Inženýrské základy MKP
Inženýrské základy MKP
Inženýrské základy MKP
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Inženýrské základy <strong>MKP</strong>Prof. Ing. Petr Horyl, CSc
P.Horyl: Inženýrské základy <strong>MKP</strong>1.0 Úvodní informace1.1.Vznik metody a oblast použitíMetoda vznikla v období kolem roku 1956 ve výzkumném ústavu aeronautické akosmické mechaniky v Ohiu, USA (Wright Paterson Air Force Base). Výzkumný tým byl vedenprof. R.W. Cloughem a spolupracovali zejména R.L. Melosh, H.C. Martin, J.L. Tocher a další.Výzkum a vývoj uvedené numerické metody vyvolal striktní požadavek "měsíčního" programuApollo v oblasti vývoje a konstrukce nosných raket. V daném čase a při známém objemu financí(3 miliardy ) se po rozboru zjistilo, že se pomocí experimentu nedá úkol splnit. Zbyla jediná cestaa sice vývoj takové numerické metody, která by výpočty potřebné pro projekty nových typů raketa dalších systémů projektu Apollo zvládla. Výsledky výzkumu byly dále intenzívně využívány nauvedené vojenské základně při projektech letadel, ponorek, raket všech typů, atd. Tato skutečnostzpůsobila utajení detailů metody tak, že programy a teoretické články ležely nejméně deset rokůve vojenských sejfech. První konference v Ohiu (1965 a1968) uváděly jen kusé informace. Dalšívývoj byl pak často poznamenán četnými duplicitami v odvození základních "nástrojů" metody(uvádí se, že deskový trojúhelníkový prvek odvodilo na sobě nezávisle aspoň 7 autorů). Jezajímavé, že inženýři s metodou dlouhé roky úspěšně počítali, než matematikové dokázalikonvergenci metody a vlastně posvětili desetileté výpočtářské úspěchy. V civilním sektoru senejbouřlivěji metoda konečných prvků (<strong>MKP</strong>) rozvíjela v letech 1965-1975. Prvnímpropagátorem a neochvějným zastáncem metody byl v ČSFR prof. V. Kolář, DrSc. z Brna, kterýtaké dosáhl značného mezinárodního uznání za programy řady NE. Pomocí <strong>MKP</strong> se dnes řešícelá řada úloh, jejichž realizace nebyla dosud možná a to nejen v oblasti mechaniky spojitýchtěles či soustav. Svou obecnou matematickou formulací umožňuje <strong>MKP</strong> řešit problém:mechaniky hornin, proudění kapalin a plynů, šíření tepla a záření, stacionárních a nestacionárníchelektromagnetických polí atd. Dokonce jsou známy pokusy o řešení sociologických úloh amodelování ekonomických problémů. O <strong>MKP</strong> má smysl hovořit pouze v souvislosti s nasazenímna číslicových počítačích - směle se dá říci, že metoda je produktem doby moderních počítačů. Vsoučasné době jsou to pro zajímavost vědecko-technické výpočty meteorologů, které majínejvětší požadavky na velikost a rychlost počítačů tak, aby předpověď počasí pro celouzeměkouli byla vypočítána do dvou hodin po shromáždění naměřených dat.1.2 Základní charakteristika metody<strong>MKP</strong> je numerická metoda pro získání přibližného řešení široké třídy inženýrskýchúloh. Součástí výpočtu má býti vždy odhad chyb řešení. Větší část konkrétních inženýrskýchproblémů není analyticky řešitelná, jsou to jen velmi jednoduché případy. Bez užití moderníchmetod se dosud při řešení úloh praxe postupuje tak, že řešený mechanický systém se výraznězjednodušší. Obvykle jde o takové zjednodušení, aby výsledky mohly být porovnávány seznámými řešeními uvedenými v tabulkách, katalozích atd.Používání <strong>MKP</strong> se rozšířilo v praxi spolu se vzrůstajícími počty 16ti bitových počítačů.Podobně jako u metody sítí dostáváme řešení přibližných hodnot neznámých veličin pomocí-- 2
P.Horyl: Inženýrské základy <strong>MKP</strong>konečného počtu neznámých parametrů. Postup, při němž se vybere jistý počet těchto parametrů,se nazývá diskretizace. Těleso (příp. soustava těles) se nahrazuje odpovídající soustavou menšíchčástí (prvků). Namísto řešení problému celého tělesa je problém formulován pro jeho jednotlivéčásti, v nichž jsou neznámé fce (např. deformace) přibližně popsány jen malým počtemparametrů ve zvolených bodech (uzlech). Dále se systematicky "zkompletuje" řešení pro celétěleso.V současnosti je <strong>MKP</strong> široce a podrobně rozpracovávaný vědní obor obsahující tytočásti:a) teoretická- formulace variačních principů, odvozování vztahů pro různétypy prvků atd.b) matematická - problematika vhodných numerických metod, výběr algoritmů,důkazy existence a konvergence řešení, odhad chyby řešeníatd.c) počítačová - 1) preprocessing - generování vstupních dat, grafickézobrazení členění, vstupní data, okrajové podmínky, zatížení,opravy a úpravy dat atd.2) processing - výpočet matic prvků, sestavení matic celéhosystému, sestavení maticových rovnic a jejich řešení atd.3) postprocessing - výpočty závislých parametrů, výstupnísoubory, grafické znázornění výsledků, výstupy výsledků naperiferie atd.d) inženýrsko problémová - využití možnosti <strong>MKP</strong> pro konkrétní inž. úlohy t.j. dělenítělesa na prvky, výběr typu prvku, výběr vhodného prvku prodanou úlohu, zadání potřebných vstupních údajů, volba foremvýstupů atd.<strong>MKP</strong> umožňuje řešit kvalitativně nové úlohy (jak rozsahem, tak obsahem). Dnes jsouvyvinuty stovky typů konečných prvků a na světě existují desítky celosvětově známýchprogramových systémů (ADINA, ANSYS, APPLE-SAP, ASAS, ASKA, BEASY, COSMOS,CASTEM, DIAL, MARC, MSC/NASTRAN, PAFEC, SAP7, SYSTUS, SYSNOISE, TITUS,TPS10...).Zahraniční:1.3 Základní literaturaZienkiewicz,O.C.: The Finite Element Method in Engineering Science, Mc Graw Hill,London 1971, 1977 (ruský a polský překlad)Przemieniecki, J.S.: Theory of Matrix Structural Analysis, Mc Graw Hill, NewYork 1968Bathe,K.J.-Wilson,E.L.: Numerical Methods in Finite Analysis Prentice Hall, EnglewoodCliffs, N.J. 1976, (ruský překlad)-- 3
P.Horyl: Inženýrské základy <strong>MKP</strong>Cook,R.D.-Malkus, D. S.-Plesha M.E.-Witt R. J.: Concepts and Applications of Finite ElementAnalysis, John Wiley & Sons, Inc. 2002, 4th editions, p. 7019, ISBN 0-471-35605-0Česká:V. Kolář, J. Kratochvíl, F. Leitner, A. Ženíšek:Výpočet plošných a prostorových konstrukcí metodou konečných prvků, SNTL,Praha 1979Z. Bittnar, P. Řeřicha: Metoda konečných prvků v dynamice konstrukcí, SNTL, Praha 1981M. Apetauer, V. Stejskal, J. Baněček: Výpočtové metody ve stavbě motorovýchvozidel,skripta ČVUT Praha, FS, Praha 1989M. Okrouhlík: Aplikovaná mechanika kontinua II., skripta ČVUT Praha, Fak. jad. a fyz.inženýrská, Praha 1989C. Kratochvíl, E. Ondráček: Mechanika těles - Počítače a <strong>MKP</strong>, VUT Brno, FS, Praha1987J.Slavík, V. Stejskal, V. Zeman: Základy dynamiky strojů, ČVUT Praha, 1997, 319 s., ISBN 80-01-01622-6-- 4
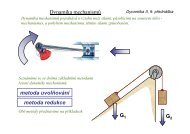
P.Horyl: Inženýrské základy <strong>MKP</strong>2.0 Mechanické struktury a jejich diskretizace2.1 Myšlenka diskretizaceZákladním krokem metody je rozdělit (diskretizovat) libovolný mechanický systém(nosník, rám, rošt, desku, stěnu, ...) na konečný počet prvků obvykle geometricky jednoduchých(úsečka, trojúhelník, obdélník, hranol,...). Dělení na prvky není v žádném případě jednoznačné aje silně ovlivněno technickými zkušenostmi a citem řešitele viz obr. 1a) až d).obr.1Příklady úloh řešených <strong>MKP</strong>Dnes sice existují automatické generátory sítí konečných prvků zvláště u rovinných úloh, avšak"poslední slovo" (opravy a úpravy vzniklé sítě v rozích, přechodech atd.) má vždy řešitel úlohy.Jestliže tedy systém rozdělíme na prvky, vybíráme vlastně za určující (prvotní neznámé)jen ty body konstrukcí (v podstatě z nekonečného počtu bodů kontinua), které nejčastěji leží vrozích prvků, koncových bodech, uprostřed hran, ploch atd. viz obr. 2a) až f). V těchto uzlech (ukterých je konečný počet) vypočítáme prvotní neznámé veličiny (ve statických úlohách obvykleposunutí) a z nich odvozeně druhotné (ve statice vnitřní síly a napětí). Ze známých fyz. veličinuzlových hodnot jednoho prvku pak můžeme určit jakoukoliv veličinu libovolného bodu prvku.-- 5
P.Horyl: Inženýrské základy <strong>MKP</strong>obr.2 Příklad diskretizace pro nelineární materiálové úlohy2.2 Základní typy prvkůjednorozměrné přímé prvky∆ 2∆ 1prvek typu „tyč“ (spar, link )prvek typu „trubka“ (pipe)-- 6
P.Horyl: Inženýrské základy <strong>MKP</strong>prvek typu prostorový nosník (beam)rovinný prvek typu „stěna“ (plane)prostorový prvek typu „cihla“ (solid).Výkonné programové systémy obsahují až stovky prvků ( vrstevnaté, prvky typu nelineárnípružina či tlumič, prvky vhodné pro akustické problémy…………atd. ).2.3 Problémy lineární mechaniky a jejich matematické formulace-- 7
P.Horyl: Inženýrské základy <strong>MKP</strong>Z důvodů úsporných matematických zápisů budeme v dalším textu používatmaticový zápis. Symboliku těchto zápisů uvádí následující přehled:AA −1B d... matice A... inversní matice A (platí A A... diagonální matice B1 d ... jednotková diagonální maticeC T{n}{P}−1=d1 )... matice transponována... sloupcová matice, častěji sloupcový "vektor"... řádková matice, častěji řádkový "vektor".Základními problémy mechaniky poddajných těles a prostředí jsou statické problémy adynamické problémy.2.3.1 StatikaZákladní statickou rovnicí <strong>MKP</strong> je systém lineárních rovnic. V maticovém tvaru[ K ]{ } = { F}∆ (2.1)kde [K] je reálná matice tuhosti řešeného systému (globální), která je symetrická, pásová,positivně definitivní a obvykle řídká.( ∆ ){F}... vektor neznámých deformačních parametrů systémů... vektor celkového (globálního) zatížení.Rozepsáním výše uvedené maticové rovnice dostaneme systém lineárních rovnic pro neznáméhodnoty deformačních parametrů ∆ 1až ∆ n.∆ k + ∆ k + ∆ k + .................... = f1 11 2 12 3 13 1∆ k + ∆ k + ∆ k + .................... = f1 21 2 22 3 23 2. . . . .. . . . .. . . . ........................+ ∆k + ∆ k = fn−1 n, n−1n n,n n(2.2)Počtem neznámých je určen řád úlohy, v našem případě n, a matice tuhosti [k] bude mít řád nxn.Po vyřešení neznámých (v praktických úlohách se jejich počet pohybuje kolem tisíc až do-- 8
P.Horyl: Inženýrské základy <strong>MKP</strong>3.0 Statický výpočet elementární nosníkové úlohy3.1 Odvození diferenciální rovnice průhybové čáryPro pochopení podstaty <strong>MKP</strong> si zvolíme triviální nosníkovou úlohu, kterou budeme řešitexaktně, na základě energetických principů a zejména pak <strong>MKP</strong>. Jedná se o prostý nosník délkyl, konstantní ohybové tuhosti EJ, který je zatížen konstantním spojitým zatížením q.qAlEJBObr.3: Jednoduchá nosníková úloha3.1.1 Exaktní odvozeníZe známých vztahů technické teorie pružnosti (Schwedlerova věta) můžeme odvoditzávislost spojitého zatížení q ( x )a ohybového momentu M ox ( ).Platí:qdT(x)= (3.1)dx( x)−aT( x )dMox (= ) .(3.2)dxkde T ( x )je funkce posouvající síly. Po dosazení (3.2) do (3.1) dostanemeM ′′ = −q.(3.3)o( x)( x)Pro malé průhyby y ( x )a ploché křivky platí dáleMox ( )y" ( x )=− ,(3.4)EJkde záporné znaménko je zavedeno z toho důvodu, aby kladný ohybový moment způsobil kladnýprůhyb y ( x ). Po provedení druhé derivace (3.4) a dosazení do (3.3) mámeEJy= qx(3.5)IV( x) ( )10 --
P.Horyl: Inženýrské základy <strong>MKP</strong>což je diferenciální rovnice čvrtého řádu pro výpočet průhybu nosníku. Tuto rovnici musímedoplnit příslušnými okrajovými podmínkami úlohy. Dělíme je na :geometrické (podstatné) y( o ) = 0 , y ( l) = 0(3.6)fyzikální (nepodstatné) y" ( o ) = 0, y"( l) = 0(3.7)také M ( ) 0 , M ( ) = 0o o=o lSystém rovnice (3.5) až (3.7) definuje tzv. okrajovou úlohu.3.1.2 Odvození užitím variačního počtu(hledání minima potenciální energie)Mezi základní variační principy statiky patří princip minima potenciální energie.Říkáme: ze všech deformací vyhovujících okrajovým podmínkám úlohy nastane taková, pro nížje celková potenciální energie soustavy minimální.Potenciální energii vyjádříme jako součet potenciální energie vnitřních sil (deformačníenergie) a potenciální energie vnějších sil (zatížení).Tedy Π= Πd + Π(3.8)zΠ.....celková potenciální energieΠ d....potenciální energie vnitřních silΠ z....potenciální energie vnějších sil.V případě našeho příkladu, kde uvažujeme práci jen ohybového momentu dostanemepro Π dnásledující rovnici, viz např. [1-Lenert]:Πd=2llo(x)1∫ dx = EJ∫( y"( x))oM21 2EJ2odx.(3.9)Potenciální energii zatížení vztáhneme k "nulové hladině" nezatíženého nosníku (je dána záporněvzatou prací vnějších sil):Πzl= −∫oq(y dx,(3.10)x)potom celková energie( x)Π = Πd+ Πz=l∫o⎛⎜⎝12( y")2 ⎞EJ( x )− q( x )y( x ) ⎟dx.(3.11)⎠Všimněme si, že hodnota integrálu pro П v (3.11) závisí na tvaru funkce y x ( )(resp. derivacíchtéto funkce.) Taková veličina (energie), která závisí na "použité" fci y se nazývá funkcionál , v11 --
P.Horyl: Inženýrské základy <strong>MKP</strong>našem případě jde o funkcionál energie. Hledáním extrému funkcionálů se zabývá variační počet,který definuje minimum funkcionálů tehdy, jestliže jeho variace je rovna nule, tedyl( y")⎛ 12 ⎞δ Π = δ ∫ ⎜ EJ( x)− q(x)y(x)⎟dx= 0.(3.12)⎝ 2⎠oJinak řečeno: podmínkou extrému funkcionálů je nulovost jeho variace. Jak si tuto variacipředstavujeme, ukážeme na našem nosníku. Nechť fce y ( x )způsobí, že celková potenciálníenergie nosníku bude minimální.εw (x)y (x)y (x) +δyObr. 4: Variace funkce y ( x )Zvolme si fci w ( x ), pro kterou platí w ( o)= 0, w(l)= 0 a její násobek bude právě variací (obměnou)fce y ( x ). Tedyδ y = εw ( x),(3.13)a celková potenciální energieΠ =l∫o1 2⎛⎞⎜ EJ ( y"+ ε w") − q( y + εw)⎟dx.(3.14)⎝ 2⎠Protože víme, že y ( x )je funkcí, pro níž je П konstantní, musí proměnná ε splňovat podmínkuδ Πδεε =0=0 .(3.15)Při výpočtu variace dostávámeδΠ=δεl( ( y + εw") w"−qw) dx = ( EJy"w"− )∫ "ε = 0 ∫ qw dx =oEJ 0lo(3.16)Prvý člen rozdílu za integrálem vypočítáme integrací "per partes" a dosazením okrajovýchpodmínek úlohy dostaneme12 --
P.Horyl: Inženýrské základy <strong>MKP</strong>l∫ol∫EJy " w"dx = EJwy IV dx(3.17)a po dosazení do (3.16)lIV( EJy − q)o∫ w = 0 (3.18)oPro libovolnou w ( x )musí platitEJy IV − q = 0,(3.19)což je opět (3.5). Diferenciální rovnici naší úlohy jsme získali užitím základní věty variačníhopočtu (uplatněním energetického přístupu k řešení úlohy). Je samozřejmé, že současně s (3.19)musí platit okrajové podmínky (3.6) a (3.7).3.2 Řešení okrajové úlohy-exaktní (čtyřnásobnou integrací a výpočtem integrační konstant z okrajovýchpodmínek)-přibližné a) energetické principy (Ritzova metoda,...)b) ostatní (<strong>MKP</strong>, ...)3.2.1 Exaktní řešení okrajové úlohyPro vyřešení průhybu jako y = f ( x )z rovnice (3.5) pro příklad dle obrázku 3, použijemepostupnou integraci. Zavádíme q = q= konst. a J = konst.EJ.yIV( x )=q( x )EJ. y = qx c(3.20)III( x )+11EJ y 2. ( x ) qx + c1x + c22(3.21)I 1 3 1 2EJ . y( x )qx + c1x + c2x + c36 2(3.22)13 --
P.Horyl: Inženýrské základy <strong>MKP</strong>EJ . y = 1 4qx + 1 3( x )c x + 1 2c x + c x +12 3c4 .24 6 2(3.23)Uplatněním geometrických okrajových podmínek (průhyb na počátku a konci nosníku)y oa y 0 dostaneme z rovnice (3.23) :( )= 0( l)=4ql1 3c4= 0 a 0 = + c1l+ c3l.(3.24) a (3.25)24 6"Silové" okrajové podmínky dosazené do (3.21) dávají rovnice1 2c l l2= 0 a 0 = q + c1 , (3.26) a (3.27)2z čehožc1= − q .(3.28)21l1 3Po dosazení (3.28) a (3.25) vyjde c3= ql.(3.29)24Dosadíme-li za konstanty c 1 až c 4 do rovnice (3.23) dostaneme funkci průhybu y ve tvaruPro1 4 1 3 1 3EJy = qx − ql x + qlx.(3.30)24 12 24lx = bude mít průhyb hodnotu :2y445 qlql= (3.31)384 EJEJ( l / 2) = 0,0130208 .Další veličiny ať geometrické (úhel natočení) či fyzikální (posouvající síly a ohybové momenty)získáme dosazením konstant c 1 až c 3 do rovnic (3.22), (3.21) a (3.20).14 --
P.Horyl: Inženýrské základy <strong>MKP</strong>3.2.2 Ritzova metodaAutor předpokládá řešení průhybu ve tvaru řadyyn= ∑ aϕ( x) i ( x)ii=1(3.32)kde y ( x )... přibližné řešení průhybuϕ ( x ) i... fce splňující alespoň geometrické okrajové podmínkya i... neznámé konstanty.Funkcionál energie bude mít obecně tvar( a a )Π = F 1,2,..., a n(3.33)a jeho minimum budeme hledat z podmínky nulovosti jeho variací pro každou neznámou veličinua 1 t.j.δΠ= 0,i = 1,2,..., n.δa i(3.34)Na základě platnosti (3.32) vedou rovnice (3.34) na soustavu n lineárních rovnic pro neznámékoeficienty a i .Zvolme přibližné řešení ve tvaru přípustné fce např. takto :2( − x) + a x ( − ).= l l(3.35)y( x )a1x2xTato rovnice splňuje geometrické okrajové podmínky( y o, y 0),ale nesplňuje fyzikální okrajové podmínky, poněvadž y ≤ 0, y′′0.( )= 0( l)=Funkcionál úlohy má tvar :"( o)( l)≤Π1l2( a , a ) = EJ ( y") dx − qydx = EJ 4( − a + a ( l − x))l∫l∫1 21 2322ooo1l∫2dx −222 2 q 3 4( a x( − x) + a x ( l − x)) dx = 2EJl( a + a a l + a l ) − ( 2al a )− ∫ q1l21 1 2 21+2l. (3.36)12o15 --
P.Horyl: Inženýrské základy <strong>MKP</strong>Příslušné variace pakδΠδa1= 2EJl(2a1+ a21l)− ql63= 0(3.37)aδΠδa2= 2EJl(a l + 2a122l ) −112ql4= 0.(3.38)Z posledních dvou rovnic vypočítáme konstanty a 1 , a 2 :2qla1 = , a2= 024EJ(3.39) a (3.40)Po dosazení obou konstant do (3.35) dostaneme vztah pro průhyb ve tvaru2qly( x )= ( l − x)x24EJ(3.41)průhyb uprostřed nosníku má dle této náhradní funkce hodnotu.4qly(1/2) = 0,01042 .(3.42)EJOdchylka od exaktní hodnoty je cca 19 %, tedy značná.Zřejmě byla volena funkce y příliž nízkého řádu a nesplňovala fyzikální okrajovépodmínky.Úspěch této přibližné metody je závislý na vhodné volbě náhradní (aproximující)funkce. Zároveň však chceme, aby byla "vhodná" pro matematické zpracování. Uvedená chyba uvyšších derivací zákonitě narůstá (např. ohybový moment má konstantní průběh v závislosti nax).Hlavní nevýhodou je však skutečnost, že náhradní funkce nahrazuje průběh průhybu nacelé oblasti. U výše uvedeného elementárního příkladu tato skutečnost zvláště nevyniká, ale tatonevýhoda je zásadního charakteru a neumožňuje řešení praktických úloh.16 --
P.Horyl: Inženýrské základy <strong>MKP</strong>3.2.3 <strong>MKP</strong> - deformační variantaZkušební příklad z obr. 3 můžeme v <strong>MKP</strong> rozdělit na konečný počet nosníkovýchprvků, např. na čtyři, jak je naznačeno v následujícím obrázku. Tímto krokem jsme provedlidiskretizaci úlohy, poněvadž za prvotní neznámé deformační parametry jsme vybrali ty, kteréodpovídají uzlům dělení 1 až 5.Čísla prvkůČísla uzlů:Lokální1211 2 3 4342 3 41234123412345Globální DPpo prvcích12343456567878910GlobálníDP:a) bez vlivuokrajových12345678910b) s uvážením 0okrajových 1podmínek23405607obr.5 : Dělení nosníku na deformační parametry (DP)3.2.3.1 Funkce tvaru ohýbaného prvkuNosníkový přímý prvek (délky L) si nyní zakreslíme ve stavu před a po deformaci avyznačíme si deformační parametry (dále jen DP) ohybu ∆ 1 až ∆ 4 (pro názornost jsou deformacevýrazně zvětšeny).∆1∆ 2∆ 3∆ 4Obr.6 : Deformační parametry ohýbaného prvku17 --
P.Horyl: Inženýrské základy <strong>MKP</strong>∆ 1... průhyb v počátku prvku t.j. pro x = 0∆ 2... úhel natočení průřezu v počátku prvku t.j. x = 0∆ 3... průhyb v konci (koncovém uzlu) prvku t.j. x = L∆ 4... úhel natočení v konci prvku t.j. x = L .Méně DP nemůžeme volit, více teoreticky ano. V následujícícím odvození vystačíme u ohybu sminimálním počtem t.j. se čtyřmi DP. Ohybovou čáru nahraďme polynomem 3. stupně a to jen vrámci jednoho prvku. Protože jde o "přiblížení", označíme tuto fci w ( x ). Tedy :2w = b + bx+ bx + bx3( x ) 0 1 2 3.(3.43)V dalším odvozování je výhodnější používat bezrozměrnou souřadnici ξ místo x. Transformačnívztahy mezi nimi jsou dány:x dxξ= a dξ=. (3.44)L LZa základní rovnici nahrazující fci y budeme tedy považovat rovnici2 3wξ = a + aξ + a ξ + a ξ( ) 0 1 2 3,(3.45)kterou můžeme přepsat do maticové symbolikyw⎧ 1 ⎫⎪ξ⎪TT= { a0, a1,a2, a3} ⎨ = {}{} a ξ {}{}. ξ2 ⎬(3.46)⎪ξ⎪⎪3⎩ξ⎪⎭( ξ )= aŘádkové vektory {} a{} { a a , a , a }T{} ξTa jsou definovány:a T =0,1 2 3... a0až a 3jsou neznámé konstanty,{} ξ T= { 1, ξ,ξ 2ξ 3 }.(3.47)Ohybová čára w ( ξ )je jednoznačně určena čtyřmi konstantami a 0až a 3. Naší snahou bude nynívyjádřit závislost těchto konstant na DP prvku ∆ 1až ∆ 4. Definice jednotlivých DP jsounásledující:∆ =(3.48)( )1w 0∆2=dwdxx=0=dw dξ. =dξdxdw 1.dξLξ = 0(3.49)18 --
P.Horyl: Inženýrské základy <strong>MKP</strong>∆ =(3.50)()3w 1dw dw dξdw 1= = . = . . (3.51)∆ 4dxx= Ldξdx dξLξ=1Proveďte nyní prvou derivaci průhybu w dle ξ:dw2= a1+ 2a2ξ+3 a3ξ. (3.52)dξDosazujeme postupně (3.45) a (3.52) do rovnic definujících DP t.j. (3.48) až (3.51)= a (3.53)/ (3.54)a a a a (3.55)∆ (3.56)∆ 1 0∆ 2= a 1L∆ 3= 0+ 1+ 2+ 34= a1+ 2a2+ 3a3/ L( ) .Poslední čtyři rovnice vyjádříme maticovým zápisem:⎡10 0 0 ⎤⎢ 1 ⎥⎢0 0 0⎥∆ ⎢11 1 1 ⎥(3.57)⎢ 1 2 3 ⎥⎢0⎥⎣ L L L⎦{ } = L .{} a = [ S]{}.. aVyjádříme nyní z rovnice (3.57) neznámý vektor { a }{} = [ S] − 1.{ ∆}a (3.58)a dosadíme do posledního výrazu rovnice (3.47). Předtím musíme určit inverzní matici [ S ] − 1.Inverze čtvercové matice S řádu 4x4 provedeme některým ze známých způsobů a obdržíme⎡ 1 0 0 0 ⎤⎢0 L 0 0⎥S (3.59)⎢−3 − 2L3 − L⎥⎢⎥⎣ 2 L − 2 L ⎦−1[ ] = ⎢⎥.19 --
P.Horyl: Inženýrské základy <strong>MKP</strong>PotomT −1T{}[ ξ S] { ∆} = { N} { }.w( ξ )=∆(3.60)Vektor { N } je tzv. funkce tvaru (shape function) a poslední tvar rovnice (3.60) má v <strong>MKP</strong>mimořádnou důležitost.Pro daný aproximační polynom je tato funkce jednoznačně dána a je závislá pouze nadélkové souřadnici. Veškeré deformace se určí pomocí funkce tvaru N a známých hodnot DP{ ∆ }. Konkrétní tvar { N } pro náš aproximační polynom dostaneme po vynásobení prvých dvoučlenů rovnice (3.60)T T −12 32 3 2 3 2 3{ N} = { ξ } .[ S] = { 1−3ξ+ 2ξ, L( ξ − 2ξ+ ξ ),3ξ− 2ξ, L( −ξ+ ξ )}(3.61)TRovnici (3.61) můžeme také psát ve tvaru: w = { ∆} .{ N} = { } .{ ∆}( ξ )N(3.62)20 --
P.Horyl: Inženýrské základy <strong>MKP</strong>3.2.3.2 Matice tuhosti ohýbaného prvku [k]Vnitřní energie elementu ohýbaného nosníku délky L podle obr. 6, můžeme vyjádřitrovnicí (3.9). Jestliže vyjádříme druhou derivaci průhybové čáry w '' (x) následující rovnicí,můžeme bezprostředně dosazovat do (3.9.).{ N}T 2{ ∆} d .{ N} .222 2 Td w(x)d w(ξ ). ⎛ dξ⎞ d 1w′ ( x)= =. . { }22⎜ ⎟ =∆ =(3.63)2 22dx dξ⎝ dx ⎠ dξL L dξ2V rovnici (3.63) jsme uplatnili vztah (3.61). Potenciální energie deformovaného prvku bude mítpotom tvar:122 T1 1 T⎛ d{ }{ N} d { N}1 ⎞Π = ∫ ∆ ⎜⎟d.EJ .{ ∆}. L.dξ=2 22 220L ⎝ dξdξL ⎠2{ N} d { N}1 2T1 T⎛ EJ d⎞ 1= { ∆}⎜ . ⎟222∫ k⎝20L dξdξ⎠T{ ∆} = { ∆} [ ]{ }.3∆(3.64)Matice tuhosti [k] ohýbaného prvku, za předpokladu konstantní hodnoty součinu EJ bude mítnásledující tvar:⎧ − 6 + 12ξ⎫⎪ ⎪EJLk = ⎨6 ξ3L ⎪⎪⎩L⎭[ ]( − 4 + 6ξ) ⎪⎬.{ − 6 + 12ξ, L( − 4 + 6ξ),6−12ξ, L( − 2 + ξ )} d =6 −12ξ⎪( − 2 + 6ξ) ⎪=4EJL1∫2( 6ξ− 3) L( 6ξ− 3)( 3ξ− 2) 2− ( 6ξ− 3) L( 6ξ− 3)( 3ξ−1)22L ( 3ξ− 2) L( 3ξ− 2)( 3 − 4ξ)2L ( 3ξ− 2)( 3ξ−1)2( 3 − 6ξ) L( 3 − 6ξ)( 3ξ−1)22L ( 3ξ−1)⎡⎢⎢⎢⎢⎢⎣symetrická část⎤⎥⎥dξ⎥⎥⎥⎦,30po integraci a dosazení mezí⎡ 12, 6L,−12,6L⎤⎢224 6 , 2⎥EJ L − L Lk3⎢12, − 6L⎥(3.65)L⎢2 ⎥⎣sym.4L⎦[] = ⎢⎥.21 --
P.Horyl: Inženýrské základy <strong>MKP</strong>Πz= −L3.2.3.3 Vektor zatížení {f}Potenciální energie vnějších sil Π z je dle rovnice (3.10) dána vztahemTT{ N} d { ∆} = −{ f } { }∫qx). w(x)dx = −∫q()w(ξ )Ldξ= −L∫q(ξ )ξ.∆01(,01ξ(3.66)0kde vektor {f} je vektor spojitého zatížení prvku u ohybu, obecněji pak vektor ekvivalentníhouzlového zatížení prvku. Je definován výrazemT{ f } = L q { N}1∫0T( ξ ). dξ,(3.67)ve kterém se předpokládá spojitý charakter q ( ξ )na celé délce prvku. Pro konstantní spojitézatížení q = q=konst., dostaneme po integraci( ξ )⎧qL⎨⎩ 22qL12qL2T{ f } = , , , .12− qL ⎫⎬12 ⎭(3.68)Vektor zatížení předepisuje, jakým způsobem přepočítáme do uzlu zatíženého prvku účinekspojitého zatížení (viz obr. 7). Ve smyslech diskrétních sil qL 2záporné znaménko spojitého zatížení q (záporný směr osy y).qL2a momentů12je již uváženoqf 1= qL/2f 3= qL/2Lf 2= qL 2 /12f 4 = -qL 2 /12Obr. 7: Transformace spojitého zatížení nosníku na ekvivalentní uzlové zatížení22 --
P.Horyl: Inženýrské základy <strong>MKP</strong>Pro trojúhelníkové zatížení dle obr. 8 dostaneme po dosazení za q(3.67) vektor { f 2} ve tvaru:22T ⎧ 3 q 7⎫oLqoL{ f } = q L,, q L,− .2⎨⎩20o3020o20⎬⎭( ξ )q o.= ξ do rovnice(3.69)q of 1 =3q o L/20f 3 =3q o L/20Lf 2 =q o L 2 /30f 4 = - q o L 2 /20Obr. 8: Transformace spojitého trojúhelníkového zatížení nosníku na ekvivalentní uzlové zatíženíDiskretizaci spojitého zatížení můžeme vyřešit pro jakoukoliv spojitou funkci q ( ξ ).Lichoběžníkové zatížení můžeme zkombinovat z vektorů { f 1} a { f 2}.Diskrétní síly předpokládáme pro jednoduchost v uzlech (vždy si jej můžeme v místěf bude mít tvar:zatěžující síly či momentu zvolit). Příslušný vektor zatížení { } dT{ f } { F M , F , },1, 1 2M2d= (3.70)kde kladné smysly zatěžujících sil a momentů jsou znázorněny v obr. 10.F 1M 2F 2M 1Obr.9 Přímé uzlové zatížení23 --
P.Horyl: Inženýrské základy <strong>MKP</strong>3.2.3.4 Základní statická rovnice <strong>MKP</strong>prvkuNa základě rovnice (3.11) stanovíme celkovou potenciální energii akumulovanou vΠp= Πd+ Πz1=2TT{ ∆} [ ]{ ∆} − { f } { ∆}.k (3.71)Jestliže určitým způsobem "sečteme" potenciální energie všech prvků, (praktické provedenísumace bude vysvětleno později) dostaneme vztah pro potenciální energii celého systému:Π =n12nTT∑Πpi= ∑{ ∆i} [ ki]{ ∆i} −∑{ fi} { ∆i}.i= 1 i= 1 i=1n(3.72)Po zavedení matic tuhosti systému [K] a celkového zatěžovacího vektoru {F} můžeme dále psát1 TTΠ = { ∆G} [ K ]{ ∆G} − { F} { ∆G},(3.73)2kde vektor{∆ G } obsahuje všechny deformační parametry řešené soustavy, kterých bude celkem s(prvků je n). Matice tuhosti [K] je symetrická, čtvercová, řádu s. Výsledný zatěžovací vektorobsahuje součet přímého zatížení uzlů a ekvivalentního zatížení uzlů. Jestliže zde uplatnímevariační princip minima potenciální energie z kapitoly 3.1.2, musejí veličiny obsažené ve vektoru{∆ G } splňovat podmínku nulovosti variace funkcionálu energie. TedyδΠδ{ ∆ }G[ K ]{ ∆ } − { },= 0 = FG(3.74)[ K ]{G} = { F}∆ (3.75)Poslední rovnice je základní rovnicí statických úloh <strong>MKP</strong> a jde o systém lineárních rovnic proneznámé deformační parametry {∆ G } (viz kapitola 2.2.1, rovnice (2.1) a (2.2)).3.2.3.5. Výpočet vnitřních silových účinkůPosouvající sílu a ohybový moment můžeme vypočítat ze známé hodnoty průhybovéčáry podle rovnice (3.2) a (3.4), do nichž si však za průhybovou čáru y ( x )dosadíme jejípřibližnou hodnotu w(ξ )z rovnice (3.61). Vztah pro ohybový moment bude mít tvar,Mo2T{ N} { }EJ { }T{ },222d w ⎛ dξ⎞ EJ d w EJ d= −2 . ⎜ ⎟ EJ = −2 . = −2 2 . ∆ = −22dξ⎝ dx ⎠ L dξL dξLg∆(3.76)24 --
P.Horyl: Inženýrské základy <strong>MKP</strong>kde jsme zavedli pro druhou derivaci fce tvaru {N} dle ξ řádkový vektor {g} . Po provedení tétodruhé derivace bude {g} T mít hodnoty{ N}T2d= L2dξPosouvající síla T je dána následujícím výrazemT{ g} = { − 6 + 12ξ, L(−4+ 6ξ), 6 −12ξ, ( −2+ 6ξ)}. (3.77)TdM= −dxoT{ N} { }EJ { }T{ }.333d w d w ⎛ dξ⎞ EJ d= EJ . = EJ3 .3 . ⎜ ⎟ =3 .3 . ∆ =3dx dξ⎝ dx ⎠ L dξL3.p∆(3.78)Třetí derivace fce tvaru { N } Tdle ξ jsme označili { p } Ta má tyto hodnoty:{ N}3d3dξT={ p}T={} qddξT= { 12, 6L,−12,6L}.(3.79)Nyní vyjádříme TaM ov rozepsaném tvaruMoEJEJ= −2 21236ξLL(3.80)T{}{} q ∆ = − (( − 6 + 12ξ) ∆ + L( − 4 + 6ξ) ∆ + ( 6 −12ξ) ∆ + L( − 2 + ) ∆ )4TEJ EJ= 123 3 1 2 3L∆4LLT{ p} { ∆} = ( ∆ + 6L∆−12∆+ 6 ).(3.81)Vypočítáme nyní vztahy pro vnitřní síly v počátku a konci prvku (t.j. pro ξ = 0 a ξ = 1).EJM o( p)= ( 6∆1+ 4L∆2− 6∆3+ 2L∆4)(3.82)2L1( − 6∆− 2L∆+ 6∆− )EJM o( k)=2 2 34L∆4(3.83)LEJT ( p)= T ( k)= ( 12∆1+ 6L∆2−12∆3+ 6L∆4).(3.84)3LČastým problémem je užití znaménkových dohod zde vypočtených vnitřních silových účinků.Zásadně si musíme uvědomovat, že znaménka jsou dána přísně fyzikálním smyslemposouvajících sil (sil ║ s osou y) a ohybovým momentem (statický moment vůči ose z). Kladnésmysly jsou nakresleny v obr. 10.25 --
P.Horyl: Inženýrské základy <strong>MKP</strong>T ( k )Mo ( p )T ( p )Mo ( k )Obr. 10 : Smysly vnitřních silových účinků ze vztahů (3.82 až 3.84)Z uvedeného vyplývají velmi důležité závěry pro charakter funkcí M oa T v závislosti nadélkové pořadnici. Pro zvolený kubický aproximační polynom je vždy (t.j. při jakémkolivzatížení) průběh ohybového momentu lineární a posouvající síly konstantní. Takže nás nesmípřekvapit skutečnost, že i při spojitém zatížení bude zde průběh M olineární (i když pro q =konst. by měl být parabolou druhého řádu). Tato nepřesnost diskretizace se eliminuje jemnějšímdělením "oblasti" ( v našem případě nosníku) na větší počet konečných prvků, jak bude dáleprokázáno.Pozn.: K hodnotám ze vzorců (3.85) až (3.87) pro ξ = 0,1 můžeme dojít i z rovnice (3.75), jestližeji aplikujeme na jeden "uvolněný prvek", který je ve stavu statické rovnováhy.3.2.3.6. Vlastní výpočet zkušebního příkladuZkušební příklad rozdělíme nejdříve na dva konečné prvky podle obrázku 11. LokálníDP jsou (pro ohyb a kubický aproximační polynom) celkem čtyři, připomeňme si, že 1. a 3. DPoznačují průhyby a 2. a 4. DP označují úhly natočení (obr.6).Čísla1 2Lokální12341234Globální DPpo prvcích12343456GlobálníDP:a) bez vlivuokrajových123456b) s uváženímokrajovýchpodmínek012003Obr. 11 : Dělení základního nosníku na dva prvky, číslování DP26 --
P.Horyl: Inženýrské základy <strong>MKP</strong>Poněvadž uprostřed "našeho" nosníku jsou oba konečné prvky vetknuty, ztotožní se jejich DP acelkem bude na volném nosníku (bez okrajových podmínek) šest globálních DP tzv. teoretických.Jestliže uplatníme geometrické okrajové podmínky (nulové průhyby na počátku a konci nosníku)dostaneme DP podle obrázku č. 11. Úhel natočení uprostřed nosníku můžeme tzv."předelimitovat", z důvodu fyzikální a geometrické symetrie úlohy musí být roven nule. Celkovýpočet DP pak bude dán číslem tři (viz jejich označení v obr. 11). Pak jednotlivé globální DPznamenají:∆ 1...úhel natočení v počátku nosníku∆ 2...průhyb uprostřed nosníku∆ 3...úhel natočení na konci nosníku.Matice tuhosti celého nosníku bude mít rozměr 3 x 3. Jak se vytváří z jednotlivých matic tuhostíprvků si nyní ukážeme. Do matice (3.65) dosadíme za L = l/2 a každému prvku matice přiřadímepodle globálních DP číslo, které udává index umístěníčísla glob.DP: 0 ↓ 1 ↓ 2 ↓ 0 ↓indexy pro matici k 1⎡ 12 3l−123l⎤ 0 ← ⎡0001 02 00⎤⎢22 ⎥←⎢⎥8EJ[ ] ⎢3ll − 3ll / 2=⎥1⇒⇒ ⎢10 11 12 10k⎥1 3l ⎢−12− 3l12 − 3l⎥ 2 ← ⎢2021 22 20⎥⎢22 ⎥ ⎢⎥⎣ 3ll / 2 − 3ll ⎦ 0 ← ⎣0001 02 00⎦Obr. 12 : Přiřazení členů lokální matice tuhosti [k 1 ] do matice globální [K] .tohoto lokálního prvku matice tuhosti v globální matici tuhosti [k 1 ] (obr.12).Indexy obsahující nulu "vypadnou", z obr. 12 pak vyplývá, žekkkkpřijde na místo"""KKKK22 1123 1232 2133 22.Podobná "variace" indexů globálních DP určí místo, kam se do matice[K] napíší prvky matice[k 2 ] ( viz schema v obr. 13).čísla glob.DP: 0 ↓ 1 ↓ 2 ↓ 0 ↓indexy pro matici k 2⎡ 12 3l−123l⎤ 2 ← ⎡2220 20 23⎤⎢22 ⎥←⎢⎥8EJ[ ] ⎢3ll − 3ll / 2=⎥0⇒⇒ ⎢02 00 00 03k⎥2 3l ⎢−12− 3l12 − 3l⎥ 0 ← ⎢0200 00 03⎥⎢22 ⎥ ⎢⎥⎣ 3ll / 2 − 3ll ⎦ 3 ← ⎣3230 30 33⎦obr. 13 : Přiřazení členů lokální matice tuhosti [k 2 ] do matice globální [K]27 --
P.Horyl: Inženýrské základy <strong>MKP</strong>Výsledná matice tuhosti [K] nosníku má následující hodnoty:2⎡ l − 3l0 ⎤8EJ⎢⎥K = ⎢−3l24 3l3⎥(3.89)l⎢2⎥⎣0 3ll⎦[ ]Nyní musíme vytvořit výsledný vektor zatížení . Pro prvek zatížený spojitě jsme odvodilizatěžující vektor {f} v rovnici (3.68). Pro prvky č.1 a 2 bude mít tvar:ql42ql48ql42ql⎫⎬48 ⎭T T{ f } = { f } = − , − , − , .12⎧⎨⎩(3.90)DPprvek 1:prvek 2 :↑021↑0↑20↑03Pod rovnicí (3.90) jsou uvedena čísla DP obou prvků, která určují, kam se příslušná číselnáhodnota přičte ve výsledném vektoru zatížení {F}. Dostaneme22⎧qlqlql⎫F T ⎨⎬(3.91)⎩ 48 2 48 ⎭{ } = , − , ,což je tzv. ekvivalentní uzlové zatížení nosníku. Matici [K] a vektor {F} dosadíme do základnístatické rovnice <strong>MKP</strong> (3.78).8EJ3l2⎡ l⎢⎢−3l⎢⎣0− 3l243l0 ⎤ ⎧∆⎥ ⎪3l⎥.⎨∆2l ⎥ ⎪⎦ ⎩∆1232⎧ ql⎫⎪−⎪⎫ ⎪48⎪⎪ql⎬ = ⎨ − ⎬⎪ ⎪ 22⎪⎭ ⎪ ql+ ⎪⎪⎩48 ⎪⎭(3.92)Pro výpočet neznámých DP ∆ 1až ∆ 3dostáváme po rozvoji maticové rovnice (3.92):52 qll ∆1− 3l∆2= −384EJ(3.93)4ql− 3l∆1+ 24∆2+ 3l∆3= −16EJ(3.94)28 --
P.Horyl: Inženýrské základy <strong>MKP</strong>52 ql3l ∆2+ l ∆3= + .(3.95)384EJSoučtem rovnic (3.93) a (3.95), dostáváme vztah∆=− ∆ , (3.96)1 3což je plně v souladu s fyzikálním významem rovnice. Úhly natočení na počátku nosníku a nakonci nosníku jsou stejně veliké, ale opačného smyslu - což je zřejmé, že musí platit. Pocelkovém výpočtu dostaneme:3431 ql5 ql1 ql∆1= − , ∆2= − , ∆3= .(3.97)až(3.99)24 EJ 384 EJ 24 EJVšechny uvedené hodnoty jsou "přesné" (viz (3.31)), tento překvapivě přesný výsledek i při"hrubém" dělení nosníku na dva prvky umožnila poměrně jednoduchá úloha a využití symetrie vpředeliminaci DP. U posouvajících sil a ohybových momentů však již dostaneme výraznějšíodchylky od exaktního řešení. Dosaďme vypočtené hodnoty DP do vztahů (3.82) až (3.84).Prvek Posouvající síla Ohybový momentpočátek konec počátek konec1qlql2l7 − ql4448482qlql2−−7 2ql− ql444848q 2Vypočítané výsledky jsou zobrazeny v obr. 14. V části b) jsou zobrazeny i hodnoty spojitéhozatížení přímo nad reakcemi (ql/4), které se ve vektoru zatížení {F} neprojeví. Odchylky odexaktního řešení jsou v grafech T a M odány rozdíly v pořadnicích mezi čárkovanou a plnoučarou. U ohybového momentu jsou menší, než u posouvající síly. Při zjemnění dělení nosníku na4 prvky, dostáváme přesnější výsledky (obr. 15). Výrazné zmenšení odchylek od exaktníhořešení je zvláště patrné u ohybových momentů.29 --
P.Horyl: Inženýrské základy <strong>MKP</strong>qAEJBl12Výsledné DP 012003∆ 1∆ 2x, ξ∆ 3Tql/2ql/4x, ξ<strong>MKP</strong> – 2 PRVKYM oEXAKTNĚql 2 /487ql 2 /48<strong>MKP</strong> – 2 PRVKYql 2 /8x, ξObr. 14 : Výsledky pro dělení nosníku na dva prvky30 --
P.Horyl: Inženýrské základy <strong>MKP</strong>Čísla prvků: 12 3 4Globální DP s uváženímokrajových podmíneka předeliminací0123402-30-1ql 2 /19219ql 2 /19225ql 2 /192ql/4ql/23ql/4Obr. 15 : Výsledky pro dělení nosníku na čtyři prvky31 --