

An Image Processing System For Visual Servoing of Soccer Robot
An Image Processing System For Visual Servoing of Soccer Robot
An Image Processing System For Visual Servoing of Soccer Robot

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
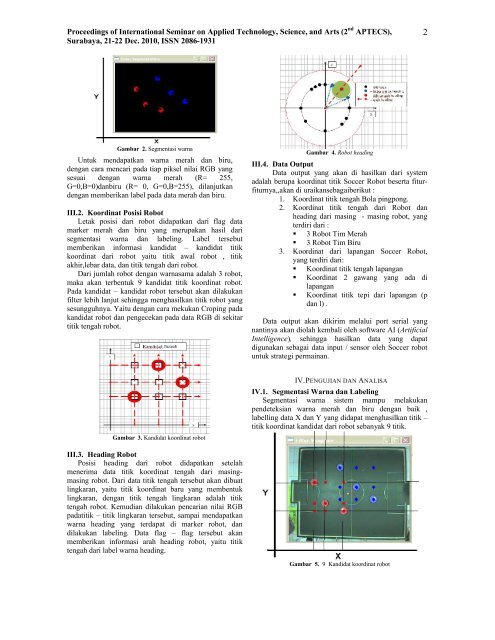
Proceedings <strong>of</strong> International Seminar on Applied Technology, Science, and Arts (2 nd APTECS),Surabaya, 21-22 Dec. 2010, ISSN 2086-19312Gambar 2. Segmentasi warnaUntuk mendapatkan warna merah dan biru,dengan cara mencari pada tiap piksel nilai RGB yangsesuai dengan warna merah (R= 255,G=0,B=0)danbiru (R= 0, G=0,B=255), dilanjutkandengan memberikan label pada data merah dan biru.III.2. Koordinat Posisi <strong>Robot</strong>Letak posisi dari robot didapatkan dari flag datamarker merah dan biru yang merupakan hasil darisegmentasi warna dan labeling. Label tersebutmemberikan informasi kandidat – kandidat titikkoordinat dari robot yaitu titik awal robot , titikakhir,lebar data, dan titik tengah dari robot.Dari jumlah robot dengan warnasama adalah 3 robot,maka akan terbentuk 9 kandidat titik koordinat robot.Pada kandidat – kandidat robot tersebut akan dilakukanfilter lebih lanjut sehingga menghasilkan titik robot yangsesungguhnya. Yaitu dengan cara mekukan Croping padakandidat robot dan pengecekan pada data RGB di sekitartitik tengah robot.Gambar 4. <strong>Robot</strong> headingIII.4. Data OutputData output yang akan di hasilkan dari systemadalah berupa koordinat titik <strong>Soccer</strong> <strong>Robot</strong> beserta fiturfiturnya,,akandi uraikansebagaiberikut :1. Koordinat titik tengah Bola pingpong.2. Koordinat titik tengah dari <strong>Robot</strong> danheading dari masing - masing robot, yangterdiri dari :• 3 <strong>Robot</strong> Tim Merah• 3 <strong>Robot</strong> Tim Biru3. Koordinat dari lapangan <strong>Soccer</strong> <strong>Robot</strong>,yang terdiri dari:• Koordinat titik tengah lapangan• Koordinat 2 gawang yang ada dilapangan• Koordinat titik tepi dari lapangan (pdan l) .Data output akan dikirim melalui port serial yangnantinya akan diolah kembali oleh s<strong>of</strong>tware AI (ArtificialIntelligence), sehingga hasilkan data yang dapatdigunakan sebagai data input / sensor oleh <strong>Soccer</strong> robotuntuk strategi permainan.Gambar 3. Kandidat koordinat robotIV.PENGUJIAN DAN ANALISAIV.1. Segmentasi Warna dan LabelingSegmentasi warna sistem mampu melakukanpendeteksian warna merah dan biru dengan baik ,labelling data X dan Y yang didapat menghasilkan titik –titik koordinat kandidat dari robot sebanyak 9 titik.III.3. Heading <strong>Robot</strong>Posisi heading dari robot didapatkan setelahmenerima data titik koordinat tengah dari masingmasingrobot. Dari data titik tengah tersebut akan dibuatlingkaran, yaitu titik koordinat baru yang membentuklingkaran, dengan titik tengah lingkaran adalah titiktengah robot. Kemudian dilakukan pencarian nilai RGBpadatitik – titik lingkaran tersebut, sampai mendapatkanwarna heading yang terdapat di marker robot, dandilakukan labeling. Data flag – flag tersebut akanmemberikan informasi arah heading robot, yaitu titiktengah dari label warna heading.Gambar 5. 9 Kandidat koordinat robot













