


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
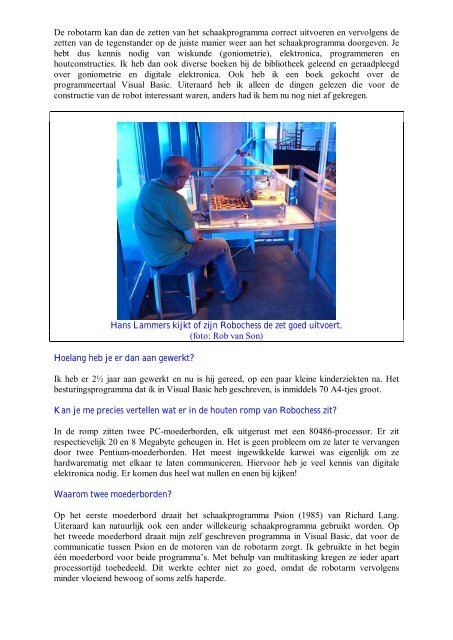
De robotarm kan dan de zetten van het schaakprogramma correct uitvoeren en vervolgens dezetten van de tegenstander op de juiste manier weer aan het schaakprogramma doorgeven. Jehebt dus kennis nodig van wiskunde (goniometrie), elektronica, programmeren enhoutconstructies. Ik heb dan ook diverse boeken bij de bibliotheek gel<strong>een</strong>d en geraadpleegdover goniometrie en digitale elektronica. Ook heb ik <strong>een</strong> boek gekocht over deprogrammeertaal Visual Basic. Uiteraard heb ik all<strong>een</strong> de dingen gelezen die voor deconstructie van de robot interessant waren, anders had ik hem nu nog niet af gekregen.Hans Lammers kijkt of zijn <strong>Robochess</strong> de zet goed uitvoert.(foto: Rob van Son)Hoelang heb je er dan aan gewerkt?Ik heb er 2½ jaar aan gewerkt en nu is hij gereed, op <strong>een</strong> paar kleine kinderziekten na. Hetbesturingsprogramma dat ik in Visual Basic heb geschreven, is inmiddels 70 A4-tjes groot.Kan je me precies vertellen wat er in de houten romp van <strong>Robochess</strong> zit?In de romp zitten twee PC-moederborden, elk uitgerust met <strong>een</strong> 80486-processor. Er zitrespectievelijk 20 en 8 Megabyte geheugen in. Het is g<strong>een</strong> probleem om ze later te vervangendoor twee Pentium-moederborden. Het meest ingewikkelde karwei was eigenlijk om zehardwarematig met elkaar te laten communiceren. Hiervoor heb je veel kennis van digitaleelektronica nodig. Er komen dus heel wat nullen en enen bij kijken!Waarom twee moederborden?Op het eerste moederbord draait het schaakprogramma Psion (1985) van Richard Lang.Uiteraard kan natuurlijk ook <strong>een</strong> ander willekeurig schaakprogramma gebruikt worden. Ophet tweede moederbord draait mijn zelf geschreven programma in Visual Basic, dat voor decommunicatie tussen Psion en de motoren van de robotarm zorgt. Ik gebruikte in het beginéén moederbord voor beide programma’s. Met behulp van multitasking kregen ze ieder apartprocessortijd toebedeeld. Dit werkte echter niet zo goed, omdat de robotarm vervolgensminder vloeiend bewoog of soms zelfs haperde.
![01-1981 [E-4551] Applied Concepts - Morphy Encore Na het ...](https://img.yumpu.com/51220743/1/184x260/01-1981-e-4551-applied-concepts-morphy-encore-na-het-.jpg?quality=85)
![10-1987 [H-1501] VEB Mikroelektronik Erfurt - Chess-Master Diamond](https://img.yumpu.com/51155071/1/184x260/10-1987-h-1501-veb-mikroelektronik-erfurt-chess-master-diamond.jpg?quality=85)

![04-1984 [L-1701] Novag - Presto Novag Art. No. 8210. Een compact ...](https://img.yumpu.com/50703692/1/184x260/04-1984-l-1701-novag-presto-novag-art-no-8210-een-compact-.jpg?quality=85)

![11-1982 [E-4151] Fidelity - Voice Bridge Challenger III Fidelity ...](https://img.yumpu.com/50359671/1/184x260/11-1982-e-4151-fidelity-voice-bridge-challenger-iii-fidelity-.jpg?quality=85)
![09-1980 [E-3901] Fidelity - Challenger Printer Model: FP. Een zeer ...](https://img.yumpu.com/50108260/1/184x260/09-1980-e-3901-fidelity-challenger-printer-model-fp-een-zeer-.jpg?quality=85)


![08-1983 [G-1001] Milton Bradley - Schaakcomputers en ...](https://img.yumpu.com/49507203/1/184x260/08-1983-g-1001-milton-bradley-schaakcomputers-en-.jpg?quality=85)
![10-1981 [E-4351] SciSys - Strong Play Plus (Sensor Chess module ...](https://img.yumpu.com/49350295/1/184x260/10-1981-e-4351-scisys-strong-play-plus-sensor-chess-module-.jpg?quality=85)
