Toyota Toyota Touch & Go - PZ490-00331-*0 - Toyota Touch & Go - Toyota Touch & Go Plus - Turkish - mode d'emploi
Toyota Toyota Touch & Go - PZ490-00331-*0 - Toyota Touch & Go - Toyota Touch & Go Plus - Turkish - mode d'emploi
Toyota Toyota Touch & Go - PZ490-00331-*0 - Toyota Touch & Go - Toyota Touch & Go Plus - Turkish - mode d'emploi

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3. ROTA YÖNLENDİRMESİ<br />
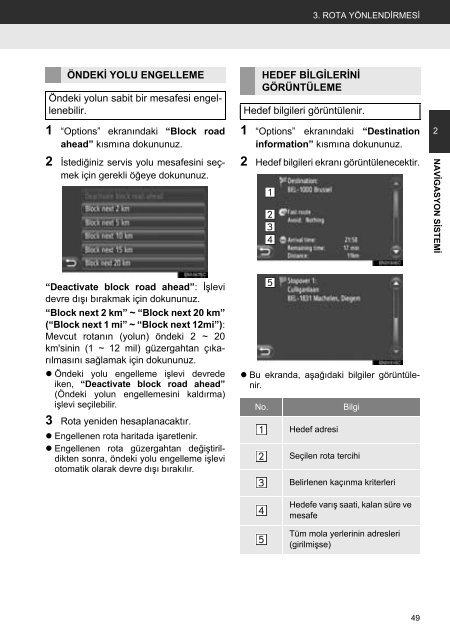
ÖNDEKİ YOLU ENGELLEME<br />
Öndeki yolun sabit bir mesafesi engellenebilir.<br />
1 “Options” ekranındaki “Block road<br />
ahead” kısmına dokununuz.<br />
HEDEF BİLGİLERİNİ<br />
GÖRÜNTÜLEME<br />
Hedef bilgileri görüntülenir.<br />
1 “Options” ekranındaki “Destination<br />
information” kısmına dokununuz.<br />
2<br />
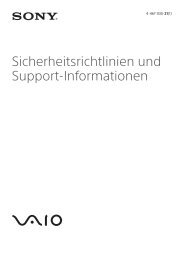
2 İstediğiniz servis yolu mesafesini seçmek<br />
için gerekli öğeye dokununuz.<br />
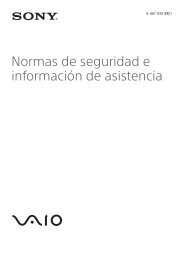
2 Hedef bilgileri ekranı görüntülenecektir.<br />
NAVİGASYON SİSTEMİ<br />
“Deactivate block road ahead”: İşlevi<br />
devre dışı bırakmak için dokununuz.<br />
“Block next 2 km” ~ “Block next 20 km”<br />
(“Block next 1 mi” ~ “Block next 12mi”):<br />
Mevcut rotanın (yolun) öndeki 2 ~ 20<br />
km'sinin (1 ~ 12 mil) güzergahtan çıkarılmasını<br />
sağlamak için dokununuz.<br />
• Öndeki yolu engelleme işlevi devrede<br />
iken, “Deactivate block road ahead”<br />
(Öndeki yolun engellemesini kaldırma)<br />
işlevi seçilebilir.<br />
3 Rota yeniden hesaplanacaktır.<br />
• Engellenen rota haritada işaretlenir.<br />
• Engellenen rota güzergahtan değiştirildikten<br />
sonra, öndeki yolu engelleme işlevi<br />
otomatik olarak devre dışı bırakılır.<br />
• Bu ekranda, aşağıdaki bilgiler görüntülenir.<br />
No.<br />
Hedef adresi<br />
Bilgi<br />
Seçilen rota tercihi<br />
Belirlenen kaçınma kriterleri<br />
Hedefe varış saati, kalan süre ve<br />
mesafe<br />
Tüm mola yerlerinin adresleri<br />
(girilmişse)<br />
49