Rezonanční řízení krokového motoru – polomost - Free Energy
Rezonanční řízení krokového motoru – polomost - Free Energy
Rezonanční řízení krokového motoru – polomost - Free Energy

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
R4<br />
Rser=0<br />
V2<br />
24<br />
500<br />
L3<br />
-12V +12V<br />
V1<br />
V3<br />
12V<br />
12V<br />
+12V<br />
X1<br />
V+<br />
VCC<br />
OUT<br />
IN<br />
GND<br />
SWITCH-HL<br />
.1082<br />
K1 L1 L3 .6<br />
L1<br />
+12V<br />
U1<br />
-12V<br />
.1082<br />
R1<br />
1Meg<br />
R2<br />
5k6<br />
C1<br />
10µ<br />
-12V<br />
U2<br />
R3<br />
2.2<br />
+12V<br />
X2<br />
V+<br />
VCC<br />
OUT<br />
IN<br />
GND<br />
SWITCH-HL<br />
.TRAN .5 UIC<br />
.ic I(L1) = .5<br />
10µ<br />
L2<br />
.1082<br />
C2<br />
+12V<br />
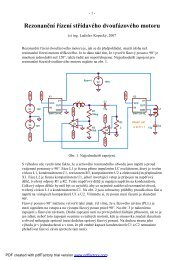
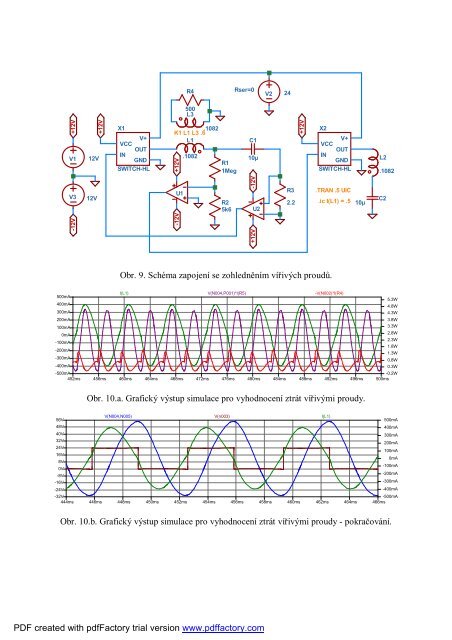
Obr. 9. Schéma zapojení se zohledněním vířivých proudů.<br />
500mA<br />
400mA<br />
300mA<br />
200mA<br />
100mA<br />
0mA<br />
-100mA<br />
-200mA<br />
-300mA<br />
-400mA<br />
I(L1) V(N004,P001)*I(R5) -V(N002)*I(R4)<br />
-500mA<br />
-0.2W<br />
452ms 456ms 460ms 464ms 468ms 472ms 476ms 480ms 484ms 488ms 492ms 496ms 500ms<br />
5.3W<br />
4.8W<br />
4.3W<br />
3.8W<br />
3.3W<br />
2.8W<br />
2.3W<br />
1.8W<br />
1.3W<br />
0.8W<br />
0.3W<br />
Obr. 10.a. Grafický výstup simulace pro vyhodnocení ztrát vířivými proudy.<br />
56V<br />
V(N004,N005) V(n003) I(L1)<br />
500mA<br />
48V<br />
400mA<br />
40V<br />
300mA<br />
32V<br />
200mA<br />
24V<br />
100mA<br />
16V<br />
0mA<br />
8V<br />
0V<br />
-100mA<br />
-8V<br />
-200mA<br />
-16V<br />
-300mA<br />
-24V<br />
-400mA<br />
-32V<br />
-500mA<br />
444ms 446ms 448ms 450ms 452ms 454ms 456ms 458ms 460ms 462ms 464ms 466ms<br />
Obr. 10.b. Grafický výstup simulace pro vyhodnocení ztrát vířivými proudy - pokračování.<br />
PDF created with pdfFactory trial version www.pdffactory.com