
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2.1. Úvod<br />
Inovace výuky předmětu Robotika v lékařství<br />
KINEMATICKÉ ŘETĚZCE<br />
Každý pohybový mechanismus je vytvořen z určitého počtu dílů – členů, které jsou mezi<br />
sebou spojeny kinematickými <strong>dvojice</strong>mi. Volba druhu kinematických dvojic a členů závisí od<br />
požadavků na celý mechanismus a jeho uzlů.<br />
Základní členy, které se používají, jsou:<br />
1. člen jednoduchý<br />
2. člen dvojnásobný-binární<br />
3. člen vícenásobný (trojnásobný,…)<br />
Z těchto členů se postupným skládáním, podle určitých zásad, vytváří kinematické schéma<br />
mechanismu, neboli kinematický řetězec. Kinematické řetězce dělíme podle různých hledisek<br />
na:<br />
− otevřené, uzavřené a smíšené,<br />
− jednoduché a složené,<br />
− rovinné, sférické a prostorové.<br />
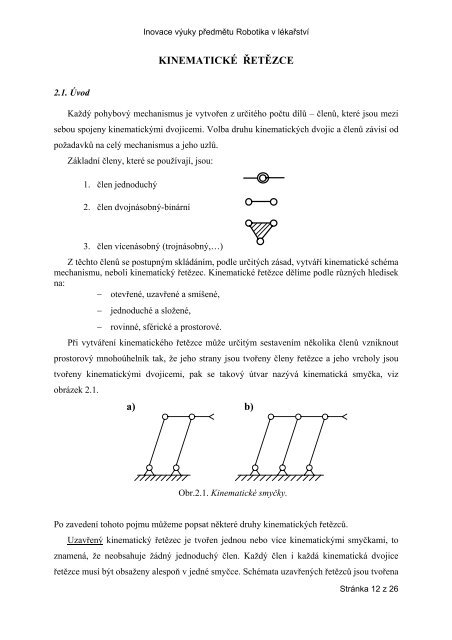
Při vytváření kinematického řetězce může určitým sestavením několika členů vzniknout<br />
prostorový mnohoúhelník tak, že jeho strany jsou tvořeny členy řetězce a jeho vrcholy jsou<br />
tvořeny kinematickými <strong>dvojice</strong>mi, pak se takový útvar nazývá kinematická smyčka, viz<br />
obrázek 2.1.<br />
a) b)<br />
Obr.2.1. Kinematické smyčky.<br />
Po zavedení tohoto pojmu můžeme popsat některé druhy kinematických řetězců.<br />
Uzavřený kinematický řetězec je tvořen jednou nebo více kinematickými smyčkami, to<br />
znamená, že neobsahuje žádný jednoduchý člen. Každý člen i každá kinematická <strong>dvojice</strong><br />
řetězce musí být obsaženy alespoň v jedné smyčce. Schémata uzavřených řetězců jsou tvořena<br />
Stránka 12 z 26