

Una gamma di robot a quattro e sei assi
Una gamma di robot a quattro e sei assi
Una gamma di robot a quattro e sei assi

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
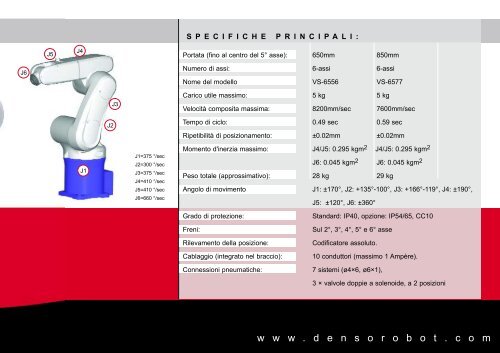
J6<br />
J5<br />
J4<br />
J1<br />
J2<br />
J3<br />
J1=375 °/sec<br />
J2=300 °/sec<br />
J3=375 °/sec<br />
J4=410 °/sec<br />
J5=410 °/sec<br />
J6=660 °/sec<br />
S p E C I f I C H E p R I n C I p A l I :<br />
Portata (fino al centro del 5° asse): 650mm 850mm<br />
Numero <strong>di</strong> <strong>assi</strong>: 6-<strong>assi</strong> 6-<strong>assi</strong><br />
Nome del modello VS-6556 VS-6577<br />
Carico utile m<strong>assi</strong>mo: 5 kg 5 kg<br />
Velocità composita m<strong>assi</strong>ma: 8200mm/sec 7600mm/sec<br />
Tempo <strong>di</strong> ciclo: 0.49 sec 0.59 sec<br />
Ripetibilità <strong>di</strong> posizionamento: ±0.02mm ±0.02mm<br />
Momento d'inerzia m<strong>assi</strong>mo: J4/J5: 0.295 kgm 2 J4/J5: 0.295 kgm 2<br />
J6: 0.045 kgm 2 J6: 0.045 kgm 2<br />
Peso totale (approssimativo): 28 kg 29 kg<br />
Angolo <strong>di</strong> movimento J1: ±170°, J2: +135°-100°, J3: +166°-119°, J4: ±190°,<br />
J5: ±120°, J6: ±360°<br />
Grado <strong>di</strong> protezione: Standard: IP40, opzione: IP54/65, CC10<br />
Freni: Sul 2°, 3°, 4°, 5° e 6° asse<br />
Rilevamento della posizione: Co<strong>di</strong>ficatore assoluto.<br />
Cablaggio (integrato nel braccio): 10 conduttori (m<strong>assi</strong>mo 1 Ampère).<br />
Connessioni pneumatiche: 7 sistemi (ø4×6, ø6×1),<br />
3 × valvole doppie a solenoide, a 2 posizioni<br />
w w w . d e n s o r o b o t . c o m