<br />
(a) Σ F x = 0:<br />
−T cosα − T cosα + T cos β = 0<br />
or<br />
ABC DE ABC<br />
T<br />
DE<br />
cos β − cosα<br />
=<br />
T<br />
cosα<br />
Σ F y =<br />
0:<br />
ABC<br />
( )<br />
T sinα + T sinα + T sin β − 720 N = 0<br />
ABC DE ABC<br />
Substituting for α and β gives<br />
T ABC<br />
T ABC<br />
⎡<br />
⎛cos<br />
β − cosα<br />
⎞ ⎤<br />
⎢sinα + sinα⎜<br />
⎟ + sin β⎥=<br />
720<br />
⎣<br />
⎝ cosα<br />
⎠ ⎦<br />
T ABC<br />
=<br />
( 720)<br />
cos<br />
sin ( α + β )<br />
( 720)<br />
cos8.2147°<br />
( °+ ° )<br />
=<br />
sin 8.2147 4.9989<br />
α<br />
T ABC =<br />
3117.5 N<br />
or<br />
T = 3.12 kN "<br />
ABC<br />
cos 4.9989°− cos8.2147°<br />
3117.5 N<br />
cos8.2147°<br />
(b) =<br />
( )<br />
T DE<br />
T DE =<br />
20.338 N<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.<br />
or<br />
T = 20.3 N "<br />
DE
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 55.<br />
Free-Body Diagram At C:<br />
3 15 15<br />
Σ F x = 0: − TAC<br />
+ TBC<br />
− ( 150 lb ) = 0<br />
5 17 17<br />
or<br />
17<br />
− TAC + 5TBC<br />
= 750<br />
(1)<br />
5<br />
4 8 8<br />
Σ F y = 0: TAC<br />
+ TBC<br />
− ( 150 lb ) − 190 lb = 0<br />
5 17 17<br />
or<br />
17<br />
T<br />
5<br />
+ 2T<br />
= 1107.5<br />
(2)<br />
AC BC<br />
Then adding Equations (1) and (2)<br />
7T BC = 1857.5<br />
or<br />
T BC =<br />
265.36 lb<br />
Therefore (a) T AC = 169.6 lb !<br />
(b)<br />
T = 265 lb !<br />
BC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 56.<br />
Free-Body Diagram At C:<br />
3 15 15<br />
Σ F x = 0: − TAC<br />
+ TBC<br />
− ( 150 lb ) = 0<br />
5 17 17<br />
or<br />
17<br />
− TAC 5<br />
+ 5TBC<br />
= 750<br />
(1)<br />
4 8 8<br />
Σ F y = 0: TAC<br />
+ TBC<br />
− ( 150 lb ) − W = 0<br />
5 17 17<br />
or<br />
17 17<br />
TAC<br />
+ 2TBC<br />
= 300 + W<br />
5 4<br />
(2)<br />
Adding Equations (1) and (2) gives<br />
17<br />
7TBC<br />
= 1050 + W<br />
4<br />
or<br />
17<br />
TBC<br />
= 150 + W<br />
28<br />
Using Equation (1)<br />
17 ⎛ 17 ⎞<br />
− TAC<br />
+ 5 150 W 750<br />
5<br />
⎜ + =<br />
28<br />
⎟<br />
⎝ ⎠<br />
or<br />
25<br />
TAC<br />
= W<br />
28<br />
Now for T ≤ 240 lb ⇒<br />
25<br />
TAC<br />
:240=<br />
W<br />
28<br />
or<br />
W = 269 lb<br />
17<br />
TBC<br />
: 240 = 150 + W<br />
28<br />
or<br />
W = 148.2 lb<br />
Therefore 0 ≤ W ≤ 148.2 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 57.<br />
Free-Body Diagram At A:<br />
First note from geometry:<br />
The sides of the triangle with hypotenuse AD are in the ratio 12:35:37.<br />
The sides of the triangle with hypotenuse AC are in the ratio 3:4:5.<br />
The sides of the triangle with hypotenuse AB are also in the ratio<br />
12:35:37.<br />
Then:<br />
or<br />
and<br />
Then:<br />
or<br />
4 35 12<br />
Σ Fx<br />
= 0: − ( 3W) + ( W)<br />
+ Fs<br />
= 0<br />
5 37 37<br />
Fs<br />
= 4.4833W<br />
3 12 35<br />
Σ Fy<br />
= 0: ( 3W) + ( W)<br />
+ Fs<br />
− 400 N = 0<br />
5 37 37<br />
3 ( 3W) + 12 ( W) + 35 ( 4.4833W)<br />
− 400 N = 0<br />
5 37 37<br />
W = 62.841 N<br />
and<br />
or<br />
(a)<br />
(b) Have spring force<br />
Where<br />
and<br />
F s =<br />
281.74 N<br />
( )<br />
F = k L − L<br />
s AB O<br />
( )<br />
F = k L − L<br />
AB AB AB O<br />
W = 62.8 N ⊳<br />
( ) ( )<br />
2 2<br />
L = 0.360 m + 1.050 m = 1.110 m<br />
AB<br />
So:<br />
L = 758 mm ⊳<br />
O<br />
( )<br />
281.74 N = 800 N/m 1.110 − m<br />
L O<br />
or<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 58.<br />
Free-Body Diagram At A:<br />
First Note ...<br />
2 2<br />
With L = ( 22 in. ) + ( 16.5 in. )<br />
AB<br />
L AB =<br />
AD<br />
L AD =<br />
F = k L − L<br />
Then AB AB ( AB O )<br />
(a) F x 0:<br />
27.5 in.<br />
( 30 in. ) ( 16 in. )<br />
L = +<br />
34 in.<br />
2 2<br />
= ( 9 lb/in. )( 27.5 in. − 22.5 in. )<br />
= 45 lb<br />
= ( − )<br />
= ( 3 lb/in. )( 34 in. − 22.5 in. )<br />
F k L L<br />
AD AD AD O<br />
= 34.5 lb<br />
4 7 15<br />
− 45 lb + T AC + 34.5lb = 0<br />
5 25 17<br />
or T = 19.8529 lb<br />
Σ = ( ) ( )<br />
(b) F y 0:<br />
Σ = ( ) ( ) ( )<br />
AC<br />
3 24 8<br />
45 lb + 19.8529 lb + 34.5 lb − W = 0<br />
5 25 17<br />
T = 19.85 lb !<br />
AC<br />
W = 62.3 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 59.<br />
(a) For T AB to be a minimum<br />
TAB<br />
must be perpendicular to<br />
∴ α + 10° = 60°<br />
TAC<br />
T = 70 lb sin 30°<br />
(b) Then ( )<br />
AB<br />
or α = 50.0° <br />
or<br />
T = 35.0 lb <br />
AB<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 60.<br />
Note: In problems of this type, P may be directed along one of the cables, with T = Tmax<br />
in that cable and<br />
T = 0 in the other, or P may be directed in such a way that T is maximum in both cables. The second<br />
possibility is investigated first.<br />
Free-Body Diagram At C:<br />
Force Triangle<br />
Force triangle is isoceles with 2β = 180°− 85°<br />
β = 47.5°<br />
P = 2( 900 N)<br />
cos47.5° = 1216 N<br />
Since P > 0, solution is correct<br />
(a)<br />
P = 1216 N !<br />
α = 180°− 55° − 47.5° = 77.5°<br />
(b) α = 77.5°!<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 61.<br />
Note: Refer to Note in Problem 2.60<br />
Free-Body Diagram At C:<br />
Force Triangle<br />
(a) Law of Cosines<br />
P<br />
2<br />
2 2<br />
( ) ( ) ( )( )<br />
= 1400 N + 700 N − 2 1400 N 700 N cos85°<br />
or<br />
P = 1510 N !<br />
(b) Law of Sines<br />
sin β sin85°<br />
=<br />
1400 N 1510 N<br />
sin β = 0.92362<br />
β = 67.461°<br />
α = 180° − 55° − 67.461°<br />
or α = 57.5°!<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 62.<br />
Free-Body Diagram At C: Σ F x = 0:<br />
2T<br />
− 1200 N = 0<br />
x<br />
T x<br />
= 600 N<br />
( ) ( ) 2<br />
2 2<br />
x + y =<br />
T T T<br />
2 2<br />
2<br />
y<br />
( 600 N) + ( T ) = ( 870 N)<br />
T y<br />
= 630 N<br />
By similar triangles:<br />
AC 1.8 m<br />
=<br />
870 N 630 N<br />
AC = 2.4857 m<br />
L = 2( AC )<br />
L = 2( 2.4857 m)<br />
L = 4.97 m<br />
L = 4.97 m "<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 63.<br />
T BC must be perpendicular to F AC to be as small as possible.<br />
Free-Body Diagram: C<br />
Force Triangle is a Right Triangle<br />
(a) We observe: α = 55°<br />
α = 55°!<br />
(b) ( )<br />
T = 400 lb sin 60°<br />
BC<br />
or<br />
T = 346.41 lb T = 346 lb !<br />
BC<br />
BC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 64.<br />
At Collar A ... Have F = k( L′<br />
− L )<br />
For stretched length<br />
For unstretched length<br />
s AB AB<br />
( 12 in. ) ( 16 in. )<br />
L ′ = +<br />
AB<br />
L′<br />
AB =<br />
20 in.<br />
L = 12 2 in.<br />
AB<br />
2 2<br />
Then F s = ( − )<br />
4 lb/in. 20 12 2 in.<br />
F s<br />
= 12.1177 lb<br />
For the collar ...<br />
Σ F y =<br />
0<br />
4<br />
− W + ( 12.1177 lb ) = 0<br />
5<br />
W = 9.69 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 65.<br />
At Collar A ...<br />
Σ F y =<br />
0:<br />
h<br />
− 9lb+ F 0<br />
2 2<br />
s =<br />
12 + h<br />
or<br />
hF = 9 144 + h<br />
s<br />
Now F = k( L′<br />
− L )<br />
Where the stretched length<br />
2<br />
s AB AB<br />
( ) 2 2<br />
12 in.<br />
L′ = + h<br />
AB<br />
L AB<br />
= 12 2 in.<br />
Then<br />
hF = 9 144 + h<br />
s<br />
Becomes<br />
⎡<br />
⎢ ( )<br />
2<br />
h 3 lb/in. 144 + − 12 2<br />
⎤<br />
= 9 144 +<br />
⎣<br />
h ⎥⎦<br />
h<br />
h − 3 144 + h = 12 2 h<br />
or ( )<br />
2<br />
2 2<br />
<strong>Sol</strong>ving Numerically ...<br />
h = 16.81 in. ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 66.<br />
Free-Body Diagram: B (a) Have: T + F + T = 0<br />
where magnitude and direction of<br />
of<br />
F AB is known.<br />
BD AB BC<br />
T BD are known, and the direction<br />
Then, in a force triangle:<br />
By observation, T BC is minimum when α = 90.0°⊳<br />
(b) Have T = ( 310 N) sin ( 180° − 70° − 30°<br />
)<br />
BC<br />
= 305.29 N<br />
TBC<br />
= 305 N ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 67.<br />
Free-Body Diagram At C:<br />
Since T<br />
AB<br />
= T = 140 lb, Force triangle is isosceles:<br />
BC<br />
With 2β + 75° = 180°<br />
β = 52.5°<br />
Then α = 90° − 52.5° − 30°<br />
α = 7.50°<br />
P<br />
( 140 lb)<br />
cos52.5<br />
2 = °<br />
P = 170.453 lb<br />
P = 170.5 lb 7.50° ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 68.<br />
Free-Body Diagram of Pulley<br />
(a)<br />
(b)<br />
(c)<br />
(d)<br />
2<br />
( )( )<br />
Σ F = 0: 2T<br />
− 280 kg 9.81 m/s = 0<br />
y<br />
T =<br />
1<br />
( 2746.8 N )<br />
2<br />
2<br />
( )( )<br />
Σ F = 0: 2T<br />
− 280 kg 9.81 m/s = 0<br />
y<br />
T =<br />
1<br />
( 2746.8 N )<br />
2<br />
2<br />
( )( )<br />
Σ F = 0: 3T<br />
− 280 kg 9.81 m/s = 0<br />
y<br />
1<br />
T = ( 2746.8 N )<br />
3<br />
2<br />
( )( )<br />
Σ F = 0: 3T<br />
− 280 kg 9.81 m/s = 0<br />
y<br />
1<br />
T = ( 2746.8 N )<br />
3<br />
T = 1373 N ⊳<br />
T = 1373 N ⊳<br />
T = 916 N ⊳<br />
T = 916 N ⊳<br />
(e)<br />
2<br />
( )( )<br />
Σ F = 0: 4T<br />
− 280 kg 9.81 m/s = 0<br />
y<br />
T =<br />
1<br />
( 2746.8 N )<br />
4<br />
T = 687 N ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 69.<br />
Free-Body Diagram of Pulley and<br />
Crate<br />
(b)<br />
2<br />
( )( )<br />
Σ F = 0: 3T<br />
− 280 kg 9.81 m/s = 0<br />
y<br />
1<br />
T = ( 2746.8 N )<br />
3<br />
T = 916 N ⊳<br />
(d)<br />
2<br />
( )( )<br />
Σ F = 0: 4T<br />
− 280 kg 9.81 m/s = 0<br />
y<br />
T =<br />
1<br />
( 2746.8 N )<br />
4<br />
T = 687 N ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 70.<br />
Free-Body Diagram: Pulley C<br />
(a) F T ( ) ( )<br />
Σ = 0: cos30° − cos50° − 800 N cos50° = 0<br />
x<br />
ACB<br />
Hence<br />
T ACB =<br />
2303.5 N<br />
(b) ( ) ( )<br />
Σ F = 0: T sin 30°+ sin 50° + 800 N sin 50°− Q = 0<br />
y<br />
ACB<br />
TACB<br />
= 2.30 kN ⊳<br />
( )( ) ( )<br />
2303.5 N sin 30°+ sin 50° + 800 N sin 50°− Q = 0<br />
or<br />
Q = 3529.2 N<br />
Q = 3.53 kN ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 71.<br />
Free-Body Diagram: Pulley C<br />
( )<br />
Σ F = 0: T cos30° − cos50° − Pcos50° = 0<br />
x<br />
ACB<br />
or P = 0.34730T ACB<br />
(1)<br />
( )<br />
Σ F = 0: T sin30° + sin50° + Psin50° − 2000 N = 0<br />
y<br />
ACB<br />
or 1.26604T + 0.76604P = 2000 N<br />
(2)<br />
(a) Substitute Equation (1) into Equation (2):<br />
ACB<br />
( )<br />
1.26604T + 0.76604 0.34730T<br />
= 2000 N<br />
ACB<br />
ACB<br />
Hence:<br />
T ACB<br />
= 1305.41 N<br />
TACB<br />
= 1305 N ⊳<br />
(b) Using (1)<br />
P = 0.34730( 1305.41 N)<br />
= 453.37 N<br />
P<br />
=<br />
453 N ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 72.<br />
First replace 30 lb forces by their resultant Q:<br />
Q = 230lbcos25<br />
( ) °<br />
Q = 54.378 lb<br />
Equivalent loading at A:<br />
Law of Cosines:<br />
2 2 2<br />
( ) ( ) ( ) ( )( ) ( α) ( α)<br />
120 lb = 100 lb + 54.378 lb − 2 100 lb 54.378 lb cos 125° − cos 125° − = − 0.132685<br />
This gives two values: 125°− α = 97.625°<br />
Thus for R < 120 lb:<br />
α = 27.4°<br />
125°− α =− 97.625°<br />
α = 223°<br />
27.4°< α < 223°!<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 73.<br />
(a) ( )<br />
F = 950 lb sin 50° cos 40°<br />
x<br />
= 557.48 lb<br />
F y<br />
=− ( 950 lb)<br />
cos50°<br />
F = 557 lb !<br />
x<br />
=− 610.65 lb<br />
F =−611 lb !<br />
y<br />
( )<br />
F = 950 lb sin50° sin 40°<br />
z<br />
= 467.78 lb<br />
F = 468 lb !<br />
z<br />
(b)<br />
cosθ =<br />
x<br />
557.48 lb<br />
950 lb<br />
or θ x = 54.1°<br />
!<br />
cosθ<br />
y<br />
=<br />
−610.65 lb<br />
950 lb<br />
or θ y = 130.0°<br />
!<br />
cosθ =<br />
z<br />
467.78 lb<br />
950 lb<br />
or θ z = 60.5°<br />
!<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 74.<br />
(a) F ( )<br />
x<br />
=− 810 lb cos 45° sin 25°<br />
=− 242.06 lb<br />
F y<br />
=− ( 810 lb)<br />
sin 45°<br />
F =−242 lb !<br />
x<br />
=− 572.76 lb<br />
F =−573 lb !<br />
y<br />
F z<br />
= ( 810 lb)<br />
cos 45° cos 25°<br />
= 519.09 lb<br />
F = 519 lb !<br />
z<br />
(b)<br />
cosθ<br />
x<br />
=<br />
−242.06 lb<br />
810 lb<br />
or θ x = 107.4°<br />
!<br />
cosθ<br />
y<br />
=<br />
−572.76 lb<br />
810 lb<br />
or θ y = 135.0°<br />
!<br />
cosθ =<br />
z<br />
519.09 lb<br />
810 lb<br />
or θ z = 50.1°<br />
!<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 75.<br />
(a) F ( )<br />
x<br />
= 900 N cos30° cos 25°<br />
= 706.40 N<br />
F y<br />
= ( 900 N)<br />
sin 30°<br />
F = 706 N !<br />
x<br />
= 450.00 N<br />
F = 450 N !<br />
y<br />
F z<br />
=− ( 900 N)<br />
cos30° sin 25°<br />
=− 329.04 N<br />
F =−329 N !<br />
z<br />
(b)<br />
cosθ =<br />
x<br />
706.40 N<br />
900 N<br />
or θ x = 38.3°<br />
!<br />
cosθ =<br />
y<br />
450.00 N<br />
900 N<br />
or θ y = 60.0°<br />
!<br />
cosθ<br />
z<br />
=<br />
−329.40 N<br />
900 N<br />
or θ z = 111.5°<br />
!<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 76.<br />
(a) ( )<br />
F =− 1900 N sin 20° sin 70°<br />
x<br />
=− 610.65 N<br />
F =− 611 N !<br />
x<br />
( )<br />
F = 1900 N cos 20°<br />
y<br />
= 1785.42 N<br />
F = 1785 N !<br />
y<br />
( )<br />
F = 1900 N sin 20° cos70°<br />
z<br />
= 222.26 N<br />
F = 222 N !<br />
z<br />
(b)<br />
cos<br />
θ x<br />
=<br />
−610.65 N<br />
1900 N<br />
or θ x = 108.7°!<br />
1785.42 N<br />
cosθ y =<br />
1900 N<br />
or θ y = 20.0°!<br />
cosθ =<br />
z<br />
222.26 N<br />
1900 N<br />
or θ z = 83.3°!<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 77.<br />
(a) ( )<br />
F = 180 lb cos35° sin 20°<br />
x<br />
= 50.430 lb<br />
( )<br />
F =− 180 lb sin 35°<br />
y<br />
F = 50.4 lb !<br />
x<br />
=− 103.244 lb<br />
F =− 103.2 lb !<br />
y<br />
( )<br />
F = 180 lb cos35° cos 20°<br />
z<br />
= 138.555 lb<br />
F = 138.6 lb !<br />
z<br />
(b)<br />
50.430 lb<br />
cosθ x =<br />
180 lb<br />
or θ x = 73.7°!<br />
cos<br />
θ y<br />
=<br />
−103.244 lb<br />
180 lb<br />
or θ y = 125.0°!<br />
138.555 lb<br />
cosθ z =<br />
180 lb<br />
or θ z = 39.7°!<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 78.<br />
(a) ( )<br />
F x = 180 lb cos30° cos 25°<br />
= 141.279 lb<br />
(b)<br />
( )<br />
F =− 180 lb sin 30°<br />
y<br />
=− 90.000 lb<br />
( )<br />
F z = 180 lb cos30° sin 25°<br />
= 65.880 lb<br />
141.279 lb<br />
cosθ x =<br />
180 lb<br />
cos<br />
θ y<br />
−90.000 lb<br />
=<br />
180 lb<br />
F = 141.3 lb !<br />
x<br />
F =− 90.0 lb !<br />
y<br />
F = 65.9 lb !<br />
z<br />
or θ x = 38.3°!<br />
or θ y = 120.0°!<br />
cosθ =<br />
z<br />
65.880 lb<br />
180 lb<br />
or θ z = 68.5°!<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 79.<br />
(a) ( )<br />
F = − 220 N cos60° cos35°<br />
x<br />
= − 90.107 N<br />
F =−90.1 N <br />
x<br />
( )<br />
F = 220 N sin 60°<br />
y<br />
= 190.526 N<br />
F y = 190.5 N <br />
( )<br />
F = − 220 N cos60° sin 35°<br />
z<br />
= − 63.093 N<br />
F =−63.1 N <br />
z<br />
(b)<br />
cos<br />
θ x<br />
=<br />
− 90.<br />
107 Ν<br />
220 N<br />
θ = 114.2° <br />
x<br />
190.526 N<br />
cosθ y =<br />
220 N<br />
θ = 30.0° <br />
y<br />
cos<br />
θ z<br />
=<br />
−63.093 N<br />
220 N<br />
θ = 106.7° <br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 80.<br />
(a)<br />
F = 180 N<br />
x<br />
With<br />
Fx<br />
= Fcos60° cos35°<br />
180 N = F cos60° cos35°<br />
or F = 439.38 N<br />
F = 439 N !<br />
(b)<br />
cosθ =<br />
x<br />
180 N<br />
439.48 N<br />
θ = 65.8°!<br />
x<br />
( )<br />
F = 439.48 N sin 60°<br />
y<br />
F y =<br />
380.60 N<br />
380.60 N<br />
cosθ y =<br />
439.48 N<br />
θ = 30.0°!<br />
y<br />
( )<br />
F =− 439.48 N cos60° sin 35°<br />
z<br />
F =− 126.038 N<br />
z<br />
cos<br />
θ z<br />
=<br />
−126.038 N<br />
439.48 N<br />
θ = 106.7°!<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 81.<br />
2 2 2<br />
x y z<br />
F = F + F + F<br />
( 65 N) ( 80 N) ( 200 N)<br />
2 2 2<br />
F = + − + −<br />
F = 225 N !<br />
Fx<br />
cosθ x = =<br />
F<br />
65 N<br />
225 N<br />
θ = 73.2°!<br />
x<br />
cosθ<br />
y<br />
Fy<br />
= =<br />
F<br />
−80 N<br />
225 N<br />
θ = 110.8°!<br />
y<br />
Fz<br />
cosθ<br />
z = =<br />
F<br />
− 200 N<br />
225 N<br />
θ = 152.7°!<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 82.<br />
2 2 2<br />
x y z<br />
F = F + F + F<br />
( 450 N) ( 600 N) ( 1800 N)<br />
2 2 2<br />
F = + + −<br />
Fx<br />
450 N<br />
cosθ x = =<br />
F 1950 N<br />
Fy<br />
600 N<br />
cosθ y = =<br />
F 1950 N<br />
F = 1950 N !<br />
θ = 76.7°!<br />
x<br />
θ = 72.1°!<br />
y<br />
Fz<br />
cosθ<br />
z = =<br />
F<br />
−1800 N<br />
1950 N<br />
θ = 157.4°!<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 83.<br />
2 2<br />
2<br />
x y z<br />
(a) We have ( θ ) ( θ ) ( θ )<br />
cos + cos + cos = 1<br />
( cosθy) = 1 − ( cosθx) − ( cosθz)<br />
2 2 2<br />
Since F y < 0 we must have cosθ y < 0<br />
2 2<br />
Thus cosθ =− 1 − ( cos 43.2° ) − cos( 83.8°<br />
)<br />
y<br />
cosθ y =− 0.67597<br />
θ = 132.5°!<br />
y<br />
(b) Then:<br />
F<br />
=<br />
F<br />
y<br />
cosθ<br />
y<br />
F<br />
−50 lb<br />
= − 0.67597<br />
73.968 lb<br />
F =<br />
And<br />
F = Fcosθ<br />
x<br />
x<br />
( )<br />
F = 73.968 lb cos 43.2°<br />
x<br />
F = 53.9 lb !<br />
x<br />
F = Fcosθ<br />
z<br />
z<br />
( )<br />
F = 73.968 lb cos83.8°<br />
z<br />
F = 7.99 lb !<br />
z<br />
F = 74.0 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 84.<br />
2 2<br />
2<br />
x y z<br />
(a) We have ( θ ) ( θ ) ( θ )<br />
cos + cos + cos = 1<br />
2<br />
2<br />
( θ ) = − ( θ ) − ( θ ) 2<br />
or cos 1 cos cos<br />
z x y<br />
Since F z < 0 we must have cosθ z < 0<br />
2 2<br />
Thus cosθ =− 1 − ( cos113.2° ) − cos( 78.4°<br />
)<br />
z<br />
cosθ z =− 0.89687<br />
θ = 153.7°!<br />
z<br />
(b) Then:<br />
F<br />
Fz<br />
−35 lb<br />
= =<br />
cosθ<br />
− 0.89687<br />
z<br />
F = 39.<strong>02</strong>5 lb<br />
And<br />
F = Fcosθ<br />
x<br />
x<br />
( )<br />
F = 39.<strong>02</strong>5 lb cos113.2°<br />
x<br />
F =− 15.37 lb !<br />
x<br />
F = Fcosθ<br />
y<br />
y<br />
( )<br />
F = 39.<strong>02</strong>5 lb cos78.4°<br />
y<br />
F = 7.85 lb !<br />
y<br />
F = 39.0 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 85.<br />
(a) We have F = Fcosθ<br />
y<br />
y<br />
( )<br />
F = 250 N cos 72.4°<br />
y<br />
F y =<br />
75.592 N<br />
F = 75.6 N !<br />
y<br />
Then<br />
2 2 2 2<br />
= x + y + z<br />
F F F F<br />
( ) ( ) ( )<br />
2 2 2 2<br />
250 N = 80 N + 75.592 N + Fz<br />
F z =<br />
224.47 N<br />
F = 224 N !<br />
z<br />
Fx<br />
(b) cosθ x =<br />
F<br />
cosθ =<br />
x<br />
80 N<br />
250 N<br />
θ = 71.3°!<br />
x<br />
cosθ =<br />
z<br />
cosθ =<br />
z<br />
Fz<br />
F<br />
224.47 N<br />
250 N<br />
θ = 26.1°!<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 86.<br />
(a) Have F = Fcosθ<br />
x<br />
x<br />
( )<br />
F = 320 N cos104.5°<br />
x<br />
F =− 80.122 N<br />
x<br />
F =− 80.1 N !<br />
x<br />
Then:<br />
2 2 2 2<br />
= x + y + z<br />
F F F F<br />
2<br />
( 320 N) = ( − 80.122 N) + + ( − 120 N)<br />
2 2 F 2<br />
y<br />
F y =<br />
285.62 N<br />
F = 286 N !<br />
y<br />
(b)<br />
cosθ =<br />
y<br />
cosθ =<br />
y<br />
F<br />
y<br />
F<br />
285.62 N<br />
320 N<br />
θ = 26.8°!<br />
y<br />
cosθ =<br />
z<br />
Fz<br />
F<br />
cos<br />
θ z<br />
=<br />
−120 N<br />
320 N<br />
θ = 112.0°!<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 87.<br />
!!!"<br />
DB = i − j − k<br />
( 36 in. ) ( 42 in. ) ( 36 in. )<br />
( ) ( ) ( )<br />
2 2 2<br />
DB = 36 in. + − 42 in. + − 36 in. = 66 in.<br />
T<br />
= T λ = T<br />
DB DB DB DB<br />
!!!"<br />
DB<br />
DB<br />
T 55 lb<br />
( 36 in. ) ( 42 in. ) ( 36 in. )<br />
DB =<br />
66 in.<br />
⎡ ⎣ i − j − k ⎤ ⎦<br />
( 30 lb) ( 35 lb) ( 30 lb)<br />
= i − j − k<br />
T = !<br />
∴ ( ) 30.0 lb<br />
DB<br />
x<br />
( ) 35.0 lb<br />
T =− !<br />
DB<br />
y<br />
( ) 30.0 lb<br />
T =− !<br />
DB<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 88.<br />
!!!"<br />
EB = i − j + k<br />
( 36 in. ) ( 45 in. ) ( 48 in. )<br />
( ) ( ) ( )<br />
2 2 2<br />
EB = 36 in. + − 45 in. + 48 in. = 75 in.<br />
T<br />
= T λ = T<br />
EB EB EB EB<br />
!!!"<br />
EB<br />
EB<br />
T 60 lb<br />
( 36 in. ) ( 45 in. ) ( 48 in. )<br />
EB =<br />
75 in.<br />
⎡ ⎣ i − j + k ⎤ ⎦<br />
( 28.8 lb) ( 36 lb) ( 38.4 lb)<br />
= i − j + k<br />
T = !<br />
∴ ( ) 28.8 lb<br />
EB<br />
x<br />
( ) 36.0 lb<br />
T =− !<br />
EB<br />
y<br />
( ) 38.4 lb<br />
T = !<br />
EB<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 89.<br />
!!!"<br />
BA = i + j − k<br />
( 4 m) ( 20 m) ( 5 m)<br />
( ) ( ) ( )<br />
2 2 2<br />
BA = 4 m + 20 m + − 5 m = 21 m<br />
!!!"<br />
F BA 2100 N<br />
= Fλ<br />
BA = F = ⎡( 4 m ) + ( 20 m ) − ( 5 m ) ⎤<br />
BA 21 m<br />
⎣ i j k ⎦<br />
( 400 N) ( 2000 N) ( 500 N)<br />
F = i + j − k<br />
F =+ 400 N, F =+ 2000 N, F =− 500 N !<br />
x y z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 90.<br />
!!!"<br />
DA = i + j + k<br />
( 4 m) ( 20 m) ( 14.8 m)<br />
( ) ( ) ( )<br />
2 2 2<br />
DA = 4 m + 20 m + 14.8 m = 25.2 m<br />
!!!"<br />
F DA 1260 N<br />
= Fλ<br />
DA = F = ⎡( 4 m ) + ( 20 m ) + ( 14.8 m ) ⎤<br />
DA 25.2 m<br />
⎣ i j k ⎦<br />
( 200 N) ( 1000 N) ( 740 N)<br />
F = i + j + k<br />
F =+ 200 N, F =+ 1000 N, F =+ 740 N !<br />
x y z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 91.<br />
uuuv<br />
BG =− i + j − k<br />
( 1 m) ( 1.85 m) ( 0.8 m)<br />
( 1 m) ( 1.85 m) ( 0.8 m)<br />
2 2 2<br />
BG = − + + −<br />
BG = 2.25 m<br />
T<br />
= T λ = T<br />
BG BG BG BG<br />
uuuv<br />
BG<br />
BG<br />
T 450 N<br />
( 1 m) ( 1.85 m) ( 0.8 m)<br />
BG =<br />
2.25 m<br />
⎡ ⎣− i + j − k ⎤ ⎦<br />
( 200 N) ( 370 N) ( 160 N)<br />
=− i + j − k<br />
∴ ( T BG ) x<br />
= −200 N ⊳<br />
( ) 370 N<br />
T = ⊳<br />
BG<br />
y<br />
( T BG ) z<br />
=−160.0 N ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 92.<br />
uuuuv<br />
BH = i + j − k<br />
( 0.75 m) ( 1.5 m) ( 1.5 m)<br />
( 0.75 m) ( 1.5 m) ( 1.5 m)<br />
2 2 2<br />
BH = + + −<br />
T<br />
= 2.25 m<br />
= T λ = T<br />
BH BH BH BH<br />
uuuuv<br />
BH<br />
BH<br />
T 600 N<br />
( 0.75 m ) ( 1.5 m ) ( 1.5 m )<br />
BH =<br />
2.25 m<br />
⎡ ⎣ i + j − k ⎤ ⎦<br />
( 200 N) ( 400 N) ( 400 N)<br />
= i + j − k<br />
∴ ( T BH ) x<br />
= 200 N ⊳<br />
( ) 400 N<br />
T = ⊳<br />
BH<br />
y<br />
( ) 400 N<br />
T =− ⊳<br />
BH<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 93.<br />
( 4 kips)[ cos30 sin 20 sin 30 cos30 cos 20 ]<br />
( 1.18479 kips) i ( 2 kips) j ( 3.2552 kips)<br />
k<br />
( 8 kips)[ cos 45 sin15 sin 45 cos 45 cos15 ]<br />
( 1.46410 kips) i ( 5.6569 kips) j ( 5.4641 kips)<br />
k<br />
( 0.27931 kip) ( 3.6569 kips) ( 2.2089 kips)<br />
P = ° ° i − ° j + ° ° k<br />
= − +<br />
Q = − ° ° i + ° j − ° ° k<br />
=− + −<br />
R = P + Q = − i + j −<br />
k<br />
( 0.27931 kip) ( 3.6569 kips) ( 2.2089 kips)<br />
2 2 2<br />
R = − + + −<br />
R = 4.2814 kips<br />
or R = 4.28 kips ⊳<br />
Rx<br />
−0.27931 kip<br />
cosθ<br />
x = = = − 0.065238<br />
R 4.2814 kips<br />
Ry<br />
3.6569 kips<br />
cosθ y = = = 0.85414<br />
R 4.2814 kips<br />
Rz<br />
− 2.2089 kips<br />
cosθz<br />
= = = − 0.51593<br />
R 4.2814 kips<br />
or θ x = 93.7°⊳<br />
θ = 31.3°⊳<br />
y<br />
θ = 121.1°⊳<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 94.<br />
( 6 kips)[ cos30 sin 20 sin 30 cos30 cos 20 ]<br />
P = ° ° i − ° j + ° ° k<br />
( 1.77719 kips) ( 3 kips) ( 4.8828 kips)<br />
= i − j +<br />
k<br />
( 7 kips)[ cos 45 sin15 sin 45 cos 45 cos15 ]<br />
Q = − ° ° i + ° j − ° ° k<br />
( 1.28109 kips) ( 4.94975 kips) ( 4.7811 kips)<br />
( 0.49610 kip) ( 1.94975 kips) ( 0.101700 kip)<br />
=− i + j −<br />
k<br />
R = P + Q = i + j +<br />
k<br />
( 0.49610 kip) ( 1.94975 kips) ( 0.101700 kip)<br />
2 2 2<br />
R = + +<br />
R = 2.0144 kips<br />
or R = 2.01 kips ⊳<br />
Rx<br />
0.49610 kip<br />
cosθ x = = = 0.24628<br />
R 2.0144 kips<br />
Ry<br />
1.94975 kips<br />
cosθ y = = = 0.967906<br />
R 2.0144 kips<br />
Rz<br />
0.101700 kip<br />
cosθ z = = = 0.050486<br />
R 2.0144 kips<br />
or θ x = 75.7°⊳<br />
θ = 14.56°⊳<br />
y<br />
θ = 87.1°⊳<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 95.<br />
AB<br />
uuur<br />
AB =− i + j + k<br />
( 600 mm) ( 360 mm) ( 270 mm)<br />
( 600 mm) ( 360 mm) ( 270 mm)<br />
2 2 2<br />
AB = − + +<br />
AB = 750 mm<br />
uuuv<br />
AC =− 600 mm i + 320 mm j − 510 mm k<br />
( ) ( ) ( )<br />
( 600 mm) ( 320 mm) ( 510 mm)<br />
2 2 2<br />
AC = − + + −<br />
AC = 850 mm<br />
uuur<br />
T AB 510 N<br />
AB = TAB<br />
= ⎡− ( 600 mm) + ( 360 mm) + ( 270 mm)<br />
⎤<br />
AB 750 mm<br />
⎣ i j k ⎦<br />
( 408 N) ( 244.8 N) ( 183.6 N)<br />
T AB =− i + j + k<br />
uuur<br />
T AC 765 N<br />
AC = TAC<br />
= ⎡− ( 600 mm) + ( 320 mm) − ( 510 mm)<br />
⎤<br />
AC 850 mm<br />
⎣ i j k ⎦<br />
( 540 N) ( 288 N) ( 459 N)<br />
T AC =− i + j − k<br />
AC<br />
( 948 N) ( 532.8 N) ( 275.4 N)<br />
R = T + T = − i + j − k<br />
Then<br />
and<br />
cos<br />
R = 1121.80 N<br />
R = 1122 N ⊳<br />
θ x<br />
−948 N<br />
= θ x = 147.7°⊳<br />
1121.80 N<br />
532.8 N<br />
cosθ y =<br />
1121.80 N<br />
θ y = 61.6°⊳<br />
− 275.4 N<br />
cosθ z =<br />
1121.80 N<br />
θ z = 104.2°⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 96.<br />
AB<br />
!!!"<br />
AB =− i + j + k<br />
( 600 mm) ( 360 mm) ( 270 mm)<br />
( ) ( ) ( )<br />
2 2 2<br />
AB = − 600 mm + 360 mm + 270 mm = 750 mm<br />
AB = 750 mm<br />
!!!"<br />
AC =− 600 mm i + 320 mm j − 510 mm k<br />
( ) ( ) ( )<br />
( ) ( ) ( )<br />
2 2 2<br />
AC = − 600 mm + 320 mm + − 510 mm = 850 mm<br />
AC = 850 mm<br />
!!!"<br />
T AB 765 N<br />
AB = TAB<br />
= ⎡− ( 600 mm) + ( 360 mm) + ( 270 mm)<br />
⎤<br />
AB 750 mm<br />
⎣ i j k ⎦<br />
( 612 N) ( 367.2 N) ( 275.4 N)<br />
T AB =− i + j + k<br />
!!!"<br />
T AC 510 N<br />
AC = TAC<br />
= ⎡− ( 600 mm) + ( 320 mm) − ( 510 mm)<br />
⎤<br />
AC 850 mm<br />
⎣ i j k ⎦<br />
( 360 N) ( 192 N) ( 306 N)<br />
T AC =− i + j − k<br />
AC<br />
( 972 N) ( 559.2 N) ( 30.6 N)<br />
R = T + T = − i + j − k<br />
Then<br />
R = 1121.80 N<br />
R = 1122 N !<br />
−972 N<br />
cosθ x = θ x = 150.1°!<br />
1121.80 N<br />
559.2 N<br />
cosθ y = θ y = 60.1°!<br />
1121.80 N<br />
−30.6 N<br />
cosθ z = θ z = 91.6°!<br />
1121.80 N<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 97.<br />
Have T ( 760 lb)( sin 50 cos 40 i cos50 j sin 50 sin 40 k )<br />
AB = ° ° − ° + ° °<br />
AC<br />
AC<br />
( cos 45 sin 25 sin 45 cos 45 cos 25 )<br />
T = T − ° ° i − ° j + ° ° k<br />
(a) R = T + T<br />
( R ) = 0<br />
A AB AC A x<br />
( )<br />
( R ) F 0:<br />
∴ = Σ =<br />
A<br />
x<br />
760 lb sin 50° cos 40° − cos 45° sin 25° = 0<br />
T AC<br />
x<br />
or<br />
T = 1492.41 lb<br />
AC<br />
∴ = 1492 lb ⊳<br />
(b) ( RA) =Σ Fy<br />
= ( − 760 lb) cos50°− ( 1492.41 lb)<br />
sin 45°<br />
y<br />
( R A) y<br />
=− 1543.81 lb<br />
( RA) Fz<br />
( 760 lb) sin 50 sin 40 ( 1492.41 lb)<br />
cos 45 cos 25<br />
z<br />
( R A) z<br />
= 1330.65 lb<br />
∴ = − ( 1543.81 lb) + ( 1330.65 lb)<br />
Then<br />
T AC<br />
=Σ = ° °+ ° °<br />
R j k<br />
A<br />
R A = 2038.1 lb<br />
R A = 2040 lb ⊳<br />
0<br />
cosθ x =<br />
2038.1 lb<br />
θ x = 90.0°⊳<br />
cos<br />
θ y<br />
−1543.81 lb<br />
= θ y = 139.2°⊳<br />
2038.1 lb<br />
1330.65 lb<br />
cosθ z = θ z = 49.2°⊳<br />
2038.1 lb<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 98.<br />
Have T = T ( sin 50° cos 40° i − cos50° j + sin 50° sin 40°<br />
k )<br />
AB<br />
AB<br />
( 980 lb)( cos 45 sin 25 sin 45 cos 45 cos 25 )<br />
T AC = − ° ° i − ° j + ° ° k<br />
(a) R = T + T<br />
( R ) = 0<br />
A AB AC A x<br />
AB<br />
( R ) F 0:<br />
∴ = Σ =<br />
A<br />
x<br />
( )<br />
T sin 50° cos 40° − 980 lb cos 45° sin 25° = 0<br />
x<br />
or<br />
T AB =<br />
499.06 lb<br />
∴ = 499 lb ⊳<br />
T AB<br />
(b) ( RA) F<br />
y y ( ) ( )<br />
( R A) y<br />
=− 1013.75 lb<br />
( RA) F<br />
z z ( ) ( )<br />
( R A) z<br />
= 873.78 lb<br />
∴ R = − ( 1013.75 lb) j + ( 873.78 lb)<br />
k<br />
Then<br />
and<br />
A<br />
=Σ =− 499.06 lb cos50°− 980 lb sin 45°<br />
=Σ = 499.06 lb sin 50° sin 40°+ 980 lb cos 45° cos 25°<br />
R = 1338.35 lb<br />
R = 1338 lb ⊳<br />
A<br />
0<br />
cosθ x = θ x = 90.0°⊳<br />
1338.35 lb<br />
A<br />
cos<br />
θ y<br />
−1013.75 lb<br />
= θ y = 139.2°⊳<br />
1338.35 lb<br />
873.78 lb<br />
cosθ z = θ z = 49.2°⊳<br />
1338.35 lb<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 99.<br />
!!!"<br />
Cable AB: AB =− ( 600 mm) + ( 360 mm) + ( 270 mm)<br />
i j k<br />
( ) ( ) ( )<br />
2 2 2<br />
AB = − 600 mm + 360 mm + 270 mm = 750 mm<br />
!!!"<br />
T AB 600 N<br />
AB = TAB<br />
= ⎡− ( 600 mm) + ( 360 mm) + ( 270 mm)<br />
⎤<br />
AB 750 mm<br />
⎣ i j k ⎦<br />
( 480 N) ( 288 N) ( 216 N)<br />
T AB =− i + j + k<br />
!!!"<br />
AC =− 600 mm i + 320 mm j − 510 mm k<br />
Cable AC: ( ) ( ) ( )<br />
( ) ( ) ( )<br />
2 2 2<br />
AC = − 600 mm + 320 mm + − 510 mm = 850 mm<br />
!!!"<br />
T AC TAC<br />
AC = TAC<br />
= ⎡− ( 600 mm) + ( 320 mm) − ( 510 mm)<br />
⎤<br />
AC 850 mm<br />
⎣ i j k ⎦<br />
60 32 51<br />
TAC =− TACi + TACj − TACk<br />
85 85 85<br />
Load P:<br />
P =−P<br />
j<br />
51<br />
(a) ( RA) =Σ Fz = 0: ( 216 N)<br />
− TAC<br />
= 0<br />
or T 360 N<br />
z<br />
AC = !<br />
85<br />
32<br />
RA =Σ Fy = 0: 288 N + TAC<br />
− P = 0 or P = 424 N !<br />
y<br />
85<br />
(b) ( ) ( )<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 100.<br />
uuur<br />
Cable AB: AB =−( 4m) − ( 20m) + ( 5m)<br />
i j k<br />
( ) ( ) ( )<br />
2 2 2<br />
AB = − 4 m + − 20 m + 5 m = 21m<br />
uuur<br />
T AB TAB<br />
AB = TAB<br />
= ⎡−( 4m) − ( 20m) + ( 5m)<br />
⎤<br />
AB 21 m<br />
⎣ i j k ⎦<br />
uuur<br />
AC = 12 m i − 20 m j + 3.6 m k<br />
Cable AC: ( ) ( ) ( )<br />
( ) ( ) ( )<br />
2 2 2<br />
AC = 12 m + − 20 m + 3.6 m = 23.6 m<br />
uuur<br />
T AC 1770 N ( 12 m ) ( 20 m ) ( 3.6 m<br />
AC = TAC<br />
= ⎡ − + ) ⎤<br />
AC 23.6 m<br />
⎣ i j k ⎦<br />
( 900 N) ( 1500 N) ( 270 N)<br />
= i − j + k<br />
uuur<br />
i j k<br />
Cable AD: AD =−( 4 m) − ( 20 m) + ( 14.8 m)<br />
Now...<br />
( ) ( ) ( )<br />
2 2 2<br />
AD = − 4 m + − 20 m + 14.8 m = 25.2 m<br />
uuur<br />
T AD TAD<br />
AD = TAD<br />
= ⎡−( 4 m) − ( 20 m) + ( 14.8 m)<br />
⎤<br />
AD 25.2 m<br />
⎣ i j k ⎦<br />
T AD<br />
( 10 m) ( 50 m) ( 37 m)<br />
= ⎡− − − ⎤<br />
63 m<br />
⎣ i j k ⎦<br />
R = T + T + T and R = R; R = R = 0<br />
AB AC AD j x z<br />
4 10<br />
Σ Fx = 0: − TAB + 900 − TAD<br />
= 0<br />
(1)<br />
21 63<br />
5 37<br />
Σ Fy = 0: TAB + 270 − TAD<br />
= 0<br />
(2)<br />
21 63<br />
<strong>Sol</strong>ving equations (1) and (2) simultaneously yields:<br />
T = 1.775 kN !<br />
AD<br />
T = 3.25 kN !<br />
AB<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 101.<br />
2 2<br />
( ) ( )<br />
2 2<br />
( ) ( )<br />
( ) ( ) ( )<br />
TAB<br />
⎡ ( 450 mm) ( 600 mm)<br />
⎤<br />
d = − 450 mm + 600 mm = 750 mm<br />
AB<br />
d = 600 mm + − 320 mm = 680 mm<br />
AC<br />
2 2 2<br />
d = 500 mm + 600 mm + 360 mm = 860 mm<br />
AD<br />
T AB = − +<br />
750 mm<br />
⎣ i j ⎦<br />
T = − 0.6i + 0.8 j T<br />
AB<br />
( ) AB<br />
TAC<br />
⎡( 600 mm) ( 320 mm)<br />
T AC =<br />
680 mm<br />
⎣ j − k ⎤⎦<br />
T ⎛15 8 ⎞<br />
AC = ⎜ − TAC<br />
⎝<br />
⎟<br />
17 17<br />
⎠<br />
T TAD<br />
AD = ⎡( 500 mm) + ( 600 mm) + ( 360 mm)<br />
⎤<br />
860 mm<br />
⎣ ⎦<br />
T ⎛25 30 18 ⎞<br />
AD = ⎜ + + TAD<br />
⎝<br />
⎟<br />
43 43 43<br />
⎠<br />
W =−W j<br />
At point A: Σ F = 0: T + T + T + W = 0<br />
i component:<br />
k component:<br />
j component:<br />
From Equation (1):<br />
From Equation (3):<br />
AB AC AD<br />
25<br />
− 0.6TAB<br />
+ TAD<br />
= 0<br />
43<br />
or<br />
T<br />
AB<br />
= ⎛5⎞⎛25⎞<br />
⎜ T<br />
⎝<br />
⎟⎜ ⎟<br />
3⎠⎝43⎠<br />
18 18<br />
− TAC<br />
+ TAD<br />
= 0<br />
17 43<br />
17 18<br />
or TAC<br />
= ⎛ ⎞⎛ ⎞<br />
⎜ ⎟⎜ ⎟TAD<br />
(2)<br />
⎝ 8 ⎠⎝43⎠<br />
15 30<br />
0.8TAB + TAC + TAD<br />
− W = 0<br />
17 43<br />
15 ⎛17 18 ⎞ 30<br />
0.8TAB + ⎜ ⋅ TAD + TAD<br />
− W = 0<br />
17 ⎝<br />
⎟<br />
8 43 ⎠ 43<br />
255<br />
0.8TAB<br />
+ TAD<br />
− W = 0<br />
(3)<br />
172<br />
⎛5⎞⎛25⎞<br />
6kN= ⎜ TAD<br />
⎝<br />
⎟⎜ ⎟ 3 ⎠⎝ 43 ⎠<br />
or T AD = 6.1920 kN<br />
AD<br />
255<br />
0.8( 6 kN) + ( 6.1920 kN)<br />
− W = 0<br />
172<br />
(1)<br />
∴ W = 13.98 kN !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 1<strong>02</strong>.<br />
See Problem 2.101 for the figure and the analysis leading to the linear algebraic Equations (1), (2), and (3)<br />
below.<br />
T<br />
T<br />
AB<br />
AC<br />
⎛5⎞⎛25⎞<br />
= ⎜ T<br />
⎝ ⎟⎜ ⎟<br />
3⎠⎝43⎠<br />
AD<br />
⎛17⎞⎛18⎞<br />
= ⎜ T<br />
⎝ ⎟⎜ ⎟<br />
8 ⎠⎝43⎠<br />
AD<br />
(1)<br />
(2)<br />
From Equation (1)<br />
From Equation (3)<br />
255<br />
0.8TAB<br />
+ TAD<br />
− W = 0<br />
(3)<br />
172<br />
T AB<br />
⎛5⎞⎛25⎞<br />
= ⎜<br />
⎝ ⎟⎜ ⎟<br />
3⎠⎝43⎠<br />
( 4.3 kN)<br />
or<br />
T AB =<br />
4.1667 kN<br />
255<br />
0.8( 4.1667 kN) + ( 4.3 kN)<br />
− W = 0<br />
172<br />
∴ W = 9.71 kN !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 103.<br />
uuur<br />
AB =−<br />
( 4.20 m) i −( 5.60 m)<br />
2 2<br />
( ) ( )<br />
( 2.40 m) ( 5.60 m) ( 4.20 m)<br />
AB = − 4.20 m + − 5.60 m = 7.00 m<br />
uuur<br />
AC = i − j + k<br />
( ) ( ) ( )<br />
( 5.60 m) − ( 3.30 m)<br />
j<br />
2 2 2<br />
AC = 2.40 m + − 5.60 m + 4.20 m = 7.40 m<br />
uuur<br />
AD =− j k<br />
( ) ( )<br />
2 2<br />
AD = − 5.60 m + − 3.30 m = 6.50 m<br />
uuur<br />
AB TAB<br />
TAB = TABλAB = TAB<br />
= ( −4.20i − 5.60j)<br />
AB 7.00 m<br />
T ⎛ 3 4 ⎞<br />
AB = ⎜− − TAB<br />
⎝<br />
⎟<br />
5 i 5<br />
j ⎠<br />
uuur<br />
AC TAC<br />
TAC = TACλAC = T AC = 2.40i − 5.60j+<br />
4.20k<br />
AC 7.40 m<br />
( )<br />
T ⎛12 28 21 ⎞<br />
AC = ⎜ − + TAC<br />
⎝<br />
⎟<br />
37 i 37 j 37<br />
k ⎠<br />
uuur<br />
AD TAD<br />
TAD = TADλAD = TAD<br />
= −5.60j − 3.30k<br />
AD 6.50 m<br />
T ⎛ 56 33 ⎞<br />
AD = ⎜− − T<br />
⎝<br />
⎟<br />
65 j 65<br />
k ⎠<br />
P = P j<br />
AD<br />
For equilibrium at point A: Σ F = 0<br />
TAB + TAC + TAD<br />
+ P =<br />
( )<br />
0<br />
i component:<br />
3 12<br />
− TAB<br />
+ TAC<br />
= 0<br />
5 37<br />
or<br />
T<br />
AB<br />
20<br />
= TAC<br />
(1)<br />
37<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
j component:<br />
4 28 56<br />
− TAB − TAC − TAD<br />
+ P = 0<br />
5 37 65<br />
4 28 56⎛65 7 ⎞<br />
− TAB − TAC − ⎜ ⋅ TAC<br />
+ P = 0<br />
5 37 65⎝<br />
⎟<br />
11 37 ⎠<br />
4 700<br />
− TAB<br />
− TAC<br />
+ P = 0<br />
(2)<br />
5 407<br />
k component:<br />
21 33<br />
TAC<br />
− TAD<br />
= 0<br />
37 65<br />
or<br />
T<br />
AD<br />
⎛65⎞⎛ 7 ⎞<br />
= ⎜ T<br />
⎝ ⎟⎜ ⎟<br />
11⎠⎝37⎠<br />
AC<br />
(3)<br />
From Equation (1):<br />
⎛20⎞<br />
259 N = ⎜ TAC<br />
⎝<br />
⎟ 37 ⎠<br />
or T AC = 479.15 N<br />
4 700<br />
− 259 N − 479.15 N + P = 0<br />
5 407<br />
From Equation (2): ( ) ( )<br />
∴ P =1031 N !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 104.<br />
See Problem 2.103 for the analysis leading to the linear algebraic Equations (1), (2), and (3)<br />
T<br />
AB<br />
20<br />
= TAC<br />
(1)<br />
37<br />
4 700<br />
− TAB<br />
− TAC<br />
+ P = 0 (2)<br />
5 407<br />
T<br />
AD<br />
⎛65 ⎞⎛ 7 ⎞<br />
= ⎜ T<br />
11 ⎟⎜<br />
37 ⎟<br />
⎝ ⎠⎝ ⎠<br />
AC<br />
(3)<br />
Substituting for T = 444 N into Equation (1)<br />
AC<br />
20 444 N<br />
37<br />
240 N<br />
Gives T = ( )<br />
And from Equation (3)<br />
or<br />
AB<br />
T AB =<br />
4 700<br />
− ( 240 N) − ( 444 N)<br />
+ P = 0<br />
5 407<br />
∴ P = 956 N !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 105.<br />
BA<br />
2 2<br />
( 11 in. ) ( 9.6 in. ) 14.6 in.<br />
2 2<br />
( 9.6 in. ) ( 7.2 in. ) 12.0 in.<br />
2 2 2<br />
( ) ( ) ( )<br />
FBA<br />
( 11 in. ) ( 9.6 in. )<br />
d = − + =<br />
d = + − =<br />
CA<br />
d = 9.6 in. + 9.6 in. + 4.8 in. = 14.4 in.<br />
DA<br />
F BA = FBAλBA<br />
= ⎡ − + ⎤<br />
14.6 in. ⎣ i j ⎦<br />
11 9.6<br />
F ⎡ ⎛ ⎞ ⎛ ⎞<br />
= ⎤<br />
BA ⎢− ⎜ ⎟i<br />
+ ⎜ ⎟j<br />
⎥<br />
⎣ ⎝14.6 ⎠ ⎝14.6<br />
⎠ ⎦<br />
F FCA<br />
CA = FCAλCA<br />
= ⎡( 9.6 in. ) − ( 7.2 in. ) ⎤<br />
12.0 in. ⎣ j k ⎦<br />
4 3<br />
F ⎡ ⎛ ⎞ ⎛ ⎞<br />
= ⎤<br />
CA ⎢⎜ ⎟j<br />
− ⎜ ⎟k<br />
⎥<br />
⎣⎝5⎠ ⎝5⎠<br />
⎦<br />
F FDA<br />
DA = FDAλDA<br />
= ⎡( 9.6 in. ) + ( 9.6 in. ) + ( 4.8 in. ) ⎤<br />
14.4 in. ⎣ i j k ⎦<br />
2 2 1<br />
F ⎡ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
= ⎤<br />
DA ⎢⎜ ⎟i + ⎜ ⎟j + ⎜ ⎟k<br />
⎥<br />
⎣⎝3⎠ ⎝3⎠ ⎝3⎠<br />
⎦<br />
P =−P j<br />
At point A: Σ F = 0: F + F + F + P = 0<br />
BA CA DA<br />
i<br />
component:<br />
11 2<br />
− ⎛ ⎜ ⎞ FBA<br />
+ ⎛ ⎞ FDA<br />
= 0<br />
14.6<br />
⎟ ⎜<br />
3<br />
⎟<br />
⎝ ⎠ ⎝ ⎠<br />
(1)<br />
j<br />
component:<br />
⎛ 9.6 ⎞ ⎛4 ⎞ ⎛2<br />
⎞<br />
⎜ FBA FCA FDA<br />
P 0<br />
14.6<br />
⎟ + ⎜ + − =<br />
5<br />
⎟ ⎜<br />
3<br />
⎟<br />
⎝ ⎠ ⎝ ⎠ ⎝ ⎠<br />
(2)<br />
k component:<br />
3 1<br />
− ⎛ ⎜ ⎞ FCA<br />
+ ⎛ ⎞ FDA<br />
= 0<br />
5<br />
⎟ ⎜<br />
3<br />
⎟<br />
⎝ ⎠ ⎝ ⎠<br />
(3)<br />
continued<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
From Equation (1)<br />
⎛14.6 ⎞⎛2<br />
⎞<br />
FBA<br />
= ⎜ F<br />
11 ⎟⎜<br />
3 ⎟<br />
⎝ ⎠⎝ ⎠<br />
⎛14.6 ⎞⎛2<br />
⎞<br />
29.2 lb = ⎜<br />
11<br />
⎟⎜<br />
3<br />
⎟<br />
⎝ ⎠⎝ ⎠<br />
DA<br />
F DA<br />
or<br />
F =<br />
DA<br />
33lb<br />
<strong>Sol</strong>ving Eqn. (3) for F CA gives:<br />
F<br />
CA<br />
⎛5<br />
⎞<br />
= ⎜ F<br />
9 ⎟<br />
⎝ ⎠<br />
DA<br />
F CA<br />
⎛5<br />
⎞<br />
= ⎜<br />
9 ⎟<br />
⎝ ⎠<br />
( 33 lb)<br />
Substituting into Eqn. (2) for FBA, FDA,<br />
andF CA in terms of F DA gives:<br />
⎛ 9.6 ⎞ ⎛4 ⎞⎛5 ⎞ ⎛2<br />
⎞<br />
⎜ ( 29.2 lb) ( 33 lb) ( 33 lb)<br />
P 0<br />
14.6<br />
⎟ + ⎜ + − =<br />
5<br />
⎟⎜<br />
9<br />
⎟ ⎜<br />
3<br />
⎟<br />
⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠<br />
∴<br />
P = 55.9 lb "<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 106.<br />
See Problem 2.105 for the figure and the analysis leading to the linear algebraic Equations (1), (2), and<br />
(3) below.<br />
11 2<br />
− ⎛ ⎜ ⎞ ⎟FBA<br />
+ ⎛ ⎜ ⎞<br />
⎟FDA<br />
= 0<br />
(1)<br />
⎝14.6 ⎠ ⎝3<br />
⎠<br />
From Equation (1):<br />
⎛ 9.6 ⎞ ⎛4 ⎞ ⎛2<br />
⎞<br />
⎜ ⎟FBA + ⎜ ⎟FCA + ⎜ ⎟FDA<br />
− P = 0<br />
⎝14.6 ⎠ ⎝5 ⎠ ⎝3<br />
⎠<br />
3 1<br />
− ⎛ ⎜ ⎞ ⎟FCA<br />
+ ⎛ ⎜ ⎞<br />
⎟FDA<br />
= 0 (3)<br />
⎝5⎠ ⎝3⎠<br />
F<br />
BA<br />
⎛14.6 ⎞⎛2<br />
⎞<br />
= ⎜ ⎟⎜ ⎟ F<br />
⎝ 11 ⎠⎝3<br />
⎠<br />
⎛5<br />
⎞<br />
From Equation (3): FCA<br />
= ⎜ ⎟ FDA<br />
⎝9<br />
⎠<br />
Substituting into Equation (2) for F and F gives:<br />
BA<br />
⎛ 9.6 ⎞⎛14.6 ⎞⎛2 ⎞ ⎛4 ⎞⎛5 ⎞ ⎛2<br />
⎞<br />
⎜ ⎟⎜ ⎟⎜ ⎟FDA + ⎜ ⎟⎜ ⎟FDA + ⎜ ⎟FDA<br />
− P = 0<br />
⎝14.6 ⎠⎝ 11 ⎠⎝3 ⎠ ⎝5 ⎠⎝9 ⎠ ⎝3<br />
⎠<br />
Since<br />
P = 45 lb<br />
and<br />
and<br />
F BA<br />
F CA<br />
CA<br />
⎛838<br />
⎞<br />
or ⎜ ⎟F<br />
⎝495<br />
⎠<br />
DA<br />
DA<br />
= P<br />
⎛838<br />
⎞<br />
⎜ ⎟F DA = 45 lb<br />
⎝495<br />
⎠<br />
or F DA = 26.581 lb<br />
⎛14.6 ⎞⎛2<br />
⎞<br />
= ⎜ ⎟⎜ ⎟ ( 26.581 lb)<br />
⎝ 11 ⎠⎝3<br />
⎠<br />
⎛5<br />
⎞<br />
= ⎜ ⎟<br />
⎝9<br />
⎠<br />
( 26.581 lb)<br />
or<br />
or<br />
(2)<br />
F = 23.5 lb ⊳<br />
BA<br />
F = 14.77 lb ⊳<br />
CA<br />
and F = 26.6 lb ⊳<br />
DA<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 107.<br />
The force in each cable can be written as the product of the magnitude of<br />
the force and the unit vector along the cable. That is, with<br />
uuur<br />
AC = i − j + k<br />
( 18 m) ( 30 m) ( 5.4 m)<br />
( ) ( ) ( )<br />
2 2 2<br />
AC = 18 m + − 30 m + 5.4 m = 35.4 m<br />
uuur<br />
T AC TAC<br />
AC = Tλ<br />
AC = TAC<br />
= ⎡( 18 m) − ( 30 m) + ( 5.4 m)<br />
⎤<br />
AC 35.4 m<br />
⎣ i j k ⎦<br />
AC<br />
AC<br />
( 0.50847 0.84746 0.152542 )<br />
T = T i − j + k<br />
and<br />
uuur<br />
AB =− i − j + k<br />
( 6 m) ( 30 m) ( 7.5 m)<br />
( ) ( ) ( )<br />
2 2 2<br />
AB = − 6 m + − 30 m + 7.5 m = 31.5 m<br />
uuur<br />
T AB TAB<br />
AB = Tλ<br />
AB = TAB<br />
= ⎡−( 6 m) − ( 30 m) + ( 7.5 m)<br />
⎤<br />
AB 31.5 m<br />
⎣ i j k ⎦<br />
AB<br />
AB<br />
( 0.190476 0.95238 0.23810 )<br />
T = T − i − j + k<br />
uuur<br />
Finally AD =−( 6 m) −( 30 m) −( 22.2 m)<br />
i j k<br />
( ) ( ) ( )<br />
2 2 2<br />
AD = − 6 m + − 30 m + − 22.2 m = 37.8 m<br />
uuur<br />
T AD TAD<br />
AD = Tλ<br />
AD = TAD<br />
= ⎡−( 6 m) − ( 30 m) − ( 22.2 m)<br />
⎤<br />
AD 37.8 m<br />
⎣ i j k ⎦<br />
AD<br />
AD<br />
( 0.158730 0.79365 0.58730 )<br />
T = T − i − j − k<br />
continued<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
With P = Pj<br />
, at A:<br />
Σ F = 0: T + T + T + j = 0<br />
AB AC AD P<br />
Equating the factors of i, j, and k to zero, we obtain the linear algebraic<br />
equations:<br />
i : − 0.190476T + 0.50847T − 0.158730T<br />
= 0 (1)<br />
AB AC AD<br />
j : −0.95238T − 0.84746T − 0.79365T + P = 0 (2)<br />
AB AC AD<br />
k : 0.23810T + 0.152542T − 0.58730T<br />
= 0 (3)<br />
AB AC AD<br />
In Equations (1), (2) and (3), set T AB = 3.6 kN, and, using conventional<br />
methods for solving Linear Algebraic Equations (MATLAB or Maple,<br />
for example), we obtain:<br />
T AC =<br />
T AD =<br />
1.963 kN<br />
1.969 kN<br />
P = 6.66 kN "<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 108.<br />
Based on the results of Problem 2.107, particularly Equations (1), (2) and (3), we substitute T AC = 2.6 kN and<br />
solve the three resulting linear equations using conventional tools for solving Linear Algebraic Equations<br />
(MATLAB or Maple, for example), to obtain<br />
T AB =<br />
T AD =<br />
4.77 kN<br />
2.61 kN<br />
P = 8.81 kN !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 109.<br />
At A Σ F = 0<br />
Substituting for<br />
!!!"<br />
AB =− i − j + k<br />
( 6.5 ft) ( 8 ft) ( 2 ft)<br />
( ) ( ) ( )<br />
2 2 2<br />
AB = − 6.5 ft + − 8 ft + 2 ft = 10.5 ft<br />
T TAB<br />
AB = ⎡−( 6.5 ft) − ( 8 ft) + ( 2 ft)<br />
⎤<br />
10.5 ft ⎣ i j k ⎦<br />
T AB<br />
( 0.61905i 0.76190j 0.190476k<br />
)<br />
= − − +<br />
!!!"<br />
AC = i − j + k<br />
( 1ft) ( 8ft) ( 4ft)<br />
( ) ( ) ( )<br />
2 2 2<br />
AC = 1ft + − 8ft + 4ft = 9ft<br />
T TAC<br />
AC = ⎡( 1ft) − ( 8ft) + ( 4ft)<br />
⎤<br />
9ft⎣<br />
i j k ⎦<br />
( 0.111111 0.88889 0.44444 )<br />
= T i − j + k<br />
AC<br />
!!!"<br />
AD = i − j − k<br />
( 1.75 ft) ( 8 ft) ( 1 ft)<br />
( ) ( ) ( )<br />
2 2 2<br />
AD = 1.75 ft + − 8 ft + − 1 ft = 8.25 ft<br />
T TAD<br />
AD = ⎡( 1.75 ft) − ( 8 ft) − ( 1 ft)<br />
⎤<br />
8.25 ft ⎣ i j k ⎦<br />
T AD<br />
( 0.21212i 0.96970j 0.121212k<br />
)<br />
= − −<br />
Σ F = 0: − 0.61905T + 0.111111T + 0.21212T<br />
= 0<br />
(1)<br />
x AB AC AD<br />
Σ F = 0: −0.76190T − 0.88889T − 0.96970T + W = 0<br />
(2)<br />
y AB AC AD<br />
Σ F = 0: 0.190476T + 0.44444T − 0.121212T<br />
= 0<br />
(3)<br />
z AB AC AD<br />
W = 320 lb and <strong>Sol</strong>ving Equations (1), (2), (3) simultaneously yields:<br />
T = 86.2 lb !<br />
AB<br />
T = 27.7 lb !<br />
AC<br />
T = 237 lb !<br />
AD<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 110.<br />
See Problem 2.109 for the analysis leading to the linear algebraic Equations (1), (2), and (3) shown below.<br />
− 0.61905T + 0.111111T + 0.21212T<br />
= 0 (1)<br />
AB AC AD<br />
−0.76190T − 0.88889T − 0.96970T + W = 0 (2)<br />
AB AC AD<br />
0.190476T + 0.44444T − 0.121212T<br />
= 0 (3)<br />
AB AC AD<br />
Now substituting for T = 220 lb Gives:<br />
AD<br />
<strong>Sol</strong>ving Equations (4) and (6) simultaneously gives<br />
− 0.61905T<br />
+ 0.111111T<br />
+ 46.662 = 0<br />
(4)<br />
AB<br />
AC<br />
−0.76190T − 0.88889T − 213.33 + W = 0<br />
(5)<br />
AB<br />
AC<br />
0.190476T<br />
+ 0.44444T<br />
− 26.666 = 0<br />
(6)<br />
AB<br />
AC<br />
T = 79.992 lb and T = 25.716 lb<br />
AB<br />
Substituting into Equation (5) yields<br />
W = 297 lb ⊳<br />
AC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 111.<br />
Note that because the line of action of each of the cords passes through the vertex A of the cone, the cords all<br />
have the same length, and the unit vectors lying along the cords are parallel to the unit vectors lying along the<br />
generators of the cone.<br />
Thus, for example, the unit vector along BE is identical to the unit vector along the generator AB.<br />
Hence:<br />
It follows that:<br />
λ = λ =<br />
AB<br />
BE<br />
cos 45° i + 8j − sin 45°<br />
k<br />
65<br />
⎛cos 45° i + 8j − sin 45°<br />
k ⎞<br />
TBE = TBEλ<br />
BE = TBE<br />
⎜ ⎟<br />
⎝ 65 ⎠<br />
⎛cos30° i + 8j + sin 30°<br />
k ⎞<br />
TCF = TCFλ<br />
CF = TCF<br />
⎜ ⎟<br />
⎝ 65 ⎠<br />
At A: Σ F = 0: T + T + T + W + P = 0<br />
BE CF DG<br />
⎛− cos15° i + 8j − sin15°<br />
k ⎞<br />
TDG = TDGλ<br />
DG = TDG<br />
⎜ ⎟<br />
⎝<br />
65 ⎠<br />
Then, isolating the factors of i, j, and k, we obtain three algebraic equations:<br />
TBE TCF TDG<br />
i : cos 45°+ cos30°− cos15°+ P = 0<br />
65 65 65<br />
or T cos 45°+ T cos30°− T cos15°+ P 65 = 0<br />
(1)<br />
BE CF DG<br />
8 8 8<br />
j : TBE + TCF + TDG<br />
− W = 0<br />
65 65 65<br />
or<br />
65<br />
TBE + TCF + TDG<br />
− W = 0<br />
(2)<br />
8<br />
TBE TCF TDG<br />
k : − sin 45° + sin 30° − sin15° = 0<br />
65 65 65<br />
or − T sin 45° + T sin 30° − T sin15° = 0<br />
(3)<br />
With P = 0 and the tension in cord BE = 0.2 lb:<br />
BE CF DG<br />
<strong>Sol</strong>ving the resulting Equations (1), (2), and (3) using conventional methods in Linear Algebra (elimination,<br />
matrix methods or iteration – with MATLAB or Maple, for example), we obtain:<br />
T CF =<br />
T DG =<br />
0.669 lb<br />
0.746 lb<br />
W = 1.603 lb ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 112.<br />
See Problem 2.111 for the Figure and the analysis leading to the linear algebraic Equations (1), (2), and (3)<br />
below:<br />
i : T cos 45°+ T cos30°− T cos15°+ 65P<br />
= 0<br />
(1)<br />
BE CF DG<br />
65<br />
j : TBE + TCF + TDG<br />
− W = 0<br />
(2)<br />
8<br />
k : − T sin 45° + T sin 30° − T sin15° = 0 (3)<br />
BE CF DG<br />
With W = 1.6 lb , the range of values of P for which the cord CF is taut can found by solving Equations (1),<br />
(2), and (3) for the tension T CF as a function of P and requiring it to be positive ( > 0).<br />
<strong>Sol</strong>ving (1), (2), and (3) with unknown P, using conventional methods in Linear Algebra (elimination, matrix<br />
methods or iteration – with MATLAB or Maple, for example), we obtain:<br />
TCF<br />
( P )<br />
= − 1.729 + 0.668 lb<br />
Hence, for T CF > 0<br />
− 1.729P<br />
+ 0.668 > 0<br />
or<br />
P < 0.386 lb<br />
∴ φ ≤ P < 0.386 lb !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 113.<br />
( ) ( )<br />
2 2<br />
d = 400 mm + − 600 mm = 721.11 mm<br />
DA<br />
( ) ( ) ( )<br />
2 2 2<br />
d = − 200 mm + − 600 mm + 150 mm = 650 mm<br />
DB<br />
( ) ( ) ( )<br />
2 2 2<br />
d = − 200 mm + − 600 mm + − 150 mm = 650 mm<br />
DC<br />
T DA = TDAλDA<br />
T DA<br />
( 400 mm) i ( 600 mm)<br />
= ⎡ −<br />
721.11 mm ⎣<br />
= 0.55470i<br />
− 0.83205j<br />
T DA<br />
T DB = TDBλDB<br />
At point D Σ F =0: T + T + T + W 0<br />
i component:<br />
j component:<br />
k component:<br />
2<br />
Setting ( )( )<br />
DA DB DC =<br />
W = 16 kg 9.81 m/s = 156.96 N<br />
( )<br />
T DB<br />
And <strong>Sol</strong>ving Equations (1), (2), and (3) simultaneously:<br />
j ⎤<br />
⎦<br />
( 200 mm) ( 600 mm) + ( 150 mm)<br />
= ⎡− −<br />
⎤<br />
650 mm ⎣ i j k ⎦<br />
4 12 3<br />
= T ⎛ DB ⎜− i − j + k<br />
⎞<br />
13 13 13<br />
⎟<br />
⎝<br />
⎠<br />
T DC = TDCλDC<br />
T TDC<br />
DC = ⎡−( 200 mm) − ( 600 mm) − ( 150 mm)<br />
⎤<br />
650 mm ⎣ i j k ⎦<br />
⎛ 4 12 3 ⎞<br />
= T DC ⎜− i − j − k<br />
13 13 13<br />
⎟<br />
⎝<br />
⎠<br />
W = Wj<br />
4 4<br />
0.55470TDA − TDB − TDC<br />
= 0<br />
(1)<br />
13 13<br />
12 12<br />
−0.83205TDA − TDB − TDC<br />
+ W = 0<br />
(2)<br />
13 13<br />
3 3<br />
TDB<br />
− TDC<br />
= 0<br />
(3)<br />
13 13<br />
T = 62.9 N !<br />
DA<br />
T = 56.7 N !<br />
DB<br />
T = 56.7 N !<br />
DC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 114.<br />
( ) ( )<br />
2 2<br />
d = 400 mm + − 600 mm = 721.11 mm<br />
DA<br />
( ) ( ) ( )<br />
2 2 2<br />
d = − 200 mm + − 600 mm + 200 mm = 663.32 mm<br />
DB<br />
( ) ( ) ( )<br />
2 2 2<br />
d = − 200 mm + − 600 mm + − 200 mm = 663.32 mm<br />
DC<br />
T DA = TDAλDA<br />
T DA<br />
( 400 mm) i ( 600 mm)<br />
= ⎡ −<br />
721.11 mm ⎣<br />
T DA<br />
( 0.55470i<br />
0.83205j<br />
)<br />
= −<br />
T DB = TDBλDB<br />
T DB<br />
j ⎤<br />
⎦<br />
( 200 mm) ( 600 mm) + ( 200 mm)<br />
= ⎡− −<br />
⎤<br />
663.32 mm ⎣ i j k ⎦<br />
T DB<br />
( 0.30151i 0.90454 j + 0.30151k<br />
)<br />
= − −<br />
T DC = TDCλDC<br />
T DC<br />
( 200 mm) ( 600 mm) − ( 200 mm)<br />
= ⎡− −<br />
⎤<br />
663.32 mm ⎣ i j k ⎦<br />
T DC<br />
At point D Σ F =0: T + T + T + W 0<br />
DA DB DC =<br />
( 0.30151i 0.90454j 0.30151k<br />
)<br />
= − − −<br />
i component: 0.55470T − 0.30151T − 0.30151T<br />
= 0<br />
(1)<br />
DA DB DC<br />
j component: −0.83205T − 0.90454T − 0.90454T + W = 0<br />
(2)<br />
DA DB DC<br />
k component: 0.30151T<br />
− 0.30151T<br />
= 0<br />
(3)<br />
2<br />
Setting ( )( )<br />
W = 16 kg 9.81 m/s = 156.96 N<br />
And <strong>Sol</strong>ving Equations (1), (2), and (3) simultaneously:<br />
DB<br />
T = 62.9 N !<br />
DA<br />
T = 57.8 N !<br />
DB<br />
DC<br />
T = 57.8 N !<br />
DC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 115.<br />
From the solutions of 2.107 and 2.108:<br />
TAB<br />
TAC<br />
TAD<br />
= 0.5409P<br />
= 0.295P<br />
= 0.2959P<br />
Using<br />
P = 8 kN:<br />
T = 4.33 kN !<br />
AB<br />
T = 2.36 kN !<br />
AC<br />
T = 2.37 kN !<br />
AD<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 116.<br />
( ) ( ) ( )<br />
2 2 2<br />
d = 6m + 6m + 3m = 9m<br />
BA<br />
( ) ( ) ( )<br />
2 2 2<br />
d = − 10.5 m + − 6 m + − 8 m = 14.5 mm<br />
AC<br />
( ) ( ) ( )<br />
2 2 2<br />
d = − 6m + − 6m + 7m = 11mm<br />
AD<br />
( ) ( )<br />
2 2<br />
d = 6m + − 4.5m = 7.5m<br />
AE<br />
F<br />
F BA = FBAλBA<br />
=<br />
BA ⎡ ( 6m) + ( 6m) + ( 3m)<br />
⎤<br />
9m<br />
⎣ i j k ⎦<br />
AC = TACλAC<br />
2 2 1<br />
= F ⎛ BA ⎜ i + j + k<br />
⎞<br />
⎟<br />
⎝3 3 3 ⎠<br />
T AC<br />
T = ⎡−( 10.5 m) − ( 6 m) − ( 8 m)<br />
AD = TADλAD<br />
14.5 m<br />
⎣<br />
21 12 16<br />
= T ⎛ AC ⎜− i − j − k<br />
⎞<br />
⎟<br />
⎝ 29 29 29 ⎠<br />
T AD<br />
i j k ⎦<br />
⎤<br />
T = ⎡−( 6m) − ( 6m) + ( 7m)<br />
AE = WAEλAE<br />
11 m<br />
⎣<br />
i j k ⎤<br />
⎦<br />
⎛ 6 6 7 ⎞<br />
= T AD ⎜− i − j + k ⎟<br />
⎝ 11 11 11 ⎠<br />
W ⎡ ⎤<br />
7.5 m<br />
⎣<br />
j ⎦<br />
W = ( 6 m) i − ( 4.5 m)<br />
W<br />
O<br />
( 0.8i<br />
0.6j<br />
)<br />
= W −<br />
=−W<br />
At point A: Σ F =0: F + T + T + W + W 0<br />
BA AC AD AE O =<br />
j<br />
i component:<br />
2 21 6<br />
FBA − TAC − TAD<br />
+ 0.8W<br />
= 0<br />
(1)<br />
3 29 11<br />
continued<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
j component:<br />
2 12 6<br />
FBA − TAC − TAD<br />
− 1.6W<br />
= 0<br />
(2)<br />
3 29 11<br />
1 16 7<br />
k component: FBA − TAC + TAD<br />
= 0<br />
(3)<br />
3 29 11<br />
2<br />
Setting ( )( )<br />
W = 20 kg 9.81 m/s = 196.2 N<br />
And <strong>Sol</strong>ving Equations (1), (2), and (3) simultaneously:<br />
F = 1742 N ⊳<br />
BA<br />
T = 1517 N ⊳<br />
AC<br />
T = 403 N ⊳<br />
AD<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 117.<br />
Σ F x<br />
= 0:<br />
( )( ) ( )( ) ( )( )<br />
− T sin30° sin 50° + T sin30° cos 40° + T sin 30° cos60° = 0<br />
AD BD CD<br />
Dividing through by sin 30° and evaluating:<br />
− 0.76604T + 0.76604T + 0.5T<br />
= 0<br />
(1)<br />
AD BD CD<br />
Σ F y<br />
= 0:<br />
( ) ( ) ( )<br />
− T cos30° − T cos30° − T cos30° + 62 lb = 0<br />
AD BD CD<br />
or TAD + TBD + T CD = 71.591 lb<br />
(2)<br />
Σ F z<br />
= 0:<br />
<strong>Sol</strong>ving Equations (1), (2), and (3) simultaneously:<br />
T sin 30° cos50° + T sin 30° sin 40° − T sin 30° sin 60° = 0<br />
AD BD CD<br />
or 0.64279T + 0.64279T − 0.86603T<br />
= 0<br />
(3)<br />
AD BD CD<br />
T = 30.5 lb !<br />
AD<br />
T = 10.59 lb !<br />
BD<br />
T = 30.5 lb !<br />
CD<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 118.<br />
From the solutions to Problems 2.111 and 2.112, have<br />
Applying the method of elimination to obtain a desired result:<br />
Multiplying (2′)<br />
by sin 45° and adding the result to (3):<br />
T<br />
CF<br />
TBE + TCF + TDG<br />
= 0.2 65<br />
(2′)<br />
− T sin 45° + T sin 30° − T sin15° = 0 (3)<br />
BE CF DG<br />
T cos45°+ T cos30°− T cos15°− P 65 = 0 (1′<br />
)<br />
BE CF DG<br />
( ) T ( )<br />
sin 45°+ sin 30° + sin 45°− sin15° = 0.2 65 sin 45°<br />
DG<br />
or T = 0.94455 − 0.37137T<br />
Multiplying (2′)<br />
by sin 30° and subtracting (3) from the result:<br />
T<br />
BE<br />
( ) T ( )<br />
sin 30°+ sin 45° + sin 30°+ sin15° = 0.2 65 sin 30°<br />
DG<br />
or T = 0.66790 − 0.62863T<br />
(5)<br />
Substituting (4) and (5) into (1′)<br />
:<br />
BE<br />
1.29<strong>02</strong>8 −1.73205T<br />
− P 65 = 0<br />
∴ T DG is taut for<br />
DG<br />
P <<br />
1.29<strong>02</strong>8 lb<br />
65<br />
or 0 ≤ P ≤ 0.1600 lb!<br />
CF<br />
DG<br />
DG<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 119.<br />
( ) ( ) ( )<br />
2 2 2<br />
d = − 30 ft + 24 ft + 32 ft = 50 ft<br />
AB<br />
( ) ( ) ( )<br />
2 2 2<br />
d = − 30 ft + 20 ft + − 12 ft = 38 ft<br />
AC<br />
T TAB<br />
AB = TABλAB<br />
= ⎡− ( 30 ft) + ( 24 ft) + ( 32 ft)<br />
⎤<br />
50 ft<br />
⎣ i j k ⎦<br />
= − 0.6i + 0.48j + 0.64k<br />
T AB<br />
( )<br />
T TAC<br />
AC = TACλAC<br />
= ⎡− ( 30 ft) + ( 20 ft) − ( 12 ft)<br />
⎤<br />
38 ft<br />
⎣ i j k ⎦<br />
16 30<br />
N = Ni + Nj<br />
34 34<br />
W =−( 175 lb)<br />
j<br />
30 20 12<br />
= T ⎛ AC ⎜− i + j − k<br />
⎞<br />
⎟<br />
⎝ 38 38 38 ⎠<br />
At point A: Σ F =0: T + T + N + W 0<br />
i component:<br />
j component:<br />
AB AC =<br />
30 16<br />
−0.6TAB<br />
− TAC<br />
+ N = 0<br />
(1)<br />
38 34<br />
20 30<br />
0.48TAB<br />
+ TAC<br />
+ N − 175 lb = 0<br />
(2)<br />
38 34<br />
12<br />
k component: 0.64TAB<br />
− TAC<br />
= 0<br />
(3)<br />
38<br />
<strong>Sol</strong>ving Equations (1), (2), and (3) simultaneously:<br />
T = 30.9 lb ⊳<br />
AB<br />
T = 62.5 lb ⊳<br />
AC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 120.<br />
Refer to the solution of problem 2.119 and the resulting linear algebraic Equations (1), (2), (3). Include force<br />
P =− 45 lb k with other forces of Problem 2.119.<br />
( )<br />
Now at point A: Σ F =0: T + T + N + W + P 0<br />
AB AC =<br />
i component:<br />
j component:<br />
k component:<br />
30 16<br />
−0.6TAB<br />
− TAC<br />
+ N = 0<br />
38 34<br />
(1)<br />
20 30<br />
0.48TAB<br />
+ TAC<br />
+ N − 175 lb = 0<br />
38 34<br />
(2)<br />
12<br />
0.64TAB<br />
− TAC<br />
38<br />
− 45 lb = 0<br />
(3)<br />
<strong>Sol</strong>ving (1), (2), and (3) simultaneously:<br />
T = 81.3 lb ⊳<br />
AB<br />
T = 22.2 lb ⊳<br />
AC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 121.<br />
Note: BE shares the same unit vector as AB.<br />
Thus:<br />
( 25 mm) cos45° i + ( 200 mm) j − ( 25 mm)<br />
sin 45°<br />
k<br />
λBE<br />
= λAB<br />
=<br />
201.56 mm<br />
T TBE<br />
BE = TBEλBE<br />
= ⎡( 25 mm) cos45 ° + ( 200 mm) − ( 25 mm)<br />
sin 45°<br />
⎤<br />
201.56 mm ⎣<br />
i j k ⎦<br />
T TCF<br />
CF = TCFλCF<br />
= ⎡( 25 mm) cos30 ° + ( 200 mm) + ( 25 mm)<br />
sin 30°<br />
⎤<br />
201.56 mm ⎣<br />
i j k ⎦<br />
T TDG<br />
DG = TDGλDG<br />
= ⎡− ( 25 mm) cos15 ° + ( 200 mm) − ( 25 mm)<br />
sin15°<br />
⎤<br />
201.56 mm ⎣<br />
i j k ⎦<br />
W = −Wj ; P = Pk<br />
At point A: ΣF =0: TBE + TCE + TDG<br />
+ W + P =0<br />
i component: 0.087704T + 0.107415T − 0.119806T<br />
= 0<br />
(1)<br />
BE CF DG<br />
j component: 0.99226T + 0.99226T + 0.99226T − W = 0<br />
(2)<br />
BE CF DG<br />
k component: − 0.087704T + 0.062016T − 0.0321<strong>02</strong>T + P = 0<br />
(3)<br />
BE CF DG<br />
Setting W = 10.5 N and P = 0, and solving (1), (2), (3) simultaneously:<br />
T = 1.310 N !<br />
BE<br />
T = 4.38 N !<br />
CF<br />
T = 4.89 N !<br />
DG<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 122.<br />
See Problem 2.121 for the analysis leading to the linear algebraic Equations (1), (2), and (3) below:<br />
i component: 0.087704T + 0.107415T − 0.119806T<br />
= 0<br />
(1)<br />
BE CF DG<br />
j component: 0.99226 T + 0.99226 T + 0.99226 T − W = 0<br />
(2)<br />
BE CF DG<br />
k component: − 0.087704T + 0.062016T − 0.0321<strong>02</strong>T + P = 0<br />
(3)<br />
BE CF DG<br />
Setting W = 10.5 N and P = 0.5 N, and solving (1), (2), (3) simultaneously:<br />
T = 4.84 N !<br />
BE<br />
T = 1.157 N !<br />
CF<br />
T = 4.58 N !<br />
DG<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 123.<br />
At D ΣF = 0:<br />
Σ F x =<br />
Σ F z =<br />
0:<br />
0:<br />
uuur<br />
DA =− i + j + k<br />
( 8ft) ( 40ft) ( 10ft)<br />
( ) ( ) ( )<br />
2 2 2<br />
DA = − 8ft + 40ft + 10ft = 42ft<br />
T TADB<br />
DA = ⎡− ( 8ft) + ( 40ft) + ( 10ft)<br />
⎤<br />
42 ft<br />
⎣ i j k ⎦<br />
= T ADB − 0.190476i + 0.95238j + 0.23810k<br />
uuur<br />
DB = 3ft i + 36ft j − 8ft k<br />
( )<br />
( ) ( ) ( )<br />
( ) ( ) ( )<br />
2 2 2<br />
DB = 3ft + 36ft + − 8ft = 37ft<br />
T TADB<br />
DB = ⎡( 3ft) + ( 36ft) − ( 8ft)<br />
⎤<br />
37 ft<br />
⎣ i j k ⎦<br />
= T ADB 0.081081i + 0.97297j − 0.21622k<br />
uuur<br />
DC = a − 8ft i − 24ft j − 3ft k<br />
( )<br />
( ) ( ) ( )<br />
2<br />
( a 8ft) ( 24ft) ( 3ft)<br />
2 2<br />
DC = − + − + −<br />
( a )<br />
( a ) 2<br />
= − 8 + 585 ft<br />
TDC<br />
TDC<br />
= ⎡( a 8ft) ( 24ft) ( 3ft)<br />
⎤<br />
2 ⎣ − i − j − k ⎦<br />
− 8 + 585<br />
( a − 8)<br />
( a − ) 2 +<br />
− 0.190476TADB + 0.081081TADB + TDC<br />
= 0<br />
8 585<br />
3<br />
0.23810TADB − 0.21622TADB − TDC<br />
= 0<br />
− 8 + 585<br />
( a ) 2<br />
(1)<br />
(2)<br />
Dividing equation (1) by equation (2) gives<br />
( a − )<br />
8 0.190476 − 0.081081<br />
=<br />
−3 − 0.23810 + 0.21622<br />
or<br />
a = 23 ft<br />
Substituting into equation (1) for a = 23 ft and combining the coefficients for T ADB gives:<br />
Σ F x = 0: − 0.109395TADB<br />
+ 0.52705TDC<br />
= 0<br />
(3)<br />
continued<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
And writing Σ F = 0 gives:<br />
y<br />
1.92535T − 0.84327T − W = 0<br />
(4)<br />
ADB<br />
Substituting into equation (3) for T = 17 lb gives:<br />
DC<br />
DC<br />
( )<br />
− 0.109395 + 0.52705 17 lb = 0<br />
T ADB<br />
or<br />
T = 81.9 lb ⊳<br />
ADB<br />
Substituting into equation (4) for T = 17 lb and T = 81.9 lb gives:<br />
DC<br />
( ) ( )<br />
ADB<br />
1.92535 81.9 lb − 0.84327 17 lb − W = 0<br />
or<br />
W = 143.4 lb<br />
⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 124.<br />
See Problem 2.123 for the analysis leading to the linear<br />
algebraic Equations (3) and (4) below:<br />
− 0.109395T<br />
+ 0.52705T<br />
= 0<br />
(3)<br />
ADB<br />
DC<br />
1.92535T − 0.84327T − W = 0<br />
(4)<br />
ADB<br />
DC<br />
Substituting for W = 120 lb and solving equations (3) and (4) simultaneously yields<br />
T = 68.6 lb !<br />
ADB<br />
T = 14.23 lb !<br />
DC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 125.<br />
( ) ( ) ( )<br />
2 2 2<br />
d = − 2.7 m + 2.4 m + − 3.6 m = 5.1 m<br />
AB<br />
( ) ( )<br />
2 2<br />
d = 2.4 m + 1.8 m = 3 m<br />
AC<br />
( ) ( ) ( )<br />
2 2 2<br />
d = 1.2 m + 2.4 m + − 0.3 m = 2.7 m<br />
AD<br />
( ) ( ) ( )<br />
2 2 2<br />
d = − 2.4 m + 2.4 m + 1.2 m = 3.6 m<br />
AE<br />
T AB = TABλAB<br />
T AB<br />
( 2.7 m) ( 2.4 m) ( 3.6 m)<br />
= ⎡− + − ⎤<br />
5.1 m ⎣ i j k ⎦<br />
9 8 12<br />
= T ⎛ AB ⎜− i + j − k<br />
⎞<br />
17 17 17<br />
⎟<br />
⎝<br />
⎠<br />
T AC = TACλAC<br />
T<br />
T AC<br />
( 2.4 m) j ( 1.8 m)<br />
= ⎡ +<br />
3m<br />
⎣<br />
T AC<br />
( 0.8j<br />
0.6k<br />
)<br />
= +<br />
= 2T<br />
λ<br />
AD ADE AD<br />
T ADE<br />
k ⎤<br />
⎦<br />
2<br />
= ⎡( 1.2 m) + ( 2.4 m) − ( 0.3 m)<br />
⎤<br />
2.7 m<br />
⎣ i j k ⎦<br />
⎛ 8 16 2 ⎞<br />
= T ADE ⎜ i + j − k<br />
9 9 9<br />
⎟<br />
⎝<br />
⎠<br />
continued<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
T AE = TAEλAE<br />
T ADE<br />
( 2.4 m) ( 2.4 m) ( 1.2 m)<br />
= ⎡− + + ⎤<br />
3.6 m<br />
⎣ i j k ⎦<br />
⎛ 2 2 1 ⎞<br />
= T ADE ⎜− i + j + k<br />
3 3 3<br />
⎟<br />
⎝<br />
⎠<br />
W =−Wj<br />
At point A: ΣF = 0: T + T + T + T W = 0<br />
i component:<br />
j component:<br />
k component:<br />
Simplifying (1), (2), (3):<br />
AB AC AD AE +<br />
9 8 2<br />
− TAB + TADE − TADE<br />
= 0<br />
(1)<br />
17 9 3<br />
8 16 2<br />
TAB + 0.8 TAC + TADE + TADE<br />
− W = 0<br />
(2)<br />
17 9 3<br />
12 2 1<br />
− TAB + 0.6 TAC − TADE + TADE<br />
= 0<br />
(3)<br />
17 9 3<br />
− 81T<br />
+ 34T<br />
= 0<br />
(1) ′<br />
AB<br />
ADE<br />
72T + 122.4T + 374T = 153 W<br />
(2) ′<br />
AB AC ADE<br />
− 108T + 91.8T + 17T<br />
= 0<br />
(3) ′<br />
AB AC ADE<br />
Setting W = 1400 N and solving (1), (2), (3) simultaneously:<br />
T = 203 N "<br />
AB<br />
T = 149.6 N "<br />
AC<br />
T = 485 N "<br />
ADE<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 126.<br />
See Problem 2.125 for the analysis leading to the linear algebraic Equations ( 1 ′), ( 2 ′),<br />
and ( 3′ ) below:<br />
i component: 81T<br />
34T<br />
0<br />
− + = ( 1′ )<br />
AB<br />
j component: 72 T 122.4 T 37.4 T 153 W<br />
ADE<br />
+ + = ( 2′ )<br />
AB AC ADE<br />
k component: 108 T 91.8 T 17 T 0<br />
− + + = ( 3′ )<br />
AB AC ADE<br />
Setting T AB = 300 N and solving (1), (2), (3) simultaneously:<br />
(a)<br />
(b)<br />
(c)<br />
T = 221 N !<br />
AC<br />
T = 715 N !<br />
ADE<br />
W = 2060 N !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 127.<br />
Free-Body Diagrams of collars For both Problems 2.127 and 2.128:<br />
Here ( ) ( )<br />
( ) 2 2 2 2<br />
AB = x + y + z<br />
2 2 2 2<br />
1m = 0.40m + y + z<br />
or<br />
y<br />
2 2 2<br />
+ z = 0.84 m<br />
Thus, with y given, z is determined.<br />
Now<br />
uuur<br />
AB 1<br />
λ AB = = ( 0.40i − yj + zk)<br />
m = 0.4i − yk + zk<br />
AB 1m<br />
Where y and z are in units of meters, m.<br />
From the F.B. Diagram of collar A:<br />
Σ F = 0: N i + N k + Pj + T λ = 0<br />
Setting the jcoefficient to zero gives:<br />
With P = 680 N,<br />
x z AB AB<br />
P − yT AB =<br />
0<br />
T AB<br />
=<br />
680 N<br />
y<br />
Now, from the free body diagram of collar B:<br />
Σ F = 0: N i + N j + Qk − T λ = 0<br />
x y AB AB<br />
continued<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Setting the k coefficient to zero gives:<br />
Q − TABz<br />
=<br />
And using the above result for T AB we have<br />
680 N<br />
Q = TABz = z<br />
y<br />
0<br />
Then, from the specifications of the problem, y = 300 mm = 0.3 m<br />
and<br />
z<br />
2 2<br />
∴ z =<br />
( ) 2<br />
= 0.84 m − 0.3 m<br />
0.866 m<br />
(a)<br />
or<br />
and<br />
680 N<br />
T AB = = 2266.7 N<br />
0.30<br />
(b) Q = 2266.7( 0.866)<br />
= 1963.2 N<br />
or<br />
T = 2.27 kN !<br />
AB<br />
Q = 1.963 kN !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 128.<br />
From the analysis of Problem 2.127, particularly the results:<br />
y<br />
2 2 2<br />
+ z = 0.84 m<br />
T AB<br />
Q<br />
=<br />
=<br />
680 N<br />
y<br />
680 N<br />
z<br />
y<br />
With y = 550 mm = 0.55 m, we obtain:<br />
and<br />
2 2<br />
( ) 2<br />
z = 0.84 m − 0.55 m<br />
∴ z = 0.73314 m<br />
(a)<br />
or<br />
and<br />
680 N<br />
T AB = = 1236.36 N<br />
0.55<br />
T = 1.236 kN !<br />
AB<br />
(b) Q = 1236.36( 0.73314)<br />
N = 906 N<br />
or<br />
Q = 0.906 kN !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 129.<br />
Using the triangle rule and the Law of Sines<br />
(a)<br />
Have:<br />
20 lb 14 lb<br />
sinα = sin 30°<br />
sinα = 0.71428<br />
(b) β = 180° − ( 30° + 45.6°<br />
)<br />
α = 45.6°⊳<br />
= 104.4°<br />
Then:<br />
R 14 lb<br />
=<br />
sin104.4° sin 30°<br />
R =<br />
27.1 lb ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 130.<br />
We compute the following distances:<br />
500 N Force:<br />
( ) ( )<br />
2 2<br />
OA = 70 + 240 = 250 mm<br />
( ) ( )<br />
2 2<br />
OB = 210 + 200 = 290 mm<br />
( ) ( )<br />
2 2<br />
OC = 120 + 225 = 255 mm<br />
F x<br />
F y<br />
⎛ 70 ⎞<br />
=−500 N⎜ 250<br />
⎟<br />
⎝ ⎠<br />
⎛240<br />
⎞<br />
=+ 500 N⎜ 250<br />
⎟<br />
⎝ ⎠<br />
F =− 140.0 N !<br />
x<br />
F = 480 N !<br />
y<br />
435 N Force:<br />
510 N Force:<br />
F x<br />
F y<br />
F x<br />
F y<br />
⎛210<br />
⎞<br />
=+ 435 N⎜ 290<br />
⎟<br />
⎝ ⎠<br />
⎛200<br />
⎞<br />
=+ 435 N⎜ 290<br />
⎟<br />
⎝ ⎠<br />
⎛120<br />
⎞<br />
=+ 510 N⎜ 255<br />
⎟<br />
⎝ ⎠<br />
⎛225<br />
⎞<br />
=−510 N⎜ 255<br />
⎟<br />
⎝ ⎠<br />
F = 315 N !<br />
x<br />
F = 300 N !<br />
y<br />
F = 240 N !<br />
x<br />
F =− 450 N !<br />
y<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 131.<br />
Note that the force exerted by BD on the pole is directed along BD, and the component of P along AC<br />
is 450 N.<br />
Then:<br />
(a)<br />
450 N<br />
P = = 549.3 N<br />
cos35°<br />
P = 549 N !<br />
(b) ( )<br />
P = 315 N !<br />
x<br />
P = 450 N tan 35°<br />
x<br />
= 315.1 N<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 132.<br />
Free-Body Diagram<br />
Force Triangle<br />
Law of Sines:<br />
TAC<br />
TBC<br />
5 kN<br />
= =<br />
sin115° sin 5° sin 60°<br />
(a)<br />
5 kN<br />
T AC = sin115 ° = 5.23 kN<br />
sin 60°<br />
T = 5.23 kN !<br />
AC<br />
(b)<br />
5 kN<br />
T BC = sin 5 ° = 0.503 kN<br />
sin 60°<br />
T = 0.503 kN !<br />
BC<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 133.<br />
Free-Body Diagram<br />
First, consider the sum of forces in the x-direction because there is only one unknown force:<br />
or<br />
Now<br />
or<br />
( ) ( )<br />
Σ F = 0: T cos32° − cos42° − 20 kN cos 42° = 0<br />
x<br />
ACB<br />
0.104903T ACB = 14.8629 kN<br />
T ACB = 141.682 kN<br />
( ) ( )<br />
Σ F = 0: T sin 42°− sin 32° + 20 kN sin 42°− W = 0<br />
y<br />
ACB<br />
( )( ) ( )( )<br />
141.682 kN 0.139211 + 20 kN 0.66913 − W = 0<br />
(b)<br />
T = 141.7 kN !<br />
(a)<br />
ACB<br />
W = 33.1 kN !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 134.<br />
Free-Body Diagram: Pulley A<br />
Σ F = 0: 2Psin 25° − Pcosα<br />
= 0<br />
x<br />
and<br />
cosα<br />
= 0.8452 or α = ± 32.3°<br />
For α =+ 32.3°<br />
Σ F = 0: 2Pcos 25°+ Psin 32.3°− 350 lb = 0<br />
y<br />
or<br />
P = 149.1 lb 32.3° ⊳<br />
For α =− 32.3°<br />
Σ F = 0: 2Pcos 25° + Psin − 32.3° − 350 lb = 0<br />
y<br />
or<br />
P = 274 lb 32.3° ⊳<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 135.<br />
(a) F = Fsin 30° sin 50° = 220.6 N (Given)<br />
x<br />
F<br />
220.6 N<br />
= = 575.95 N<br />
sin30 ° sin50°<br />
F = 576 N !<br />
(b)<br />
Fx<br />
220.6<br />
cosθ x = = = 0.383<strong>02</strong><br />
F 575.95<br />
θ = 67.5°!<br />
x<br />
Fy<br />
= Fcos30° = 498.79 N<br />
Fy<br />
498.79<br />
cosθ y = = = 0.86605<br />
F 575.95<br />
θ = 30.0°!<br />
y<br />
Fz<br />
=− Fsin 30° cos50°<br />
=− ( 575.95 N)<br />
sin 30° cos50°<br />
=− 185.107 N<br />
Fz<br />
−185.107<br />
cosθ<br />
z = = = − 0.32139<br />
F 575.95<br />
θ = 108.7°!<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 136.<br />
(a) F Fcosθ<br />
( )<br />
Then:<br />
z<br />
= = 600 lb cos136.8°<br />
z<br />
=− 437.38 lb<br />
F =− 437 lb !<br />
2 2 2 2<br />
= x + y + z<br />
F F F F<br />
z<br />
2 2 2<br />
2<br />
F y<br />
So: ( 600 lb) = ( 200 lb) + ( ) + ( − 437.38 lb)<br />
2 2 2<br />
Hence: F =− ( 600 lb) −( 200 lb) −( − 437.38 lb)<br />
y<br />
=− 358.75 lb<br />
F =− 359 lb !<br />
y<br />
(b)<br />
Fx<br />
200<br />
cosθ x = = = 0.33333<br />
θ x = 70.5°!<br />
F 600<br />
Fy<br />
−358.75<br />
cosθ<br />
y = = = − 0.59792 θ y = 126.7°!<br />
F 600<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 137.<br />
( 500 lb)[ cos30 sin15 sin 30 cos30 cos15 ]<br />
( 500 lb)[ 0.2241i 0.50j 0.8365k<br />
]<br />
( 112.05 lb) i ( 250 lb) j ( 418.25 lb)<br />
k<br />
( 600 lb)[ cos 40 cos 20 sin 40 cos40 sin 20 ]<br />
( 600 lb)[ 0.71985i 0.64278j 0.26201k<br />
]<br />
( 431.91 lb) i ( 385.67 lb) j ( 157.206 lb)<br />
k<br />
( 319.86 lb) ( 635.67 lb) ( 261.04 lb)<br />
P = − ° ° i + ° j + ° ° k<br />
= − + +<br />
=− + +<br />
Q = ° ° i + ° j − ° ° k<br />
= + −<br />
= + −<br />
R = P + Q = i + j + k<br />
( ) ( ) ( )<br />
2 2 2<br />
R = 319.86 lb + 635.67 lb + 261.04 lb = 757.98 lb<br />
R = 758 lb !<br />
Rx<br />
319.86 lb<br />
cosθ x = = = 0.42199<br />
R 757.98 lb<br />
θ = 65.0°!<br />
Ry<br />
635.67 lb<br />
cosθ y = = = 0.83864<br />
R 757.98 lb<br />
θ = 33.0°!<br />
Rz<br />
261.04 lb<br />
cosθ z = = = 0.34439<br />
R 757.98 lb<br />
θ = 69.9°!<br />
x<br />
y<br />
z<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 138.<br />
Equating to zero the coefficients of i, j, k:<br />
The forces applied at A are:<br />
TAB , TAC, TAD<br />
and P<br />
where P = Pj . To express the other forces in terms of the unit vectors<br />
i, j, k, we write<br />
uuur<br />
AB =− ( 0.72 m) i + ( 1.2 m) j −( 0.54 m ) k,<br />
AB = 1.5 m<br />
uuur<br />
AC = ( 1.2 m) j + ( 0.64 m ) k,<br />
AC = 1.36 m<br />
uuur<br />
AD = ( 0.8 m) i + ( 1.2 m) j − ( 0.54 m ) k,<br />
AD = 1.54 m<br />
uuur<br />
and TAB = TABλ<br />
AB = T AB<br />
AB = ( − 0.48i + 0.8j − 0.36k)<br />
TAB<br />
AB<br />
uuur<br />
TAC = TACλ<br />
AC = T AC<br />
AC = ( 0.88235j + 0.47059k)<br />
TAC<br />
AC<br />
uuur<br />
TAD = TADλ<br />
AD = T AD<br />
AD = ( 0.51948i + 0.77922j − 0.35065k)<br />
TAD<br />
AD<br />
Equilibrium Condition with W =−Wj<br />
Σ F = 0: T + T + T − Wj<br />
= 0<br />
AB AC AD<br />
Substituting the expressions obtained for TAB, TAC, and TADand<br />
factoring i, j, and k:<br />
( − 0.48TAB + 0.51948TAD ) i + ( 0.8TAB + 0.88235TAC + 0.77922TAD<br />
−W)<br />
+ ( − 0.36T + 0.47059T − 0.35065T<br />
) k = 0<br />
AB AC AD<br />
− 0.48T<br />
+ 0.51948T<br />
= 0<br />
AB<br />
AD<br />
0.8T + 0.88235T + 0.77922T − W = 0<br />
AB AC AD<br />
− 0.36T + 0.47059T − 0.35065T<br />
= 0<br />
AB AC AD<br />
Substituting T AB = 3 kN in Equations (1), (2) and (3) and solving the resulting set of equations, using<br />
conventional algorithms for solving linear algebraic equations, gives<br />
T AC =<br />
T AD =<br />
4.3605 kN<br />
2.7720 kN<br />
W = 8.41 kN ⊳<br />
j<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 139.<br />
The (vector) force in each cable can be written as the product of the<br />
(scalar) force and the unit vector along the cable. That is, with<br />
uuur<br />
AB = i − j+<br />
k<br />
( 32 in. ) ( 48 in. ) ( 36 in. )<br />
( ) ( ) ( )<br />
2 2 2<br />
AB = − 32 in. + − 48 in. + 36 in. = 68 in.<br />
uuur<br />
T AB TAB<br />
AB = Tλ<br />
AB = TAB<br />
= ⎡−( 32 in. ) − ( 48 in. ) + ( 36 in. ) ⎤<br />
AB 68 in.<br />
⎣ i j k ⎦<br />
AB<br />
AB<br />
( 0.47059 0.70588 0.52941 )<br />
T = T − i − j + k<br />
uuur<br />
and AC = ( 45 in. ) − ( 48 in. ) + ( 36 in. )<br />
i j k<br />
( ) ( ) ( )<br />
2 2 2<br />
AC = 45 in. + − 48 in. + 36 in. = 75 in.<br />
uuur<br />
T AC TAC<br />
AC = Tλ<br />
AC = TAC<br />
= ⎡( 45 in. ) − ( 48 in. ) + ( 36 in. ) ⎤<br />
AC 75 in.<br />
⎣ i j k ⎦<br />
AC<br />
AC<br />
( 0.60 0.64 0.48 )<br />
T = T i − j + k<br />
uuur<br />
Finally, AD = ( 25 in. ) − ( 48 in. ) − ( 36 in. )<br />
i j k<br />
( ) ( ) ( )<br />
2 2 2<br />
AD = 25 in. + − 48 in. + − 36 in. = 65 in.<br />
continued<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
uuur<br />
T AD TAD<br />
AD = Tλ<br />
AD = TAD<br />
= ⎡( 25 in. ) − ( 48 in. ) − ( 36 in. ) ⎤<br />
AD 65 in.<br />
⎣ i j k ⎦<br />
AD<br />
AD<br />
With W = Wj , at A we have:<br />
( 0.38461 0.73846 0.55385 )<br />
T = T i − j − k<br />
Σ F = 0: T + T + T + j = 0<br />
AB AC AD W<br />
Equating the factors of i, j, and k to zero, we obtain the linear algebraic equations:<br />
i : − 0.47059T + 0.60T − 0.38461T<br />
= 0<br />
(1)<br />
AB AC AD<br />
j : −0.70588T − 0.64T − 0.73846T + W = 0<br />
(2)<br />
AB AC AD<br />
k : 0.52941T + 0.48T − 0.55385T<br />
= 0<br />
(3)<br />
AB AC AD<br />
In Equations (1), (2) and (3), set T AD = 120 lb, and, using conventional methods for solving Linear Algebraic<br />
Equations (MATLAB or Maple, for example), we obtain:<br />
T AB =<br />
T AC =<br />
32.6 lb<br />
1<strong>02</strong>.5 lb<br />
W = 177.2 lb "<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
Chapter 2, <strong>Sol</strong>ution 140.<br />
The (vector) force in each cable can be written as the product of the<br />
(scalar) force and the unit vector along the cable. That is, with<br />
uuur<br />
AB =− i + j − k<br />
( 0.48 m) ( 0.72 m) ( 0.16 m)<br />
( ) ( ) ( )<br />
2 2 2<br />
AB = − 0.48 m + 0.72 m + − 0.16 m = 0.88 m<br />
uuur<br />
T AB TAB<br />
AB = Tλ<br />
AB = TAB<br />
= ⎡− ( 0.48 m) + ( 0.72 m) − ( 0.16 m)<br />
⎤<br />
AB 0.88 m<br />
⎣ i j k ⎦<br />
AB<br />
AB<br />
( 0.54545 0.81818 0.181818 )<br />
T = T − i + j − k<br />
and<br />
uuur<br />
AC = i + j − k<br />
( 0.24 m) ( 0.72 m) ( 0.13 m)<br />
( ) ( ) ( )<br />
2 2 2<br />
AC = 0.24 m + 0.72 m − 0.13 m = 0.77 m<br />
uuur<br />
T AC TAC<br />
AC = Tλ<br />
AC = TAC<br />
= ⎡( 0.24 m) + ( 0.72 m) − ( 0.13 m)<br />
⎤<br />
AC 0.77 m<br />
⎣ i j k ⎦<br />
AC<br />
AC<br />
( 0.31169 0.93506 0.16883 )<br />
T = T i + j − k<br />
At A: Σ F = 0: T + T + P + Q + W = 0<br />
AB<br />
AC<br />
Noting that T AB = T AC because of the ring A, we equate the factors of<br />
i, j,andk to zero to obtain the linear algebraic equations:<br />
( )<br />
i : − 0.54545 + 0.31169 T + P = 0<br />
or P = 0.23376T<br />
( )<br />
j : 0.81818 + 0.93506 T − W = 0<br />
continued<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.
COSMOS: Complete Online <strong>Sol</strong>utions Manual Organization System<br />
With W = 1200 N:<br />
or W = 1.75324T<br />
( )<br />
k : −0.181818 − 0.16883 T + Q = 0<br />
or Q = 0.35065T<br />
1200 N<br />
T = = 684.45 N<br />
1.75324<br />
P = 160.0 N !<br />
Q = 240 N !<br />
Vector Mechanics for Engineers: Statics and Dynamics, 8/e, Ferdinand P. Beer, E. Russell Johnston, Jr.,<br />
Elliot R. Eisenberg, William E. Clausen, David Mazurek, Phillip J. Cornwell<br />
© 2007 The McGraw-Hill Companies.