

Séquence 08 : Vecteurs Définition – Somme – Relation de Chasles
Séquence 08 : Vecteurs Définition – Somme – Relation de Chasles
Séquence 08 : Vecteurs Définition – Somme – Relation de Chasles

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
I. <strong>Vecteurs</strong> et translations<br />
1. Translation <strong>de</strong> vecteur<br />
<strong>Séquence</strong> <strong>08</strong> : <strong>Vecteurs</strong><br />
<strong>Définition</strong> <strong>–</strong> <strong>Somme</strong> <strong>–</strong> <strong>Relation</strong> <strong>de</strong> <strong>Chasles</strong><br />
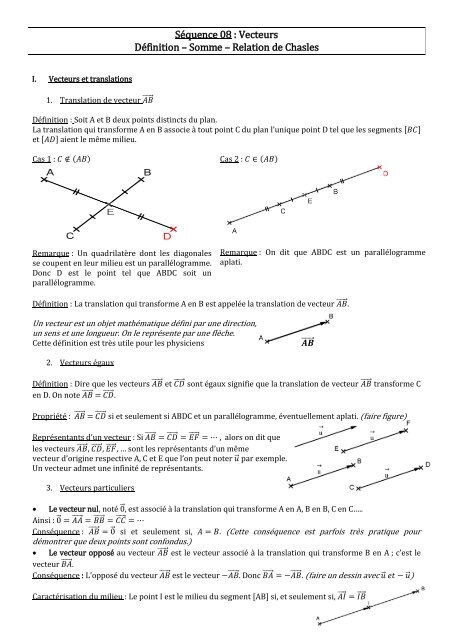
<strong>Définition</strong> : Soit A et B <strong>de</strong>ux points distincts du plan.<br />
La translation qui transforme A en B associe à tout point C du plan l’unique point D tel que les segments<br />
et aient le même milieu.<br />
Cas 1 :<br />
Remarque : Un quadrilatère dont les diagonales<br />
se coupent en leur milieu est un parallélogramme.<br />
Donc D est le point tel que ABDC soit un<br />
parallélogramme.<br />
Cas 2 :<br />
Remarque : On dit que ABDC est un parallélogramme<br />
aplati.<br />
<strong>Définition</strong> : La translation qui transforme A en B est appelée la translation <strong>de</strong> vecteur<br />
Un vecteur est un objet mathématique défini par une direction,<br />
un sens et une longueur. On le représente par une flèche.<br />
Cette définition est très utile pour les physiciens<br />
2. <strong>Vecteurs</strong> égaux<br />
<strong>Définition</strong> : Dire que les vecteurs<br />
en D. On note = .<br />
Propriété :<br />
=<br />
et<br />
sont égaux signifie que la translation <strong>de</strong> vecteur<br />
.<br />
transforme C<br />
si et seulement si ABDC et un parallélogramme, éventuellement aplati. (faire figure)<br />
Représentants d’un vecteur : Si<br />
alors on dit que<br />
les vecteurs , , … sont les représentants d’un même<br />
vecteur d’origine respective A C et E que l’on peut noter par exemple.<br />
Un vecteur admet une infinité <strong>de</strong> représentants.<br />
3. <strong>Vecteurs</strong> particuliers<br />
Le vecteur nul, noté est associé à la translation qui transforme A en A B en B C en C…..<br />
Ainsi :<br />
Conséquence : si et seulement si, . (Cette conséquence est parfois très pratique pour<br />
démontrer que <strong>de</strong>ux points sont confondus.)<br />
Le vecteur opposé au vecteur est le vecteur associé à la translation qui transforme B en A ; c’est le<br />
vecteur .<br />
Conséquence : L’opposé du vecteur est le vecteur . Donc<br />
. (faire un <strong>de</strong>ssin avec )<br />
Caractérisation du milieu : Le point I est le milieu du segment [AB] si, et seulement si,
II. Coordonnées d’un vecteur<br />
1. Coordonnées d’un vecteur<br />
Dans cette partie, le plan est rapporté à un repère ; et est un<br />
vecteur donné non nul.<br />
La translation <strong>de</strong> vecteur associe au point O un unique point M<br />
tel que . On dit que le vecteur est le représentant du<br />
vecteur d’origine A.<br />
<strong>Définition</strong> : Les coordonnées du vecteur sont les coordonnées du point M tels que<br />
Exemple : Le vecteur a pour coordonnées ; .<br />
Les coordonnées d’un vecteur décrivent le déplacement qu’il représente. Ainsi un déplacement <strong>de</strong> unités<br />
vers la droite et <strong>de</strong> 3 unités vers le bas sera représenté par un vecteur <strong>de</strong> coordonnées ;<br />
Remarques :<br />
Les coordonnées du vecteur nul sont ; .<br />
Le repère ; se note aussi ; où<br />
Propriété : Deux vecteurs sont égaux si et seulement si ils ont les même coordonnées dans un repère.<br />
Autrement dit si dans un repère les vecteurs ont pour coordonnées respectives ; et ’ ; ’ alors :<br />
= ⇔<br />
. (la démonstration est immédiate avec la définition donnée plus haut)<br />
2. Coordonnées du vecteur<br />
Propriété : Dans un repère, soit et <strong>de</strong>ux points.<br />
Alors le vecteur<br />
a pour coordonnées<br />
Démonstration :<br />
Dans un repère ; , on note M le point tel que<br />
⇔ et ont le même milieu I.<br />
Or I milieu <strong>de</strong> ⇔<br />
Or I milieu <strong>de</strong> ⇔<br />
Ainsi,<br />
Or le vecteur<br />
⇔<br />
Exemple : Si ; et ;<br />
Alors le vecteur<br />
⇔<br />
⇔<br />
a pour coordonnées celles du point M c’est-à-dire<br />
a pour coordonnées<br />
.<br />
⇔<br />
soit<br />
et<br />
.<br />
.<br />
soit<br />
.<br />
.<br />
.
III. Addition <strong>de</strong> <strong>de</strong>ux vecteurs<br />
1. <strong>Somme</strong> <strong>de</strong> <strong>de</strong>ux vecteurs<br />
<strong>Définition</strong> : La somme <strong>de</strong> <strong>de</strong>ux vecteurs et est le vecteur associé à la translation résultant <strong>de</strong><br />
l’enchaînement <strong>de</strong>s translations <strong>de</strong> vecteur et <strong>de</strong> vecteur . On note ce vecteur + .<br />
Remarque : L’ordre <strong>de</strong> l’enchaînement n’a pas d’importance.<br />
Propriétés :<br />
+ = +<br />
+ = +<br />
( + ) + = u + ( + )<br />
<strong>Définition</strong> : On appelle différence <strong>de</strong> <strong>de</strong>ux vecteurs et<br />
le vecteur noté défini par : .<br />
Caractérisation du milieu : I est le milieu du segment [AB] si, et seulement si,<br />
Propriété : Soient les vecteurs<br />
Alors les coordonnées du vecteur sont<br />
2. Constructions géométriques<br />
et<br />
.<br />
et celle du vecteur sont<br />
Pour construire géométriquement la somme <strong>de</strong> <strong>de</strong>ux vecteurs et on peut utiliser l’une ou l’autre <strong>de</strong> ces<br />
<strong>de</strong>ux propriétés :<br />
Propriété : <strong>Relation</strong> <strong>de</strong> <strong>Chasles</strong> (1793 ; 1880 mathématicien français)<br />
Pour touts points A, B et C du plan : + .<br />
L’image du point A par la translation <strong>de</strong> vecteur est le point B.<br />
L’image du point B par la translation <strong>de</strong> vecteur est le point C.<br />
Donc l’image du point A par l’enchaînement <strong>de</strong>s translations <strong>de</strong> vecteur<br />
puis <strong>de</strong> vecteur<br />
.<br />
.<br />
est le point C.<br />
Remarque : Quand les <strong>de</strong>ux vecteurs sont représentés par <strong>de</strong>s flèches dont l’extrémité <strong>de</strong> l’une est l’origine<br />
<strong>de</strong> l’autre on utilise la relation <strong>de</strong> <strong>Chasles</strong>.<br />
Propriété : Règle du parallélogramme<br />
A, B et C étant trois points distincts non alignés,<br />
le point D tel que<br />
est le point tel que<br />
ABDC soit un parallélogramme.<br />
Remarque : Quand les <strong>de</strong>ux vecteurs sont représentés par <strong>de</strong>s flèches ayant la même origine, on trace le<br />
vecteur somme en traçant le parallélogramme.




