

EX 1 : Un lapin désire traverser une route de 4 mètres de largeur ...
EX 1 : Un lapin désire traverser une route de 4 mètres de largeur ...
EX 1 : Un lapin désire traverser une route de 4 mètres de largeur ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
TS. DM2 - Correction ♣<br />
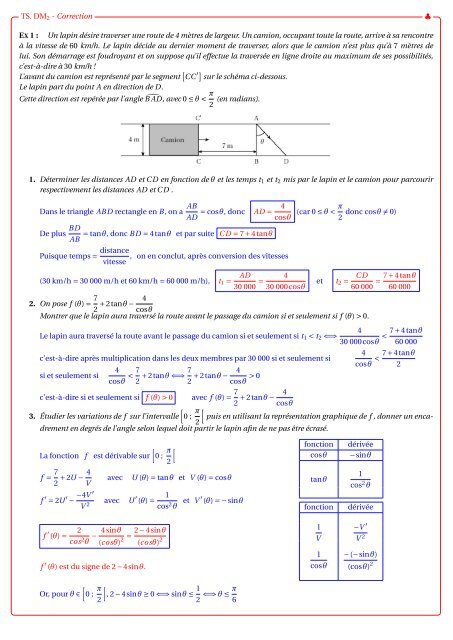
<strong>EX</strong> 1 : <strong>Un</strong> <strong>lapin</strong> <strong>désire</strong> <strong>traverser</strong> <strong>une</strong> <strong>route</strong> <strong>de</strong> 4 <strong>mètres</strong> <strong>de</strong> <strong>largeur</strong>. <strong>Un</strong> camion, occupant toute la <strong>route</strong>, arrive à sa rencontre<br />
à la vitesse <strong>de</strong> 60 km/h. Le <strong>lapin</strong> déci<strong>de</strong> au <strong>de</strong>rnier moment <strong>de</strong> <strong>traverser</strong>, alors que le camion n’est plus qu’à 7 <strong>mètres</strong> <strong>de</strong><br />
lui. Son démarrage est foudroyant et on suppose qu’il effectue la traversée en ligne droite au maximum <strong>de</strong> ses possibilités,<br />
c’est-à-dire à 30 km/h !<br />
L’avant du camion est représenté par le segment CC ′ sur le schéma ci-<strong>de</strong>ssous.<br />
Le <strong>lapin</strong> part du point A en direction <strong>de</strong> D.<br />
Cette direction est repérée par l’angle B AD, avec 0 ≤ θ < π<br />
(en radians).<br />
2<br />
1. Déterminer les distances AD et C D en fonction <strong>de</strong> θ et les temps t1 et t2 mis par le <strong>lapin</strong> et le camion pour parcourir<br />
respectivement les distances AD et C D .<br />
Dans le triangle ABD rectangle en B, on a AB<br />
4<br />
= cosθ, donc AD =<br />
AD cosθ<br />
De plus BD<br />
= tanθ, donc BD = 4tanθ et par suite C D = 7 + 4tanθ<br />
AB<br />
Puisque temps = distance<br />
, on en conclut, après conversion <strong>de</strong>s vitesses<br />
vitesse<br />
(30 km/h = 30 000 m/h et 60 km/h = 60 000 m/h), t1 = AD<br />
30 000 =<br />
4<br />
30 000cosθ<br />
π<br />
(car 0 ≤ θ < donc cosθ = 0)<br />
2<br />
C D<br />
et t2 =<br />
60 000<br />
2. On pose f (θ) = 7<br />
4<br />
+ 2tanθ −<br />
2 cosθ<br />
Montrer que le <strong>lapin</strong> aura traversé la <strong>route</strong> avant le passage du camion si et seulement si f (θ) > 0.<br />
4<br />
Le <strong>lapin</strong> aura traversé la <strong>route</strong> avant le passage du camion si et seulement si t1 < t2 ⇐⇒<br />
30 000cosθ<br />
c’est-à-dire après multiplication dans les <strong>de</strong>ux membres par 30 000 si et seulement si<br />
si et seulement si<br />
4<br />
cosθ<br />
7<br />
7<br />
4<br />
< + 2tanθ ⇐⇒ + 2tanθ − > 0<br />
2 2 cosθ<br />
4<br />
cosθ<br />
= 7 + 4tanθ<br />
60 000<br />
< 7 + 4tanθ<br />
60 000<br />
< 7 + 4tanθ<br />
2<br />
c’est-à-dire si et seulement si f (θ) > 0 avec f (θ) = 7<br />
4<br />
+ 2tanθ −<br />
2 cosθ<br />
<br />
3. Étudier les variations <strong>de</strong> f sur l’intervalle 0 ; π<br />
<br />
puis en utilisant la représentation graphique <strong>de</strong> f , donner un enca-<br />
2<br />
drement en <strong>de</strong>grés <strong>de</strong> l’angle selon lequel doit partir le <strong>lapin</strong> afin <strong>de</strong> ne pas être écrasé.<br />
La fonction f<br />
<br />
est dérivable sur 0 ; π<br />
<br />
2<br />
f = 7 4<br />
+ 2U −<br />
2 V<br />
avec U (θ) = tanθ et V (θ) = cosθ<br />
f ′ = 2U ′ −<br />
−4V ′<br />
V 2<br />
f ′ (θ) = 2<br />
cos 2 θ<br />
avec U ′ (θ) = 1<br />
cos 2 θ et V ′ (θ) = −sinθ<br />
4sinθ 2 − 4sinθ<br />
− =<br />
2<br />
(cosθ) (cosθ) 2<br />
f ′ (θ) est du signe <strong>de</strong> 2 − 4sinθ.<br />
<br />
Or, pour θ ∈<br />
0 ; π<br />
2<br />
<br />
, 2 − 4sinθ ≥ 0 ⇐⇒ sinθ ≤ 1 π<br />
⇐⇒ θ ≤<br />
2 6<br />
fonction dérivée<br />
cosθ −sinθ<br />
tanθ<br />
1<br />
cos 2 θ<br />
fonction dérivée<br />
1<br />
V<br />
1<br />
cosθ<br />
−V ′<br />
V 2<br />
−(−sinθ)<br />
(cosθ) 2
TS. DM2 - Correction ♣<br />
<br />
3. Or, pour θ ∈<br />
θ<br />
f ′ (θ)<br />
f (θ)<br />
0.1<br />
0<br />
−0.1<br />
−0.2<br />
−0.3<br />
−0.4<br />
−0.5<br />
−0.6<br />
−0.7<br />
0 ; π<br />
2<br />
0<br />
−1<br />
2<br />
<br />
, 2 − 4sinθ ≥ 0 ⇐⇒ sinθ ≤ 1 π<br />
⇐⇒ θ ≤<br />
2 6<br />
θ1<br />
0<br />
π<br />
6<br />
+ 0 −<br />
0,036<br />
θ2<br />
0<br />
π<br />
6<br />
−∞<br />
π<br />
2<br />
<br />
d’où le tableau <strong>de</strong>s variations <strong>de</strong> f sur<br />
f (θ) = 7 2sinθ − 4<br />
+<br />
2 cosθ<br />
f (0) = 7 4<br />
− = −1<br />
2 cos0 2<br />
lim<br />
θ→ π<br />
2<br />
θ< π<br />
2<br />
f (θ) = 7<br />
2<br />
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
θ1<br />
+ lim<br />
θ→ π<br />
2<br />
θ< π<br />
2<br />
f (θ)<br />
Comme le suggère le graphique f (θ) > 0 si et seulement si 0,4 ≤ θ ≤ 0,64 environ,<br />
soit si l’angle mesure entre 23 ◦ et 37 ◦ environ.<br />
θ2<br />
0 ; π<br />
2<br />
<br />
:<br />
<br />
π<br />
<br />
et f 0,036<br />
6<br />
2sin π<br />
2 − 4 7<br />
=<br />
cosθ 2<br />
+ lim<br />
θ→ π<br />
2<br />
θ< π<br />
2<br />
−2<br />
= −∞<br />
cosθ<br />
θ

