

Cart-Pendulum System í¼ëë°± ì ì´ê¸° ì¤ê³ - íêµíê³µëíêµ
Cart-Pendulum System í¼ëë°± ì ì´ê¸° ì¤ê³ - íêµíê³µëíêµ
Cart-Pendulum System í¼ëë°± ì ì´ê¸° ì¤ê³ - íêµíê³µëíêµ

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
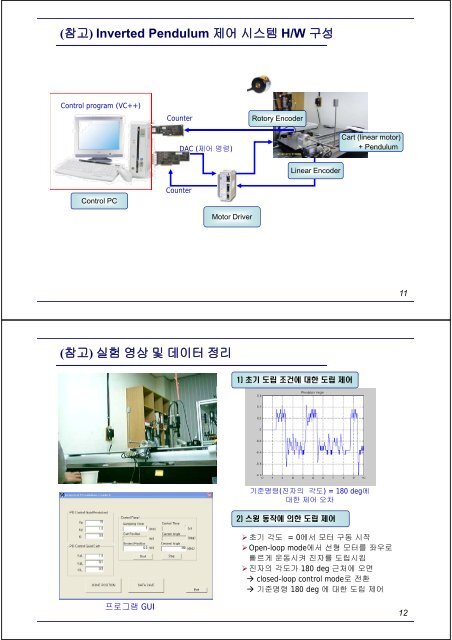
(참고) Inverted <strong>Pendulum</strong> 제어 시스템 H/W 구성Control program (VC++)CounterRotory EncoderDAC (제어 명령)<strong>Cart</strong> (linear motor)+ <strong>Pendulum</strong>Linear EncoderControl PCCounterMotor Driver11(참고) 실험 영상 및 데이터 정리1) 초기 도립 조건에 대한 도립 제어기준명령(진자의 각도) = 180 deg에대한 제어 오차2) 스윙 동작에 의한 도립 제어‣ 초기 각도 = 0에서 모터 구동 시작‣ Open-loop p mode에서 선형 모터를 좌우로빠르게 운동시켜 진자를 도립시킴‣ 진자의 각도가 180 deg 근처에 오면 closed-loop control mode로 전환 기준명령 180 deg 에 대한 도립 제어프로그램 GUI12


