Veza naprezanja i deformacija
Veza naprezanja i deformacija
Veza naprezanja i deformacija

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4.3 Heksagonalna simetrija (uslojeni materijal)<br />
<strong>Veza</strong> izmeñu <strong>naprezanja</strong> i <strong>deformacija</strong> - 5 -<br />
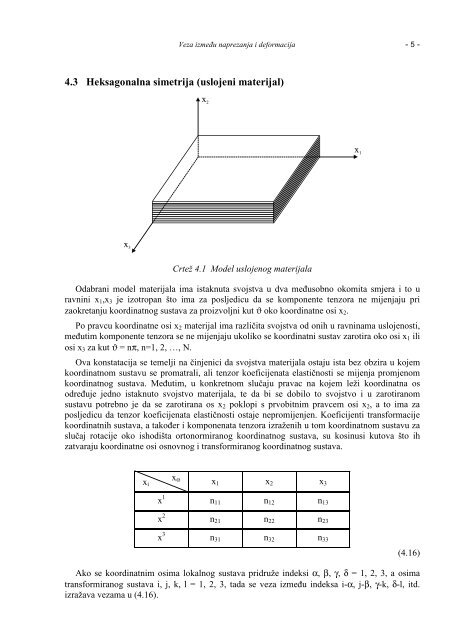
Crtež 4.1 Model uslojenog materijala<br />
Odabrani model materijala ima istaknuta svojstva u dva meñusobno okomita smjera i to u<br />
ravnini x1,x3 je izotropan što ima za posljedicu da se komponente tenzora ne mijenjaju pri<br />
zaokretanju koordinatnog sustava za proizvoljni kut ϑ oko koordinatne osi x2.<br />
Po pravcu koordinatne osi x2 materijal ima različita svojstva od onih u ravninama uslojenosti,<br />
meñutim komponente tenzora se ne mijenjaju ukoliko se koordinatni sustav zarotira oko osi x1 ili<br />
osi x3 za kut ϑ = nπ, n=1, 2, …, N.<br />
Ova konstatacija se temelji na činjenici da svojstva materijala ostaju ista bez obzira u kojem<br />
koordinatnom sustavu se promatrali, ali tenzor koeficijenata elastičnosti se mijenja promjenom<br />
koordinatnog sustava. Meñutim, u konkretnom slučaju pravac na kojem leži koordinatna os<br />
odreñuje jedno istaknuto svojstvo materijala, te da bi se dobilo to svojstvo i u zarotiranom<br />
sustavu potrebno je da se zarotirana os x2 poklopi s prvobitnim pravcem osi x2, a to ima za<br />
posljedicu da tenzor koeficijenata elastičnosti ostaje nepromijenjen. Koeficijenti transformacije<br />
koordinatnih sustava, a takoñer i komponenata tenzora izraženih u tom koordinatnom sustavu za<br />
slučaj rotacije oko ishodišta ortonormiranog koordinatnog sustava, su kosinusi kutova što ih<br />
zatvaraju koordinatne osi osnovnog i transformiranog koordinatnog sustava.<br />
xi xα x1 x2 x3<br />
x 1 n11 n12 n13<br />
x 2 n21 n22 n23<br />
x 3 n31 n32 n33<br />
(4.16)<br />
Ako se koordinatnim osima lokalnog sustava pridruže indeksi α, β, γ, δ = 1, 2, 3, a osima<br />
transformiranog sustava i, j, k, l = 1, 2, 3, tada se veza izmeñu indeksa i-α, j-β, γ-k, δ-l, itd.<br />
izražava vezama u (4.16).