- Page 1: ROBÓTICA TERCERA EDICIÓN JOHN J.
- Page 5 and 6: ROBÓTICA Craig, John J. PEARSON ED
- Page 7 and 8: Prefacio Por lo general, los cient
- Page 9 and 10: Prefacio vii Los capítulos 3 y 4 p
- Page 11 and 12: CAPÍTULO 1 Introducción 1.1 ANTEC
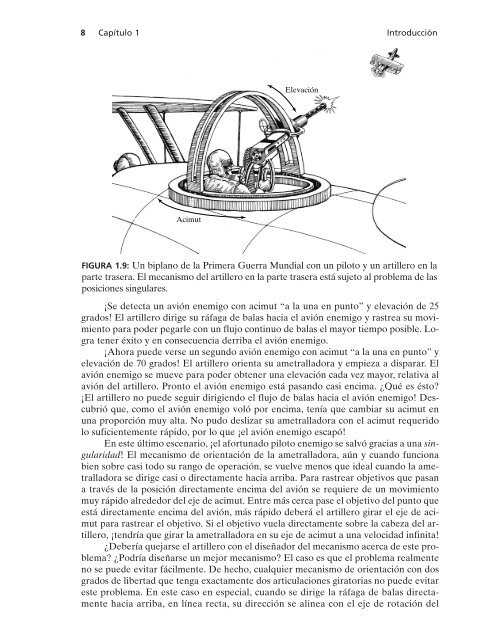
- Page 13 and 14: Sección 1.1 Antecedentes 3 FIGURA
- Page 15 and 16: Sección 1.2 La mecánica y el cont
- Page 17: Sección 1.2 La mecánica y el cont
- Page 21 and 22: Sección 1.2 La mecánica y el cont
- Page 23 and 24: Sección 1.2 La mecánica y el cont
- Page 25 and 26: Sección 1.2 La mecánica y el cont
- Page 27 and 28: Ejercicios 17 [2] R. Brooks, Flesh
- Page 29 and 30: CAPÍTULO 2 Descripciones espaciale
- Page 31 and 32: Sección 2.2 Descripciones: posicio
- Page 33 and 34: Sección 2.2 Descripciones: posicio
- Page 35 and 36: Sección 2.3 Asignaciones: cómo ca
- Page 37 and 38: Sección 2.3 Asignaciones: cómo ca
- Page 39 and 40: Sección 2.3 Asignaciones: cómo ca
- Page 41 and 42: Sección 2.4 Operadores: traslacion
- Page 43 and 44: Sección 2.4 Operadores: traslacion
- Page 45 and 46: Sección 2.6 Aritmética de transfo
- Page 47 and 48: Sección 2.7 Ecuaciones de transfor
- Page 49 and 50: Sección 2.8 Más sobre la represen
- Page 51 and 52: Sección 2.8 Más sobre la represen
- Page 53 and 54: Sección 2.8 Más sobre la represen
- Page 55 and 56: Sección 2.8 Más sobre la represen
- Page 57 and 58: Sección 2.8 Más sobre la represen
- Page 59 and 60: Sección 2.8 Más sobre la represen
- Page 61 and 62: Sección 2.9 Transformación de vec
- Page 63 and 64: Sección 2.10 Consideraciones compu
- Page 65 and 66: Ejercicios 55 2.8 [29] Escriba una
- Page 67 and 68: Ejercicios 57 {A} Z A A P r Z Y A u
- Page 69 and 70:
Ejercicio de programación (parte 2
- Page 71 and 72:
Ejercicio MATLAB 2B 61 b) Escriba u
- Page 73 and 74:
Sección 3.2 Descripción de víncu
- Page 75 and 76:
Sección 3.3 Descripción de la con
- Page 77 and 78:
Sección 3.4 Convención para asign
- Page 79 and 80:
Sección 3.4 Convención para asign
- Page 81 and 82:
Sección 3.4 Convención para asign
- Page 83 and 84:
Sección 3.5 Cinemática de manipul
- Page 85 and 86:
Sección 3.5 Cinemática de manipul
- Page 87 and 88:
Sección 3.7 Ejemplos: cinemática
- Page 89 and 90:
Sección 3.7 Ejemplos: cinemática
- Page 91 and 92:
Sección 3.7 Ejemplos: cinemática
- Page 93 and 94:
Sección 3.7 Ejemplos: cinemática
- Page 95 and 96:
Sección 3.7 Ejemplos: cinemática
- Page 97 and 98:
Sección 3.7 Ejemplos: cinemática
- Page 99 and 100:
Sección 3.8 Tramas con nombres est
- Page 101 and 102:
Sección 3.10 Consideraciones compu
- Page 103 and 104:
Ejercicios 93 u 1 u 2 u 3 L 1 L 2 F
- Page 105 and 106:
Ejercicios 95 Punta L 2 Z Y 2 X 2 1
- Page 107 and 108:
Ejercicios 97 u 3 u 2 u 1 FIGURA 3.
- Page 109 and 110:
Ejercicio de programación (parte 3
- Page 111 and 112:
CAPÍTULO 4 Cinemática inversa de
- Page 113 and 114:
Sección 4.2 Solubilidad 103 dan ob
- Page 115 and 116:
Sección 4.2 Solubilidad 105 FIGURA
- Page 117 and 118:
Sección 4.3 La noción de subespac
- Page 119 and 120:
Sección 4.4 Comparación de los en
- Page 121 and 122:
Sección 4.4 Comparación de los en
- Page 123 and 124:
Sección 4.5 Solución algebraica p
- Page 125 and 126:
Sección 4.6 Solución de Pieper cu
- Page 127 and 128:
Sección 4.7 Ejemplos de cinemátic
- Page 129 and 130:
Sección 4.7 Ejemplos de cinemátic
- Page 131 and 132:
Sección 4.7 Ejemplos de cinemátic
- Page 133 and 134:
Sección 4.7 Ejemplos de cinemátic
- Page 135 and 136:
Sección 4.8 Las tramas estándar 1
- Page 137 and 138:
4.10 REPETITIVIDAD Y PRECISIÓN Sec
- Page 139 and 140:
Ejercicios 129 4.4 [24] Derive la c
- Page 141 and 142:
Ejercicios 131 Z 3 2 Z 4 1 45 X 3 Z
- Page 143 and 144:
Ejercicio MATLAB 4 133 Los rangos d
- Page 145 and 146:
CAPÍTULO 5 Jacobianos: velocidades
- Page 147 and 148:
Sección 5.2 Notación para la posi
- Page 149 and 150:
Sección 5.3 Velocidad lineal y rot
- Page 151 and 152:
Sección 5.4 Más sobre la velocida
- Page 153 and 154:
Sección 5.4 Más sobre la velocida
- Page 155 and 156:
Sección 5.6 “Propagación” de
- Page 157 and 158:
Sección 5.6 “Propagación” de
- Page 159 and 160:
Sección 5.7 Jacobianos 149 un resu
- Page 161 and 162:
Sección 5.8 Singularidades 151 Có
- Page 163 and 164:
Sección 5.9 Fuerzas estáticas en
- Page 165 and 166:
Sección 5.9 Fuerzas estáticas en
- Page 167 and 168:
Sección 5.11 Transformación carte
- Page 169 and 170:
Bibliografía 159 Zˆ W Muñeca Wri
- Page 171 and 172:
Ejercicios 161 si el vector de velo
- Page 173 and 174:
EJERCICIO MATLAB 5 Ejercicio Matlab
- Page 175 and 176:
CAPÍTULO 6 Dinámica de manipulado
- Page 177 and 178:
Sección 6.3 Distribución de la ma
- Page 179 and 180:
Sección 6.3 Distribución de la ma
- Page 181 and 182:
Después encontramos Sección 6.4 E
- Page 183 and 184:
Sección 6.5 Formulación dinámica
- Page 185 and 186:
Sección 6.5 Formulación dinámica
- Page 187 and 188:
Sección 6.7 Un ejemplo de ecuacion
- Page 189 and 190:
Sección 6.7 Un ejemplo de ecuacion
- Page 191 and 192:
Sección 6.8 La estructura de las e
- Page 193 and 194:
Sección 6.9 Formulación lagrangia
- Page 195 and 196:
Sección 6.10 Formulación de la di
- Page 197 and 198:
Sección 6.10 Formulación de la di
- Page 199 and 200:
Sección 6.12 Simulación dinámica
- Page 201 and 202:
Sección 6.13 Consideraciones compu
- Page 203 and 204:
Bibliografía 193 [11] S. Conte y C
- Page 205 and 206:
Ejercicios 195 6.7 [18] ¿Cuántas
- Page 207 and 208:
Ejercicio de programación (parte 6
- Page 209 and 210:
Ejercicio MATLAB 6C 199 Dadas: L 1
- Page 211 and 212:
CAPÍTULO 7 Generación de trayecto
- Page 213 and 214:
Sección 7.3 Esquemas en el espacio
- Page 215 and 216:
Sección 7.3 Esquemas en el espacio
- Page 217 and 218:
Sección 7.3 Esquemas en el espacio
- Page 219 and 220:
Sección 7.3 Esquemas en el espacio
- Page 221 and 222:
Sección 7.3 Esquemas en el espacio
- Page 223 and 224:
Sección 7.3 Esquemas en el espacio
- Page 225 and 226:
Sección 7.3 Esquemas en el espacio
- Page 227 and 228:
Sección 7.4 Esquemas en el espacio
- Page 229 and 230:
Sección 7.5 Problemas geométricos
- Page 231 and 232:
Sección 7.5 Problemas geométricos
- Page 233 and 234:
Sección 7.6 Generación de rutas e
- Page 235 and 236:
Bibliografía 225 es capaz de produ
- Page 237 and 238:
Ejercicios 227 7.6 [18] Bosqueje gr
- Page 239 and 240:
EJERCICIO MATLAB 7 Ejercicio MATLAB
- Page 241 and 242:
Sección 8.2 Diseño basado en los
- Page 243 and 244:
Sección 8.2 Diseño basado en los
- Page 245 and 246:
Sección 8.3 Configuración cinemá
- Page 247 and 248:
Sección 8.3 Configuración cinemá
- Page 249 and 250:
Sección 8.4 Medidas cuantitativas
- Page 251 and 252:
Sección 8.5 Estructuras redundante
- Page 253 and 254:
Sección 8.5 Estructuras redundante
- Page 255 and 256:
Sección 8.6 Esquemas de accionamie
- Page 257 and 258:
Sección 8.7 Rigidez y deflexiones
- Page 259 and 260:
Sección 8.7 Rigidez y deflexiones
- Page 261 and 262:
Sección 8.7 Rigidez y deflexiones
- Page 263 and 264:
Sección 8.9 Detección de fuerza 2
- Page 265 and 266:
Bibliografía 255 [3] K. Waldron,
- Page 267 and 268:
Ejercicios 257 Motor eléctrico Aco
- Page 269 and 270:
Ejercicios 259 lo tanto, para fines
- Page 271 and 272:
Ejercicio MATLAB 8 261 norma mínim
- Page 273 and 274:
Sección 9.2 Retroalimentación y c
- Page 275 and 276:
Sección 9.3 Sistemas lineales de s
- Page 277 and 278:
Sección 9.3 Sistemas lineales de s
- Page 279 and 280:
Sección 9.3 Sistemas lineales de s
- Page 281 and 282:
Sección 9.4 Control de sistemas de
- Page 283 and 284:
Sección 9.5 Particionamiento de le
- Page 285 and 286:
Sección 9.6 Control de seguimiento
- Page 287 and 288:
Sección 9.8 Comparación entre con
- Page 289 and 290:
Sección 9.9 Modelado y control de
- Page 291 and 292:
Sección 9.9 Modelado y control de
- Page 293 and 294:
Sección 9.9 Modelado y control de
- Page 295 and 296:
Bibliografía 285 θ d 6503 D/A Amp
- Page 297 and 298:
Ejercicio de programación (parte 9
- Page 299 and 300:
Ejercicio MATLAB 9 289 V a (t) Volt
- Page 301 and 302:
Sección 10.2 Sistemas no lineales
- Page 303 and 304:
Sección 10.2 Sistemas no lineales
- Page 305 and 306:
Sección 10.4 El problema del contr
- Page 307 and 308:
Sección 10.5 Consideraciones prác
- Page 309 and 310:
Sección 10.5 Consideraciones prác
- Page 311 and 312:
Sección 10.6 Sistemas actuales de
- Page 313 and 314:
Sección 10.7 Análisis de estabili
- Page 315 and 316:
Sección 10.7 Análisis de estabili
- Page 317 and 318:
Sección 10.8 Sistemas de control d
- Page 319 and 320:
Sección 10.8 Sistemas de control d
- Page 321 and 322:
X d x d x d K υ E . V x ( , )
- Page 323 and 324:
Bibliografía 313 [7] L. Sciavicco
- Page 325 and 326:
Ejercicios 315 10.9 [32] Considere
- Page 327 and 328:
CAPÍTULO 11 Control de fuerza de l
- Page 329 and 330:
Sección 11.3 Un paradigma de contr
- Page 331 and 332:
Sección 11.3 Un paradigma de contr
- Page 333 and 334:
Sección 11.4 El problema de contro
- Page 335 and 336:
Sección 11.5 Control de fuerza de
- Page 337 and 338:
Sección 11.5 Control de fuerza de
- Page 339 and 340:
Sección 11.6 El esquema de control
- Page 341 and 342:
Sección 11.6 El esquema de control
- Page 343 and 344:
Sección 11.7 Esquemas de control d
- Page 345 and 346:
Bibliografía 335 o tomar cualquier
- Page 347 and 348:
Ejercicio de programación (parte 1
- Page 349 and 350:
CAPÍTULO 12 Lenguajes y sistemas d
- Page 351 and 352:
Sección 12.2 Los tres niveles de p
- Page 353 and 354:
Sección 12.3 Un ejemplo de aplicac
- Page 355 and 356:
Sección 12.4 Requerimientos de un
- Page 357 and 358:
Sección 12.5 Problemas peculiares
- Page 359 and 360:
Sección 12.5 Problemas peculiares
- Page 361 and 362:
Ejercicios 351 [10] J. C. LaTombe,
- Page 363 and 364:
CAPÍTULO 13 Sistemas de programaci
- Page 365 and 366:
Sección 13.2 Cuestiones básicas d
- Page 367 and 368:
Sección 13.2 Cuestiones básicas d
- Page 369 and 370:
Sección 13.2 Cuestiones básicas d
- Page 371 and 372:
Sección 13.3 El simulador ‘Pilot
- Page 373 and 374:
Sección 13.3 El simulador ‘Pilot
- Page 375 and 376:
Sección 13.3 El simulador ‘Pilot
- Page 377 and 378:
Sección 13.4 Automatización de su
- Page 379 and 380:
Bibliografía 369 Valoración autom
- Page 381:
EJERCICIO DE PROGRAMACIÓN (PARTE 1
- Page 384 and 385:
APÉNDICE B Convenciones de los 24
- Page 386 and 387:
376 Apéndice B Convenciones de los
- Page 389 and 390:
Soluciones de ejercicios selecciona
- Page 391 and 392:
5.8) El jacobiano de este manipulad
- Page 393 and 394:
Soluciones a los ejercicios selecci
- Page 395:
Soluciones a los ejercicios selecci
- Page 398 and 399:
388 Índice con pernos, 254 de ajus
- Page 400 and 401:
390 Índice Enseñar y reproducir,
- Page 402 and 403:
392 Índice manipulador Cartesiano
- Page 404 and 405:
394 Índice repetitividad de, 127 s
- Page 406 and 407:
396 Índice alineación de la pieza
- Page 408 and 409:
398 Índice Robusto, controlador, 2
- Page 410:
400 Índice Una sola entrada, una s