Manuel pour les produits ESU 51800, 51801 et ... - Maurienne Trains
Manuel pour les produits ESU 51800, 51801 et ... - Maurienne Trains
Manuel pour les produits ESU 51800, 51801 et ... - Maurienne Trains

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1. Aaa<br />
2. Bbb<br />
3. Ccc<br />
4. Ddd<br />
1. Déclaration de conformité<br />
<strong>Manuel</strong> <strong>pour</strong> <strong>les</strong> <strong>produits</strong> <strong>ESU</strong> <strong>51800</strong>, <strong>51801</strong> <strong>et</strong> 51802<br />
SwitchPilot, SwitchPilot Extension <strong>et</strong> SwitchPilot Servo.
<strong>ESU</strong> (Electronic Solutions Ulm) déclare que leur produit: SwitchPilot <strong>et</strong> SwitchPilot extension sont conforme selon:<br />
EN 71 1-3 : 188/6 : 1994-EN 50088 : 1996-EN 55014, partie 1 + partie 2 : 1993<br />
EN 61000-3-2 : 1995-EN 60742 : 1995-EN 61558-2-7 : 1998<br />
Le produit est fabriqué conforme:<br />
88/378/EWG-89/336/EWG-73/23/EWG<br />
2. Déclaration de recyclage.<br />
Ce symbole, sur l’appareil, le manuel <strong>et</strong> sur l’emballage vous informe que c<strong>et</strong> appareil ne peut pas être j<strong>et</strong>ter avec <strong>les</strong> ordures ménagères. L‘utilisateur doit<br />
s’accommoder des lois dans sont pays concernant le recyclage.<br />
Train Service Danckaert s’accorde avec <strong>ESU</strong>, le fabricant de l’ECoS, <strong>pour</strong> reprendre tous <strong>les</strong> appareils <strong>ESU</strong> arrivés en fin de vie <strong>et</strong> <strong>les</strong> renvoyer vers <strong>ESU</strong> en<br />
Allemagne. <strong>ESU</strong> prend soin <strong>pour</strong> le recyclage, conforme aux lois en Allemagne.<br />
Nous vous prions, à ce suj<strong>et</strong> de vouloir lire: www.modeltrainservice.com/reyclage.pdf<br />
Aussi vos accus doivent être recycler séparément, selon <strong>les</strong> lies de votre pays. Ceci est une tâche du consommateur.<br />
Copyright<br />
1998-2006 par <strong>ESU</strong> electronic solutions ulm GmbH & Co KG. Erreurs, changements qui servent le progrès technique, livraisons <strong>et</strong> tous droits réservés.<br />
Données techniques <strong>et</strong> illustrations sont propriété de <strong>ESU</strong>. Toutes responsabilités de dommage causé par l’emploie non conforme l’usage, comme décrit<br />
dans le mode d’emploie sera répudié. Ne convient pas aux enfants de moins de trois ans, à cause de p<strong>et</strong>ites pièces qu’ils peuvent avaler. En cas d’utilisation<br />
peu judicieuse, il y danger de se b<strong>les</strong>ser.<br />
Märklin est une marque déposé de la firme Gebr. Märklin und Cie. GmbH, Göppingen. Pour autres marques déposé voir manuel a-Allemands.<br />
<strong>ESU</strong> electronic solutions ulm GmbH & Co KG développe en continue, conforme à sa politique ces <strong>produits</strong>. <strong>ESU</strong> tient le droit de changer – sans préavis – ces<br />
appareils <strong>et</strong> manuels <strong>pour</strong> améliorer ces <strong>produits</strong>.<br />
5. Caractéristiques du SwitchPilot.<br />
Vous pouvez utiliser le SwitchPilot <strong>pour</strong> piloter des artic<strong>les</strong> magnétiques, lumières <strong>et</strong> autres consommateurs de votre réseau. Pour cela nous avons<br />
prévue 4 sorties double circuit <strong>pour</strong> piloter des article magnétiques (comme : aiguillages) ou 8 consommateurs comme des rails dételeur ou éclairage.<br />
Chaque sorti peut être déterminer comme sorti momentané, comme commutateur <strong>et</strong> comme clignotant. L’éclairage par ampoule ou LED. Un eff<strong>et</strong> ZOOM<br />
est une des possibilité qui vous offre un eff<strong>et</strong> véridique.
De plus vous pouvez connecter en piloter 2 moteurs servo.<br />
Le SwitchPilot sera brancher en direct sur votre système digital; soit il sera alimenter par un transfo externe courant alternatif ou courant continu.<br />
Le SwitchPilot est un décodeur Multi-Protocol qui peut être employer sur un système digital Märklin® Motorola® system (comme 6021 ou Central<br />
Station®) <strong>et</strong> aussi sur une centrale conforme DCC. Vous devez <strong>les</strong> piloter à travers <strong>les</strong> adresses qui sont prévue <strong>pour</strong> <strong>les</strong> artic<strong>les</strong> magnétiques. U dient de<br />
SwitchPilot “aan te spreken” via de adressen die voorzien zijn voor magne<strong>et</strong>artikelen. Grâce au système de rétro signalisation selon le DCC RailCom®, il<br />
est possible de communiquer la position de votre aiguillage à votre système digital. Un système digital, comme l’ECoS, vous donnera c<strong>et</strong>te info, même si<br />
vous avez changer l’aiguillage à la main.<br />
5.1 Caractéristiques du SwitchPilot Extension.<br />
Pour un propulsion d’aiguillage à moteur ou un conducteur croisement cœurs, vous avez besoin d’un kit de relais. Ceci est le SwitchPilot Extension.<br />
Chaque SwitchPilot Extension possède de 4 x 2 sortie relais, qui sont commuter en parallèle avec le SwitchPilot.<br />
6. Les sorties en détail.<br />
Le SwitchPilot a 8 sortie “transistor”, qui sont groupé en 4 groupe de 2.<br />
De SwitchPilot beschikt over 8 transistoruitgangen, dewelke in 4 dubbelgroepen gegroepeerd zijn. Chaque groupe a 2 sorties Out A <strong>et</strong> Out B. Puis nous<br />
apercevons sur le SwitchPilot encore 2 sorties servo. Chaque sortie ‘transistor’ peut être réglé comme commutateur u comme bouton – poussoir.<br />
Sortie impulsion.<br />
Vous avez la possibilité de programmer le temps de la commutation. Si vous pousser moins longtemps que le temps de commutation, le module<br />
respectera le temps programmé.<br />
Si vous poussez plus long que le temps prévue, le système tient compte de cela.<br />
En utilisant un temps de connection correcte, vous empêchez que <strong>les</strong> artic<strong>les</strong> magnétiques tombent en panne. Ce mode de fonctionnement est identique<br />
au décodeur Märklin® k83 (6083).<br />
Sortie continue.<br />
C’est en poussant sur le commutateur que vous activé la sortie Out A. Ceci reste active jusqu’à une suivante activation de ce commutateur. A ce moment<br />
Out B est activé. Out A <strong>et</strong> Out B se comportent comme un inverseur. Ce mode de fonctionnement est identique au décodeur Märklin® k84 (6084).<br />
Système clignotant.<br />
Dans ce mode <strong>les</strong> connections Out A <strong>et</strong> Out B sont activé en automatique alternée. Vous pouvez employer cela sur des passages à niveau (croix de<br />
Saint-André) Le temps du pulse peut être modifier.<br />
N’oublions pas que la consommation des éléments est 3 A maximum.
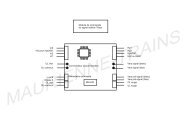
7. Modes de fonctionnement du SwitchPilot.<br />
Veuillez voir fig. 1.<br />
Fig. 1.<br />
Le SwitchPilot dispose d’un commutateur qui vous perm<strong>et</strong>s de choisir le mode désiré. Normalement vous n’avez pas besoin de programmation (user). Ce<br />
commutateur est valable <strong>pour</strong> <strong>les</strong> 4 double sorties transistor (1 à 4). Les sorties servo ne sont pas influencé par ce commutateur.<br />
7.1 Mode k83.<br />
Veuillez glisser le commutateur vers k83. de c<strong>et</strong>te façon <strong>les</strong> sorties 1 à 4 sont réglé en système de pulse. Le SwitchPilot se comporte un Märklin®<br />
k83. Veuillez employer ce mode <strong>pour</strong> des “moteurs” d’aiguillages traditionnels.<br />
7.2 Mode k84.<br />
Dans le mode k83 <strong>les</strong> sorties 1 à 4 sont réglé comme un interrupteur de lumière. Le SwitchPilot se comporte comme un Märklin® k84. Veuillez<br />
employer ce mode <strong>pour</strong> de l’éclairage, LEDs edm.<br />
7.3 Mode de programmation.<br />
Si vous glissez le commutateur (e) vers la position USER vous êtes en mode de programmation <strong>pour</strong> modifier <strong>les</strong> sorties 1 à 4..
8 Connection sur votre système digital.<br />
! Veuillez d’abord faire le réglage avant de connecter le SwitchPilot sur votre système digital..<br />
8.1. Les bornes du SwitchPilot / SwitchPilot Extension.<br />
Fig. 1 vous montre comment réunir le SwitchPilot <strong>et</strong> le SwitchPilot Extension.<br />
A: Branchez <strong>les</strong> signaux, <strong>les</strong> aiguillages, rails dételeur ou consommateurs similaire sur <strong>les</strong> connections vis des groupes 1 à 4. Les connections FBA <strong>et</strong> FBA<br />
sont <strong>les</strong> connections <strong>pour</strong> la rétro signalisation des aiguillages au SwitchPilot.<br />
B: Ici vous pouvez connecter <strong>les</strong> 2 moteurs servo. Nous pensons aux moteurs servo de Graupner®, Futaba® ou <strong>ESU</strong>. Ceci sont <strong>les</strong> sorties 5 <strong>et</strong> 6 du<br />
SwitchPilot.<br />
C: Au raccordements Pw A <strong>et</strong> Pw B vous raccordé la sortie digitale de votre centrale, ou un transformateur apart (= ou ≈).<br />
D: Les bornes Tr A <strong>et</strong> Tr B seront connecté sur le booster de votre système digital. Grâce a c<strong>et</strong>te connection le SwitchPilot reçoit ces ordres.<br />
E: Commutateur de mode. Vous faites le choix: mode k83, mode k84 of mode de programmation.<br />
F: LED de contrôle en mode de programmation.<br />
G: Interrupteur à poussoir <strong>pour</strong> régler l’adresse du SwitchPilot. Voir chapitre 9.3.<br />
H: fiche / contre fiche entre SwitchPilot <strong>et</strong> SwitchPilot Extension.<br />
I: Les sorties, maqué de 1 à 4 vous offrent <strong>les</strong> connections relais A <strong>et</strong> B qui seront piloter en parallèle au SwitchPilot. Chaque sortie correspond à une sortie<br />
égale numéroter du SwitchPilot. Si sortie A du SwitchPilot est active, alors <strong>les</strong> bornes 1 <strong>et</strong> COM de l’Extension sont relié. Si sortie B du SwitchPilot est active<br />
<strong>les</strong> bornes 2 <strong>et</strong> COM de l’Extension sont relié. Les sorties du relais (Extension) se comportent comme des sorties continues (dauer).<br />
8.2 Alimentation au système digital.<br />
Si votre réseau n’est pas trop grand, nous vous conseillons la connection comme en fig. 2.
Fig. 2. (« Zum Gleisausgang des Digitalsystems » => vers la sortie rail de votre système digital)<br />
Les connections vis Pw A <strong>et</strong> Pw B sont mis en parallè<strong>les</strong> de Trk A <strong>et</strong> respec. Trk B. Ceci mène vers la sortie rail de votre système digital.<br />
8.3 Alimentation séparé.<br />
8.4 Si vous avez un grand réseau, vous pouvez choisir <strong>pour</strong> une connection séparé. Vous déchargez la sortie booster/rail de votre système digital.<br />
N’employé que des transformateur qui sont prévue <strong>pour</strong> <strong>les</strong> réseaux de trains miniature. Veuillez tenir compte aux valeurs de chapitre 11, <strong>pour</strong> éviter<br />
des problèmes.<br />
Fig. 3.
8.4 Connection du SwitchPilot Extension.<br />
Le SwitchPilot Extension est brancher à gauche du SwitchPilot. Une connection à 8 broches sert en autre à l’alimentation. Voir fig. 1 svp.<br />
8.5 Connections des sorties.<br />
Fig. 4.<br />
8.5.1. Connection d’un ‘double-‘moteurs d’aiguillage.<br />
A connecter le file commun à la borne C du SwitchPilot.<br />
B le câble du premier moteur sera connecter à la borne Out A.<br />
C le câble du 2° moteur sera connecter à la borne Out B.<br />
Si votre aiguillage prend une position à l’envers, veuillez échanger <strong>les</strong> fils des sorties Out A <strong>et</strong> Out B.<br />
Même <strong>les</strong> aiguillage PECO peuvent être connecter sue un SwitchPilot. Si la consommations de ces aiguillages est haut, c’est possib<strong>les</strong> d’adapter le<br />
SwitchPilot à ceci. Voir chapitre 9.4.2.<br />
8.5.2. Connection d’un signale lumineux. (lampes ou LED’s).<br />
Si un signal lumineux est connecté, vous devez utiliser le mode continue. Si vous utilisez un signal lumineux aux ampou<strong>les</strong>, veuillez utilisez le schéma de fig.<br />
4, sortie 2. S’il concerne un signal lumineux au LED, n’oublier pas la résistance R, voir fig. 4, sorite 4.<br />
N’oubliez pas de vérifier si <strong>les</strong> mas est déjà équipé d’une résistance. Si ceci n’est pas le cas : la valeur est normalement entre 1 kOhm <strong>et</strong> 2,2 kOhm.
Les connections à vis C de chaque groupes de sorties sont du potentiel positive. Penez de connecter la cathode du LED à la connection Out A, respect. Out<br />
B<br />
8.5.3. Connection d’un aiguillage motorisé.<br />
Le SwitchPilot peut, à l’aide d’un SwitchPilot Extension aussi piloter des aiguillages motorisé. Grâce à une inversion de la tension le sens de marche du<br />
moteurs se déroule.<br />
N’employez que des moteurs de fin de course <strong>pour</strong> éviter de griller le moteur. Les sorties du SwitchPilot soutiennent la tensions vers le consommateur.<br />
Connection visualisé en fig. 5.<br />
Les fils marqué avec + <strong>et</strong> – doivent être connecter sur une alimentation continu (=).<br />
Fig. 5.<br />
Venir tenir comptes valeurs de tensions indiqué dans ce manuel.
8.5.4. connections des contactes de rétro signalisation.<br />
Fig. 6.<br />
Le SwitchPilot peut indiquer à votre centrale digitale sa position exacte <strong>et</strong> ceci grâce à RailCom®. Pour ceci vos aiguillages disposent des contactes de r<strong>et</strong>ro<br />
signalisation conforme. Fig. 6. précise la situation.<br />
A Connection <strong>pour</strong> un contacte de rétro signalisation de fin de course. Veuillez surmonter Out A avec FB A <strong>et</strong> Out B avec FB B.<br />
B Connection <strong>pour</strong> un moteur avec contactes de rétro signalisation séparé. Connecter <strong>les</strong> contactes de rétro signalisation avec <strong>les</strong> bornes FB A <strong>et</strong> FB B. Puis<br />
vous branchez le contacte POL, de interrupteur, à la borne C.<br />
Tous dépends de votre système digital, comment une info de rétro signalisation sera traité.<br />
L’ECoS dispose de c<strong>et</strong>te possibilité à partir du logiciel version 1.1.0, qui est déjà disponible sur www.loksound.be.<br />
8.5.5. Aiguillages à déconnection/polarisation de la partie coeur.<br />
A cause des sortie relais du SwitchPilot Extension vous pouvez branchez des aiguillages in tel<strong>les</strong>.
Fig 7.<br />
8.5.6. Connections servos.<br />
Très particuliers est la connections servo sur votre SwitchPilot. Les sorties fonctionnes indépendantes des sorties 1 à 4. El<strong>les</strong> peuvent être mis en paralle sur<br />
<strong>les</strong> sorties 1 <strong>et</strong> 2. Grâce à ceci vous pouvez piloter le moteurs servo en même temps qu’un consommateur d’un signal qui convient.<br />
Tous <strong>les</strong> servos à trois connections <strong>et</strong> avec impulsion positive peuvent être connecter. Le SwitchPilot prévoit le servo de 5 volt.
Fig. 8.<br />
Placer la fiche du servo sur <strong>les</strong> connections prévue. La connections PULS du servo est normalement le fil blanc ou orange.<br />
Veuillez tenir compte que tous est bien connecter. Une connection incorrecte peut détruire votre servo ainsi que le SwitchPilot.<br />
Les sorties servo peuvent être configuré à part. Voir chapitre 9.4.3.<br />
8. Programmation du SwitchPilot<br />
Vous devez d’abord décider quels numéro d’aiguillage / des signaux doivent réagir sur quel<strong>les</strong> sorties. De c<strong>et</strong>te façon nous pouvez donner au SwitchPilot une<br />
adresse. L’adressage se fait comme dans chapitre 9.3.<br />
Si vous désirez d’influencer certaines sorties, ceci se fait uniquement par la programmation.<br />
Une programmation se fait par une central digitale DCC. Via une central Motorola® comme la 6021 ou la Central Station de Märklin®, ceci n’est pas possible.<br />
Quoique la programmation des CV’s n’est pas possible, l’utilisation en forme Motorola® K83 <strong>et</strong> K84 est bien possible.<br />
9.1. Réglage usine.<br />
Le décodeur est réglé de l’usine, de c<strong>et</strong>te manière que <strong>les</strong> sorties 1 à 4 correspondent de 1 à 4, en mode pulsé avec un pulse de 520 ms.<br />
Les sorties servo ‘s sont programmé de base sur 5, respect. 6, sur 3.75 sec. en mouvement entier.<br />
9.2. Division des adresses des aiguillages.<br />
En pilotant <strong>les</strong> aiguillages seront divisé en 4 groupes. Les aiguillages de 1 - 4 forment le premier groupe, 5 – 8 le 2° groupe, <strong>et</strong>c. Pour Märklin® digital il y à 64<br />
groupes : en total 256 aiguillages. En DCC il y a 511 groupes (en total 2044 aiguillages) supporté. Les adresses désiré sont sauvegardé dans <strong>les</strong> CV 1 <strong>et</strong> 9 du
SwitchPilot. Beaucoup de système digitale emploie aussi des numéraux des aiguillages <strong>et</strong> non <strong>les</strong> adresses, comme l’ECoS. Pour <strong>les</strong> sorties servo’s vous<br />
pouvez choisir d’autres adresses qui seront sauvegarder dan CV 35/36. Ce sont toujours 2 adresses séparés.<br />
9.3. Programmations des adresses via le touche de programmation.<br />
Vous pouvez programmer <strong>les</strong> adresses quand votre SwitchPilot est brancher sur le rail de programmation de votre système digital. Ceci est une méthode<br />
conseillée.<br />
Vous choisissez c<strong>et</strong>te façon de programmation avec le Central Station ou la 6021 de Märklin®.<br />
9.3.1. Les premières adresses <strong>pour</strong> sorties 1 – 4.<br />
1. Faites le choix de l’adresse <strong>pour</strong> la première sorti sur le SwitchPilot. N’oubliez pas de consulter le manuel de votre système digital. Pour <strong>les</strong> utilisateur de l’<br />
ECoS: voir manuel fig. 13ff)<br />
2. Enclencher votre système digital.<br />
3. Activer le bouton poussoir du SwitchPilot jusqu’au moment quel le LED clignote comme: court, pause, court, pause <strong>et</strong>c. (+/- 2 secondes).<br />
4. Lâchez le bouton poussoir. Le décodeur se trouve en mode d’enseignement.<br />
5. Commuter sur votre système digitale l’adresse choisi sou point 1. N’importe si votre aiguillage sous trouve en dévier ou droit.<br />
6. Si le décodeur a reçu l’info de l’adresse, le LED s’allumera <strong>pour</strong> 1 seconde.<br />
7. Le SwitchPilot sort du mode de programmation.<br />
9.3.2. 2 de adresse <strong>pour</strong> sorties 5 – 6<br />
La seconde adresse peut-être employé <strong>pour</strong> <strong>les</strong> sorties servo’s 5 <strong>et</strong> 6. Faites le choix des numéraux successives<br />
1. . Faites le choix de l’adresse <strong>pour</strong> le moteur du servo. N’oubliez pas de consulter le manuel de votre système digital. Pour <strong>les</strong> utilisateur de l’ ECoS: voir<br />
manuel fig. 13ff)<br />
2. Enclencher votre système digital.<br />
3. Activer le bouton poussoir du SwitchPilot jusqu’au moment quel le LED clignote comme:: court, court, pause, court, court, pause, <strong>et</strong>c. (+/- 4 secondes).<br />
4. Lâchez le bouton poussoir. Le décodeur se trouve en mode d’enseignement.<br />
5. Commuter sur votre système digitale l’adresse choisi sou point 1. N’importe si votre aiguillage sous trouve en dévier ou droit.<br />
6. Si le décodeur a reçu l’info de l’adresse, le LED s’allumera <strong>pour</strong> 1 seconde.<br />
7. Le SwitchPilot sort du mode de programmation.<br />
9.4. Programmation via le rail de programmation.<br />
Pour changer <strong>les</strong> caractéristiques du SwitchPilot vous pouvez utiliser la sorti rail de programmation de votre centrale digitale.<br />
Les utilisateurs de l’ECoS peuvent, grâce à la technologie incorporé RailCom®, lire en direct <strong>et</strong> programmer le SwitchPilot.<br />
9.4.1. Connection à un rail de programmation..<br />
Veuillez consulter fig. 9, <strong>pour</strong> la connection à votre système digital..
Fig. 9.<br />
(« Zum Programmiergleis des Digitalsystems » => vers la sortie rail de programmation de votre système digital)<br />
Le SwitchPilot maîtrise tous <strong>les</strong> mode de programmation DCC. Si vous désirez de programmer, vous devez le faire en DCC.<br />
Pour lire une valeur DCC, veuillez brancher une résistance entre C <strong>et</strong> Out A de 180 Ohm / 1 w. Aussi possible est un consommateur qui consomme 60 mA ou<br />
plus. Ceci peut être une ampoule du réseau train.<br />
9.4.2. Caractéristique de programmation de sorties transistor.<br />
Chaque sortie a un numéro de CV:<br />
Configuration selon le mode K83.<br />
Veuillez écrire la valeur 0 dans le CV approprié à la sortie.<br />
sortie n° de CV<br />
1 3<br />
2 4<br />
3 5<br />
4 6
Configuration avec la longueur d’impulse fixe.<br />
Configuration pulsé avec un temps déterminé.<br />
Veuillez écrire la valeur de 2 à 31 dans le CV approprié à la sortie.<br />
C<strong>et</strong>te valeur décrit la durée de l’impulse, comme multiple de 65 ms. Le plus grand c<strong>et</strong>te valeur, de plus grand la durée de l’impulse.<br />
Exemple : Vous désirez une impulse de 1 seconde. Valeur 15 sera sauvegardé dans le CV approprié. A savoir : 16 x 65 ms = 975 ms.<br />
Configurations des sorties <strong>pour</strong> aiguillages PECO.<br />
Si vous attacher un aiguillage PECO à la sortie de votre choix, veuillez sauvegarder la valeur 1 dans ce CV. Ceci en fonction de la sécurité de surcharge.<br />
Configuration du système clignotant.<br />
Si vous désirez que <strong>les</strong> sorties transistor vont alterner (comme <strong>pour</strong> une croix de Saint-André), veuillez sauvegarder unen valeur entre 32 <strong>et</strong> 63 dans le CV<br />
approprié. La valeur est le temps commutation, comme multiple de 130 ms.<br />
Configuration de la sortie continue. (K84).<br />
Sauvegarder valeur 64 dans le CV approprié.<br />
Configuration de l’eff<strong>et</strong> ZOOM.<br />
Pour une commutation particulier réaliste de commutation des signa<strong>les</strong>, il est possible de donner un eff<strong>et</strong> zoom à la sortie. Responsable <strong>pour</strong> ceci est le CV<br />
34. voir tableau dans chapitre 12.<br />
9.4.3. Programmation des CV des sorties servo.<br />
Vitesse servo.<br />
Pour chaque sortie servo, vous pouvez déterminer <strong>et</strong> sauvegarder la durée. Puis le mouvement de l’aiguillage sera véridique.<br />
Vous avez <strong>les</strong> CV 37 <strong>et</strong> 40 à votre disposition. Valeurs entre 0 <strong>et</strong> 63 sont possible, comme multiple de 0.25 s. Comme valeur usine de 15, le servo a besoin<br />
de 15 x 0.25 égale 3.75 secondes <strong>pour</strong> se déplacer. N’oublions pas que le SwitchPilotne change pas <strong>les</strong> caractéristiques de moteur servo.<br />
Position servo<br />
La position du servo peut être déterminer <strong>et</strong> sauvegarder dans <strong>les</strong> CV 38 <strong>et</strong>39, respect. 40 <strong>et</strong> 41. La valeur correcte dépend de la marque du moteur servo.<br />
Cela veut dire, que vous devrez expérimenter. Si votre centrale soutient la programmation POM, comme l’ECoS, vous pouvez sauvegarder le réglage en acte<br />
« agir ». Nous consultons de changer le CV approprié de pas à pas, jusqu’à le servo est arrivé à la bonne position.<br />
Res<strong>et</strong> du SwitchPilot.<br />
Vous faites un res<strong>et</strong> en sauvegardant le valeur 8 dans CV8.<br />
9.5. Programmation avec le LokProgrammerBox ou l’ECos.<br />
Ceux qui possède un LokProgrammerBox (<strong>ESU</strong>-53450 – 53451) ou un ECoS peuvent programmer leurs SwitchPilot avec c<strong>et</strong> appareil. Pour l’ECoS, la<br />
version 1.1.0 ou plus haut est indispensable. Pour le LokProgrammerBox la dernière version. Dans <strong>les</strong> 2 cas, vous trouverez le logiciel gratuit sur<br />
www.loksound.de.
12. Infos technique.<br />
CV Nom Description Portée Valeur<br />
1 Adresse 1 du décodeur, LSB 6 bits inférieur (Bit 0- 5) de la première adresse du décodeur, sorties<br />
1 à 4. Employé en même temps avec CV 9 <strong>pour</strong> sauvegarder<br />
l’adresse.<br />
1 - 63 1<br />
3 Configuration sortie 1 Pour sauvegarder <strong>les</strong> caractéristiques de sortie 1 du décodeur.<br />
0 - 64 8<br />
fonction description valeur<br />
Sortie continu K-83 compatible: la sortie est active le<br />
temps qu’on pousse le bouton<br />
0<br />
Pilotage pulsé Pilotage pulsé <strong>pour</strong> PECO. Adaptation du 1<br />
<strong>pour</strong> PECO décodeur <strong>pour</strong> consommation élevé.<br />
Sortie pulse Durée: multiple de 65 ms. 1-31<br />
Clignotant Alternative Out A <strong>et</strong> Out B sont active.<br />
Durée: multiple de 130 ms.<br />
32-63<br />
Bistable K-84 compatible: Alternative Out A en Out<br />
B sont active. Sortie continu<br />
64<br />
4 Configuration sortie 2 Pour sauvegarder <strong>les</strong> caractéristiques de sortie 2 du décodeur.<br />
Pour fonctions, valeur <strong>et</strong> description voir CV 3.<br />
0 - 64 8<br />
5 Configuration sortie 3 Pour sauvegarder <strong>les</strong> caractéristiques de sortie 3 du décodeur.<br />
Pour fonctions, valeur <strong>et</strong> description voir CV 3.<br />
0 - 64 8<br />
6 Configuration sortie 4 Pour sauvegarder <strong>les</strong> caractéristiques de sortie 4 du décodeur.<br />
Pour fonctions, valeur <strong>et</strong> description voir CV 3.<br />
0 - 64 8<br />
7 Numéro version Version interne logiciel du décodeur. - -<br />
8 Identification fabricant N° du fabricant (ID) <strong>ESU</strong><br />
Si vous sauvegarder valeur 8 dans ce CV vous faites un res<strong>et</strong>.<br />
- 151<br />
9 Adresse 1 du décodeur 1, MSB 3 bits <strong>les</strong> plus haut (Bit 6- 8) de la première adresse du décodeur,<br />
sorties 1 à 4. Employé en même temps avec CV 9 <strong>pour</strong> sauvegarder<br />
l’adresse.<br />
0<br />
28 RailCom configuration Activation <strong>et</strong> configuration de la fonction RailCom<br />
0-3 0<br />
bit description valeur<br />
1 Transmission de données sur canal 2<br />
Pas de transmission de données<br />
Transmission de données permis<br />
2 Transmission de données sur canal<br />
Pas de transmission de données<br />
Transmission de données permis<br />
0<br />
2<br />
0<br />
4
29 Configuration du registre Configuration DCCC du SwitchPilot. 128<br />
bit description valeur<br />
3 Communication RailCom<br />
Communication RailCom débrancher<br />
Communication RailCom permis<br />
7 Le décodeur est un accessoire DCC (article<br />
magnétique) (seul lire, ne peut pas être changé)<br />
33 Statut de la fonction sortie Situation actuel des sorties fonction de 1 à 4. 0 - 255 -<br />
C<strong>et</strong>te situation des 8 rétro signalisation n’est que valable si <strong>les</strong> rétro<br />
signalisation sont branché correcte. La valeur du CV 33 peut être lu<br />
<strong>et</strong> indiqué par RailCom.<br />
bit description valeur<br />
0<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
Statut sortie 1, entrée FB A<br />
Statut sortie 1, entrée FB B<br />
Statut sortie 2, entrée FB A<br />
Statut sortie 2, entrée FB B<br />
Statut sortie 3, entrée FB A<br />
Statut sortie 3, entrée FB B<br />
Statut sortie 4, entrée FB A<br />
Statut sortie 4, entrée FB B<br />
34 Configuration eff<strong>et</strong> zoom Fixer quelle sortie 1 – 4 en m<strong>et</strong>tant en marche <strong>et</strong> en débranchant<br />
exécutera le « zoom ».<br />
bit description valeur<br />
0 Fonction “zoom” active sur sortie 1.<br />
1<br />
1 Fonction “zoom” active sur sortie 2.<br />
2<br />
2 Fonction “zoom” active sur sortie 3.<br />
4<br />
3 Fonction “zoom” active sur sortie 7.<br />
8<br />
35 Adresse 1 du décodeur 2, LSB 6 bits inférieur (Bit 0- 5) de la 2° adresse du décodeur, sorties 5 <strong>et</strong> 6.<br />
Employé en même temps avec CV 36 <strong>pour</strong> sauvegarder l’adresse.<br />
36 Adresse 1 du décodeur 2, MSB 3 bits <strong>les</strong> plus haut (Bit 6- 8) de la 2° adresse du décodeur, sorties 5<br />
<strong>et</strong> 6. Employé en même temps avec CV 35 <strong>pour</strong> sauvegarder<br />
l’adresse.<br />
37 Durée sortie 5 (servo 1) Durée (vitesse) du servo 1 du premier réglage.<br />
Durée est un multiple de 0.25 s.<br />
1 = 0.25 s., … 63 = 15,75 s.<br />
38 Position A sortie 5 (servo 1) Position A de la sortie 5. La valeur est la durée de l’impulsion qui est<br />
envoyé vers le moteur servo. Valeur 0 = 1 ms., …, 63 = 2 ms.<br />
0<br />
8<br />
1<br />
2<br />
4<br />
8<br />
16<br />
32<br />
64<br />
128<br />
0 - 31 0<br />
1<br />
0<br />
15<br />
24
39 Position B sortie 5 (servo 1) Position B de la sortie 5. La valeur est la durée de l’impulsion qui est<br />
envoyé vers le moteur servo. Valeur 0 = 1 ms., …, 63 = 2 ms.<br />
40 Durée sortie 6 (servo 2) Durée (vitesse) du servo 2 du premier réglage.<br />
Durée est un multiple de 0.25 s.<br />
1 = 0.25 s., … 63 = 15,75 s. 1 = 0.25 s., … 63 = 15,75 s.<br />
41 Position A sortie 6 (servo 2) Position A de la sortie 6. La valeur est la durée de l’impulsion qui est<br />
envoyé vers le moteur servo. Valeur 0 = 1 ms., …, 63 = 2 ms.<br />
42 Position B sortie 6 (servo 2) Position B de la sortie 6. La valeur est la durée de l’impulsion qui est<br />
envoyé vers le moteur servo. Valeur 0 = 1 ms., …, 63 = 2 ms.<br />
Garantie.<br />
Votre SwitchPilot a été fabriqué avec beaucoup de soin. Pour cela nous offrons une garanti de 24 mois valable dès le premier jours d’achats <strong>pour</strong> le premier<br />
ach<strong>et</strong>eur.<br />
Cher clients,<br />
Nous vous félicitons avec l’achat de ce produit <strong>ESU</strong>. C<strong>et</strong> appareils de haute qualité a été produit avec beaucoup de soin. Ceci vous donne la possibilité de<br />
jouir de votre hobby. Avant de quitter l’usine votre appareil a été tester <strong>et</strong> contrôler.<br />
<strong>ESU</strong> (electronic solutions ulm GmbH & Co KG, de Ulm Allemagne, après cela : <strong>ESU</strong>) vous offre une garanti de 24 mois sur c<strong>et</strong> appareils, à moins que <strong>les</strong> lois<br />
nationaux impose un autre délai. Dans ce cas là, <strong>les</strong> lois nationaux seront appliquer.<br />
La garantie est valable <strong>pour</strong> tous <strong>les</strong> <strong>produits</strong> <strong>ESU</strong>. La garantie est valable si vous l’avez ach<strong>et</strong>er chez un de nos détaillants agrées <strong>ESU</strong>. Vos devez vousmême<br />
nous prouvé la garantie en m<strong>et</strong>tant sous <strong>les</strong> yeux une preuve d’achats. Celle-ci doit être prévue du cach<strong>et</strong> du détaillant <strong>et</strong> la date d’achat.<br />
Si vous devez envoyer votre appareil vers l’usine, votre appareils sera TOUJOURS accompagné d’une photocopie de la preuve d’achat.<br />
Conditions de garantie.<br />
La garantie embrasse la réparation gratuite ou le remplacement des pièces défectueux par <strong>ESU</strong>, en cas de fautes de production prouvées, fautes de<br />
réparation ou matériaux.<br />
La garantie échoie en cas de:<br />
Usure prouvée.<br />
L’adaptation des pièces, particulièrement la fabrication des câb<strong>les</strong> (de rallonges).<br />
Si votre appareil a été ouvert par un technicien non agrée. L’appareil sera ouvert, que part le service de réparation de <strong>ESU</strong>.<br />
Si vous employez l’appareil en combinaison avec des appareils <strong>et</strong> accessoires non accepté<br />
Si votre appareil a été employer <strong>pour</strong> des choses autres que prescrit dans le manuel.<br />
Si vous n’avez pas suivi le mode d’emploie.<br />
40<br />
15<br />
24<br />
40
<strong>ESU</strong> n’est pas responsab<strong>les</strong> <strong>pour</strong> des pièces réseau qui ne fonctionne pas comme il faut <strong>et</strong> de la apportent le dommage à votre appareil. <strong>ESU</strong> ne remplacera<br />
ou réparera pas ces pièces.<br />
Si vous désirez de profiter de la revendication de la garantie, vous devez envoyer l’appareils en direct chez <strong>ESU</strong>. N’oubliez pas la preuve de garantie <strong>et</strong> le<br />
formulaire de renvoie remplie.<br />
Vous (ou votre détaillant agrée) envoie l’appareil en DIRECT vers:<br />
<strong>ESU</strong> electronic solutions ulm GmbH & Co KG<br />
Garantieabteilung<br />
Industriestrasse 5<br />
D-89081 ULM<br />
Deutschland.<br />
Veuillez remplir <strong>les</strong> formulaires en majuscu<strong>les</strong>!<br />
Support.<br />
<strong>ESU</strong> <strong>et</strong> votre importateur dispose d’un helpdesk.<br />
Veuillez consulter www.esu.eu (<strong>pour</strong> le helpdesk de <strong>ESU</strong> / en Allemand <strong>et</strong> Anglais – aussi valable <strong>pour</strong> le service par e-mail). N’envoyez pas d’e-mail en<br />
Français, ceci restera sans réponse !<br />
Pour cela votre importateur Train Service Danckaert a son propre service helpdesk en Français. Consultez www.loksound.be <strong>pour</strong> <strong>les</strong> données <strong>et</strong> <strong>les</strong> heures<br />
de consultation du helpdesk, spécialement hors des heures du bureau.<br />
Pour la Suisse, veuillez contacter votre importateur Arwico (www.arwico.ch)<br />
Le site Intern<strong>et</strong> www.esu.eu vous offre <strong>les</strong> updates concernant votre ECoS <strong>et</strong> LokProgrammerBox. Veuillez consulter régulièrement ce site Intern<strong>et</strong> ! Si vous<br />
n’avez pas de connection Intern<strong>et</strong>, votre détaillant, qui est à votre disposition <strong>pour</strong> effectuer cela <strong>pour</strong> vous. Sur ce site Intern<strong>et</strong> vous trouvez <strong>les</strong> manuels en<br />
Allemands <strong>et</strong> en Anglais.<br />
Sur le site Intern<strong>et</strong> www.loksound.be nous vous présentons <strong>les</strong> manuels en Néerlandais <strong>et</strong> Français.<br />
Un version plus récente vous sera présenté, si nécessaire, sur ce site Intern<strong>et</strong>.<br />
© Train Service Danckaert, Brugge Belgium<br />
© <strong>Manuel</strong> original : <strong>ESU</strong>, Ulm, Deutchland
Supplément du manuel du SwitchPilot Servo (51802) <strong>et</strong> Servo (51803).<br />
Le SwitchPilot Servo est un chef-d’œuvre sous <strong>les</strong> décodeurs ! Il a été développé spécialement <strong>pour</strong> piloter 4 moteurs servo. Il est équipé d’un système<br />
spécial “Power-on-Pulse-Suppression“ <strong>pour</strong> éviter que <strong>les</strong> moteurs vont sursauter en m<strong>et</strong>tant le courant.<br />
5.2.3 sorties Servo.<br />
Les moteurs RC-servo peuvent être connecter sur <strong>les</strong> décodeur SwitchPilot (<strong>51800</strong>) <strong>et</strong> SwitchPilot Servo (51802). Par rapport aux moteurs standard, le servo<br />
est un moteur intelligent : Nous pouvons définir le mouvement, aussi l’angle <strong>et</strong> la vitesse.<br />
La position nominale sera réglé par le fil des impulsions : normalement BLANC, orange chez Graupner®. Une tension constante de 4 .8 – 6 v. complète<br />
l’interface.<br />
Le servo désire une pulse positive de 1.0 à 2.0 ms. avec un intervalle de 20-25 ms.<br />
<strong>ESU</strong> présente dans sa gamme un moteur servo très compact, complétée avec un tas d’accessoires :<br />
ref.: 51803.<br />
!! Ne changer jamais la position d’un servo par la main!<br />
6.8. Connexion d’un Servo.<br />
Presque tous <strong>les</strong> servo’s trouvable dans le commerce sont uti<strong>les</strong>. Ils doivent être équipé d’une fiche à 3 broches <strong>et</strong> prévue <strong>pour</strong> le pulse positive. Le<br />
SwitchPilot (Servo) a des sorties de 5 v.<br />
Fig. 7 vous montre comment branchez <strong>les</strong> moteurs.
Veuillez enficher la fiche sur <strong>les</strong> connections du SwitchPilot (Servo). Normalement le fil blanc est le fil de l’impulse (sauf : orange chez Graupner®). Si vous<br />
inversez <strong>les</strong> fils, vous pouvez détruire le moteur <strong>et</strong> le SwitchPilot. Les sorties servo doivent être configuré. Voir chapitre 10 svp.<br />
7.2.2.1 Connexion sur le rail de programmation.<br />
Pour programmer le SwitchPilot Servo il faudra le connecter sur le rail de programmation comme indiquer dans fig. 11. Le tension doit venir de la centrale<br />
digitale. Cheque SwitchPilot Servo « comprend » tous <strong>les</strong> modes de programmation DCC pertinente. Nous vous conseillons de programmer le SwitchPilot en<br />
mode Direct DCC. Une résistance de charge de 180 ohm a été prévue à l’intérieur du module. L’extrait des valeurs a été testé via <strong>les</strong> centra<strong>les</strong> digita<strong>les</strong><br />
suivantes : <strong>ESU</strong> ECoS, Bachmann® Dynamis ProBox®, Uhlenbrock® Intellibox® and Lenz® Digital Plus V3®. Malheureusement la centrale Digitrax® unit ne<br />
possède pas de puissance suffisant. ZIMO® units vous rapporterons que la consommation est trop haut. Veuillez utiliser la programmation du rail de réseau<br />
(7.2.1).<br />
8.3 Réglages d’usine.<br />
Les 4 sorties servo’s (de 1 à 4) ont été régler respectivement de 1 à 4 en ont besoin de 3.75 sec. Pour faire un mouvement de 50 % de la distance. Adresse<br />
standard : 1.<br />
10.3. Configuration de la vitesse du servo.<br />
Pour chaque des 4 sorties vous pouvez influencer la durée de A à B.<br />
Les CV’s 37, 40, 43 <strong>et</strong> 46 sont responsable <strong>pour</strong> cela. Valeurs possible entre 0 en 63 comme multiple de 0.25 sec. Exemple : le moteur a besoin de 15 x 0.25<br />
= 3.75 sec. Pour se déplacer de A à B si le réglage d’usine est à 15. Valeurs plus haut mène éventuellement à des mouvement ralentis <strong>et</strong> font bégayer <strong>et</strong> tirer<br />
le moteur. Veuillez réduire la valeur..<br />
10.4. Configuration des sorties servo via l’unité du SwitchPilot Servo.<br />
Pour la configuration des sorties sans pilotage digitale, vous pouvez utiliser <strong>les</strong> 3 interrupteurs <strong>et</strong> 5 LEDs. Voir fig. 13 svp.
a) boutton de programmatin<br />
b) LED de programmation<br />
c) touche „+“<br />
d) touche „-“ drukto<strong>et</strong>s<br />
e) LED servo 1 à 4.<br />
Tous changements sont effectuer en direct. Pour tester la configuration tous <strong>les</strong> moteurs doivent être connecter convenablement. La configuration se fait dans<br />
un mode pre-s<strong>et</strong> :<br />
Départ _<br />
Servo 1: Position „A“ _ Position „B“ _ vitesse de rotation _<br />
Servo 2: Position „A“ _ Position „B“ _ vitesse de rotation _<br />
Servo 3: Position „A“ _ Position „B“ _ vitesse de rotation _<br />
Servo 4: Position „A“ _ Position „B“ _ vitesse de rotation _<br />
_ Einde<br />
La séquence de programmation est activé ainsi:<br />
1. Poussez sur le bouton de programmation <strong>et</strong> tenez le bouton jusqu’à le LED clignote ainsi: court, court, pause, cout, court, pause,.. <strong>et</strong>c.<br />
2. Laissez ce bouton, le décodeur est en mode: apprendre. Le LED du servo 1 s’allume constant. Servo 1 se déplace jusqu’à sa position de démarrage.<br />
3. Via <strong>les</strong> touches + <strong>et</strong> – vous pouvez lui apprendre sa position A. Servo1 prendra la position apprise.<br />
4. Confirmer en appuyant sur la touche a (touche de programmation).<br />
5. Servo 1 bougera vers la position B.<br />
6. Via <strong>les</strong> touches + <strong>et</strong> – vous pouvez lui apprendre sa position B. Servo1 prendra la position apprise.<br />
7. Confirmer en appuyant sur la touche a (touche de programmation).<br />
8. Servo 1 bougera constamment de positions A à B.<br />
9. Via <strong>les</strong> touches + <strong>et</strong> – vous pouvez lui apprendre sa vitesse.<br />
10. Confirmer en appuyant sur la touche a (touche de programmation<br />
11. Le LED de servo 1 s’éteint <strong>et</strong> LED de servo 2 s’allumera. Ceci veut dire que la programmation de servo 2 peut être effectuer. Veuillez suivre <strong>les</strong><br />
étapes de 3 à 10 <strong>et</strong> ceci jusqu’à tous <strong>les</strong> servo’s sont programmés.
!! En confirmant (en appuyant sur la touche a), vous ne changer pas <strong>les</strong> valeur que vous n’avez pas changer avec <strong>les</strong> touches + <strong>et</strong>-.<br />
12. Système <strong>pour</strong> employer <strong>les</strong> moteurs servo sans système digitale.<br />
Le SwitchPilot Servo vous perm<strong>et</strong>s d’employer <strong>les</strong> 4 servo’s dans centrale digitale. Ceci est idéal <strong>pour</strong> ceux qui ont un réseau en analogique.. Il vous<br />
faut 8 interrupteurs (“normale ouvert”) (= 4 servo’s <strong>et</strong> chaque 2 positions). Voir fig. 17 <strong>pour</strong> le schéma svp.<br />
13.1. Temps de commutation.<br />
Responsable <strong>pour</strong> ceci est le CV 49. Il faut insérez le bit convenable <strong>pour</strong> chaque “sortie” qui doit être commuter. Voir tous le détails dans le tableau dans<br />
section 17.