problema sobre vibraciones - MecFunNet
problema sobre vibraciones - MecFunNet
problema sobre vibraciones - MecFunNet

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
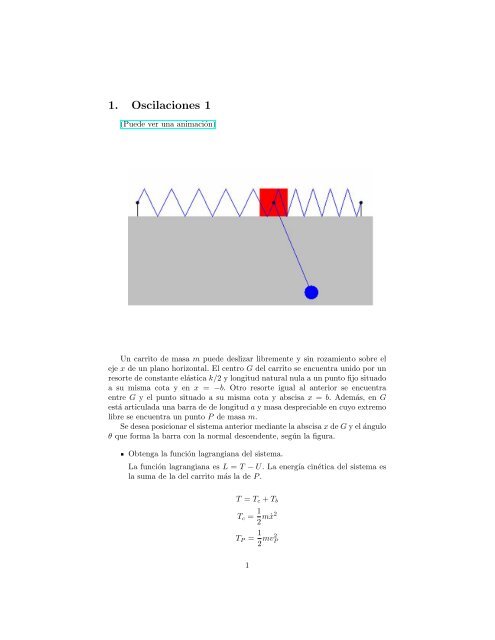
1. Oscilaciones 1<br />
(Puede ver una animación)<br />
Un carrito de masa m puede deslizar libremente y sin rozamiento <strong>sobre</strong> el<br />
eje x de un plano horizontal. El centro G del carrito se encuentra unido por un<br />
resorte de constante elástica k/2 y longitud natural nula a un punto fijo situado<br />
a su misma cota y en x = −b. Otro resorte igual al anterior se encuentra<br />
entre G y el punto situado a su misma cota y abscisa x = b. Además, en G<br />
está articulada una barra de de longitud a y masa despreciable en cuyo extremo<br />
libre se encuentra un punto P de masa m.<br />
Se desea posicionar el sistema anterior mediante la abscisa x de G y el ángulo<br />
θ que forma la barra con la normal descendente, según la figura.<br />
Obtenga la función lagrangiana del sistema.<br />
La función lagrangiana es L = T − U. La energía cinética del sistema es<br />
la suma de la del carrito más la de P .<br />
T = T c + T b<br />
T c = 1 2 mẋ2<br />
T P = 1 2 mv2 P<br />
1
Para calcular v P se hace<br />
x P = x + a sen θ ⇒ ẋ c = ẋ + a ˙θ cos θ<br />
con lo que<br />
de modo que<br />
y P = −a cos θ ⇒ ẏ c = a ˙θ sen θ<br />
v 2 P = ẋ 2 + a 2 ˙θ2 + 2aẋ ˙θ cos θ<br />
T = 1 2 mẋ2 + 1 (ẋ<br />
2 m 2 + a 2 ˙θ2 + 2aẋ ˙θ<br />
)<br />
cos θ<br />
El potencial queda<br />
con lo que<br />
T = 1 (2ẋ<br />
2 m 2 + a 2 ˙θ2 + 2maẋ ˙θ<br />
)<br />
cos θ<br />
U = −mga cos θ + 1 2 kx2<br />
L = 1 (2ẋ<br />
2 m 2 + a 2 ˙θ2 + 2maẋ ˙θ<br />
)<br />
cos θ + mga cos θ − 1 2 kx2<br />
Obtenga las posiciones de equilibrio del sistema<br />
Al aplicar las ecuaciones de Lagrange se tiene<br />
2mẍ + 2ma d( ˙θ cos θ)<br />
dt<br />
= −kx<br />
ma 2 d(ẋ cos θ)<br />
¨θ + 2ma = −mga sen θ<br />
dt<br />
y existe una posición de equilibrio estable en x = 0; θ = 0 y otra inestable<br />
en x = 0; θ = π.<br />
Linealice las ecuaciones diferenciales que rigen la evolución del sistema en<br />
torno al punto de equilibrio estable.<br />
2mẍ + ma¨θ = −kx<br />
ma 2 ¨θ + maẍ = −mgaθ<br />
Encuentre las frecuencias de vibración para la posición de equilibrio estable<br />
con los valores m = 1kg, a = 1m, g = 10ms −2<br />
Al sustituir soluciones del tipo<br />
x = A 1 cos ωt<br />
θ = A 2 cos ωt<br />
2
se tiene<br />
−(2mA 1 + maA 2 )ω 2 + kA 1 = 0<br />
−(ma 2 A 2 + maA 1 )ω 2 + mgaA 2 = 0<br />
Sistema que sólo admite soluciones no triviales si<br />
k<br />
∆ =<br />
m<br />
∣<br />
− ∣ 2ω2 −aω 2 ∣∣∣<br />
−aω 2 ga − a 2 ω 2 = 0<br />
Si se hace m = 1kg, a = 1m, g = 10ms −2 entonces se tiene en el S.I.<br />
∆ =<br />
∣ k − ∣ 2ω2 −ω 2 ∣∣∣<br />
−ω 2 10 − ω 2 = 0<br />
lo que proporciona las pulsaciones<br />
ω 2 = 10 + k 2 ± √ 100 + k2<br />
4<br />
Describa los modos normales de oscilación del sistema.<br />
De la primera ecuación del sistema, se tiene<br />
A 2 = − 20 ± √ k 2 + 400<br />
ω 2 A 1<br />
Por lo que el primer modo de oscilación corresponde a <strong>vibraciones</strong> del tipo<br />
y el segundo modo se expresa por<br />
x(t) = A 1 cos ω 1 t<br />
θ(t) = − 20 + √ k 2 + 400<br />
ω 2 A 1 cos ω 1 t<br />
x(t) = A 1 cos ω 2 t<br />
θ(t) = − 20 − √ k 2 + 400<br />
ω 2 A 1 cos ω 1 t<br />
Obtenga las pulsaciones si se hace k = 10N/m.<br />
Entonces<br />
ω 1 = 5, 11s −1<br />
ω 2 = 1, 95s −1<br />
3