Université Bordeaux I - Master GSAT – IMA - Travaux Dirigés - IMS
Université Bordeaux I - Master GSAT – IMA - Travaux Dirigés - IMS
Université Bordeaux I - Master GSAT – IMA - Travaux Dirigés - IMS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
CADV<br />
Automatique<br />
et Commande de vol<br />
<strong>Travaux</strong> dirigés<br />
IAT 744 F. Cazaurang<br />
http://www.maintenance<strong>–</strong>aeronautique.fr
Linéarisé tangent d’un système non linéaire multivariable<br />
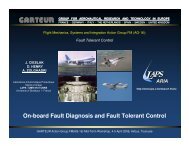
Le procédé représenté sur la figure (1) est un système hydraulique DTS 200 fabriqué par la société amira GmbH . Il<br />
se compose de trois cuves T1, T2 et T3, d'une bâche B0 et de deux pompes P1 et P2. Chaque cuve est reliée à la bâche par<br />
un conduit de section Sn dont le débit est modulable par une vanne manuelle. De plus deux conduits de mêmes sections,<br />
dont le débit est modulable par une vanne, permettent de relier les cuves T1 et T3 d'une part et les cuves T2 et T3 d'autre<br />
part.<br />
Débit Q1 Débit Q2<br />
P1<br />
Cuve T1 Cuve T3 Cuve T2<br />
h1<br />
Vanne 10 Vanne 30 Vanne 20<br />
<strong>Université</strong> <strong>Bordeaux</strong> I - <strong>Master</strong> <strong>GSAT</strong> <strong>–</strong> <strong>IMA</strong> - <strong>Travaux</strong> <strong>Dirigés</strong> - Espace d’état - page n°1/2<br />
h3<br />
Vanne 13 Vanne 32<br />
Bâche B0<br />
figure 1<br />
Les pompes ont un fonctionnement unidirectionnel et sont contrôlées en débit. Les niveaux d'eau dans les cuves, notés<br />
h1, h2 et h3, sont mesurés par des capteurs de pression placés au fond de cuves. Le niveau d'eau de chaque cuve est<br />
proportionnel à l'intégrale des débits des différents conduits. On peut donc écrire les équations suivantes:<br />
S ( ) ( )<br />
( ) ( )<br />
dh<br />
Q h Q h h Q<br />
dt<br />
S dh<br />
Q h Q h h Q<br />
dt<br />
S dh<br />
1<br />
c = − 10 1 − 13 1 , 3 + 1<br />
2<br />
c = − 20 2 + 32 2 , 3 + 2<br />
3<br />
c = −Q h − Q h h + Q h h<br />
dt<br />
( ) ( , ) ( , )<br />
30 3 32 2 3 13 1 3<br />
Sc : section d'une cuve<br />
h2<br />
h1 : hauteur d'eau dans la cuve T1<br />
h2 : hauteur d'eau dans la cuve T2<br />
h3 : hauteur d'eau dans la cuve T3<br />
Q10 : débit de la cuve T1 dans la bâche B0<br />
Q20 : débit de la cuve T2 dans la bâche B0<br />
Q13 : débit de la cuve T1 dans la cuve T3<br />
Q32 : débit de la cuve T3 dans la cuve T2<br />
En utilisant la loi de Toricelli, les différents débits peuvent s'écrire sous la forme suivante:<br />
( )<br />
( )<br />
( )<br />
Q10 h1 = az10S n 2gh1<br />
= a10 h1<br />
Q h = az Sn 2gh<br />
= a h<br />
Q h = az S 2gh<br />
= a h<br />
20 2 20 2 20 2<br />
30 3 30 n 3 30 3<br />
( , ) n ( ) 2<br />
( )<br />
( , ) ( ) 2<br />
( )<br />
Q h h = az S sign h − h g h − h = a sign h − h h − h<br />
13 1 3 13 1 3 1 3 13 1 3 1 3<br />
Q h h = az S sign h − h g h − h = a sign h − h h − h<br />
32 2 3 32 n 3 2 3 2 32 3 2 3 2<br />
Q1 : débit de la pompe P1<br />
Q2 : débit de la pompe P2<br />
(1.1)<br />
Sn représente la section des conduits entre les différents éléments, et les coefficients aij traduisent le débit du conduit<br />
reliant l'élément i à l'élément j via la vanne Vij. Toutes les vannes sont à la même hauteur correspondant au niveau zéro.<br />
P2
Le système de trois équations différentielles non linéaires (I.1) constitue l'équation d'état du procédé. Le vecteur d'état<br />
correspond aux trois hauteurs d'eau h1, h2 et h3. Les entrées de commande sont les deux débits Q1 et Q2, les sorties à<br />
régler sont les niveaux h1 et h2.<br />
−Q10 ( h1 ) − Q13 ( h1 , h3<br />
)<br />
− Q20 ( h2 ) + Q32 ( h2 , h3<br />
)<br />
( ) ( , ) ( , )<br />
h<br />
Q<br />
S H S h<br />
Q( H) B<br />
Q<br />
h Q h Q h h Q h h<br />
Q<br />
⎛ & ⎞ ⎛<br />
⎞ ⎛ ⎞<br />
⎜ ⎟<br />
& &<br />
⎜<br />
⎟ ⎜ ⎟⎛<br />
⎞<br />
c = c ⎜ ⎟ = ⎜<br />
⎟ + ⎜ ⎟⎜<br />
⎟ = +<br />
⎜ & ⎟ ⎜<br />
Q<br />
⎝ ⎠ ⎝−<br />
+ −<br />
⎟ ⎜ ⎟⎝<br />
⎠<br />
⎠ ⎝ ⎠<br />
⎛<br />
1<br />
1 0<br />
1<br />
1 ⎞<br />
2<br />
0 1<br />
⎜ ⎟<br />
2<br />
⎝ 2 ⎠<br />
3 30 3 13 1 3 32 2 3 0 0<br />
h1<br />
⎛ y1<br />
⎞ 1 0 0<br />
⎜ ⎟ = h2<br />
CH<br />
⎝ y2<br />
⎠ 0 1 0<br />
h<br />
⎛<br />
⎛ ⎞<br />
⎞⎜<br />
⎟<br />
⎜ ⎟⎜<br />
⎟ = (I.3)<br />
⎝ ⎠⎜<br />
⎟<br />
⎝ ⎠<br />
Ce modèle constitue le modèle complet du procédé pour chaque configuration. A chaque position des vannes,<br />
correspond un ensemble de valeurs des coefficients aij. La configuration utilisée pour extraire un modèle d'état linéarisé<br />
autour d'un point d'équilibre est la suivante:<br />
Les vannes V10 et V30 sont fermées (a10=a30=0), les vannes V13, V32 et V20 sont ouvertes (a13; a32; a20 non nuls).<br />
On suppose qu'il n'y aura pas d'inversion d'écart de niveau entre les cuves et que h1>h3>h2.<br />
A.1 Point d’équilibre:<br />
A.1.1 En partant de l’hypothèse qu’ au point d’équilibre le débit Q20 est égal à Q1e+Q2e d’une part, et que les débits<br />
Q1e, Q13, Q32, sont égaux d’autre part, montrer que dans la configuration proposée les hauteurs d’équilibre h10,<br />
h20 et h30 peuvent se mettre sous la forme suivante:<br />
h<br />
20<br />
⎛ Q + Q<br />
= ⎜<br />
⎝ a<br />
1e 2e<br />
20<br />
2<br />
⎞<br />
Q<br />
⎟ ; h30 = h20<br />
+<br />
⎠<br />
a<br />
⎛<br />
⎜<br />
⎝<br />
A.2 Linéarisé tangent au voisinage d’un point d’équilibre:<br />
<strong>Université</strong> <strong>Bordeaux</strong> I - <strong>Master</strong> <strong>GSAT</strong> <strong>–</strong> <strong>IMA</strong> - <strong>Travaux</strong> <strong>Dirigés</strong> - Espace d’état - page n°2/2<br />
3<br />
1e<br />
32<br />
2<br />
⎞<br />
Q<br />
⎟ ; h10 = h30<br />
+<br />
⎠<br />
a<br />
⎛<br />
⎜<br />
⎝<br />
A.2.1 En considérant le point d'équilibre (Q1,Q2, h10, h20, h30), montrer que le linéarisé tangent peut s'écrire:<br />
avec δh(<br />
t)<br />
( ) ( ) ( )<br />
δ &h t = Aδh t + BδQ t (I.4)<br />
( )<br />
( )<br />
( )<br />
⎛δh1<br />
t ⎞ ⎛1<br />
0⎞<br />
⎜ ⎟ 1 ⎜ ⎟<br />
= ⎜δh2<br />
t ⎟ , B = ⎜0<br />
1⎟<br />
⎜<br />
⎝δh<br />
t<br />
⎟ Sc ⎜ ⎟<br />
⎠ ⎝0<br />
0⎠<br />
⎛ 2<br />
2<br />
⎜ a13<br />
a13<br />
⎜<br />
− 0<br />
+<br />
2S<br />
Q1<br />
2S<br />
Q<br />
⎜<br />
⎛ 2<br />
2<br />
a<br />
a ⎞<br />
2<br />
⎜<br />
32<br />
20<br />
a32<br />
A = ⎜ 0 − ⎜<br />
+<br />
⎟<br />
⎝ S Q S ( Q + Q ) ⎟<br />
+<br />
2 ⎠ S Q<br />
⎜<br />
1 2 1 2 2<br />
⎜ 2<br />
2<br />
a<br />
a<br />
− +<br />
⎜ 13<br />
32<br />
⎜+<br />
+<br />
⎝ 2S Q<br />
2S Q<br />
2S<br />
Q<br />
3<br />
, δQ(<br />
t)<br />
c e c 1e<br />
c e c e e c 1e<br />
2 2 ( a32 a13<br />
)<br />
c 1e<br />
c 1e<br />
c 1e<br />
( )<br />
( )<br />
1e<br />
13<br />
δQ<br />
t<br />
=<br />
δQ<br />
t<br />
⎛ 1 ⎞<br />
⎜ ⎟<br />
⎝ ⎠<br />
2<br />
⎞<br />
⎟<br />
⎠<br />
2<br />
(I.2)<br />
⎞<br />
⎟<br />
⎟<br />
⎟ ⎛−α<br />
13 0 α ⎞<br />
⎟ Δ 13<br />
⎜<br />
⎟<br />
⎟ = ⎜ 0 α 22 α 32 ⎟<br />
⎟ ⎜<br />
⎟<br />
⎝ α 13 α 32 −α 32 − α 13⎠<br />
⎟<br />
⎟<br />
⎠<br />
A.2.2 Déterminer la matrice de commandabilité du linéarisé tangent en fonction des coefficients α13, α22, α22 et α33.<br />
A.2.3 Montrer que si le coefficient α13 est non nul le système est commandable.
Linéarisé tangent d’un système non linéaire monovariable<br />
Le gyroscope est un instrument constitué d'une roue équilibrée statiquement à fort moment d'inertie en rotation rapide<br />
autour de son axe principal. Si son centre d'inertie est confondu avec son centre de gravité et que le gyroscope est fixé à<br />
une monture lui permettant de flotter sans frottement, il conserve une direction fixe dans l'espace. C'est cette propriété<br />
que l’on utilise dans les plates-formes gyroscopiques qui servent au guidage des fusées, des missiles et des avions. Plus<br />
le frottement est léger, plus la dérive est faible. Les gyroscopes les plus précis, ont respectivement des dérives horaires<br />
de l'ordre d'une minute et de quelques secondes d'arc. Une technologie possible pour réduire les frottements dans un<br />
gyroscope consiste à remplacer les suspensions classiques par un champ électrostatique. Avec ce champ électrostatique<br />
qui maintient en l’air la masse inertielle mobile dans sa cavité, les frottements secs ou visqueux sont quasiment nuls.<br />
Ainsi une fois mise en rotation, la masse inertielle continue à tourner presque indéfiniment.<br />
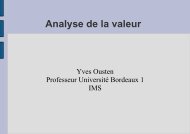
On s’intéresse dans ce sujet à l’asservissement de la position de la masse inertielle dans sa cavité. On considère pour<br />
cette étude un modèle simplifié à une seule dimension de l’espace. Ainsi on suppose que la masse inertielle se déplace<br />
uniquement dans la direction verticale. Sur le schéma électrique figure 1, la masse inertielle est représentée par une<br />
sphère et la partie supérieure de la cavité fixe par une demi-sphère. Le capteur de position permet de mesurer la position<br />
x de la masse inertielle dans la cavité. La position d’équilibre correspond à x = 0. Ce capteur permet également de relier<br />
électriquement la masse inertielle à la masse électrique. L’effort mécanique exercé par le biais du capteur sur la masse<br />
est modélisé par un ressort dont l’effort est proportionnel à l’élongation (Fr = - k x).<br />
Electriquement l’écart entre la cavité et la masse inertielle est équivalent à un condensateur dont la capacité C(x) dépend<br />
de la position x. C(<br />
x)<br />
Aε<br />
0<br />
=<br />
D + x<br />
L’effort électrostatique Fe dépend de la densité du courant q telle que ( t)<br />
x(t)<br />
C(x)<br />
i(t)<br />
Figure 1<br />
<strong>Université</strong> <strong>Bordeaux</strong> I - <strong>Master</strong> G.S.A.T - <strong>IMA</strong> - <strong>Travaux</strong> <strong>Dirigés</strong> - Espace d’état - page n°1/2<br />
R<br />
( t)<br />
dq<br />
i = et s’écrit :<br />
dt<br />
e(t)<br />
F e<br />
2<br />
q<br />
=<br />
2ε A<br />
Le modèle dynamique du système est donné par l’équation mécanique (1) et l’équation électrique (2):<br />
2<br />
( t)<br />
( t)<br />
mg<br />
d x<br />
q<br />
m = −Fr<br />
− Fe + P = −Kx(<br />
t)<br />
− +<br />
2<br />
dt<br />
2Aε ( t)<br />
Ri(<br />
t)<br />
+ v ( t)<br />
( t)<br />
q(<br />
t)<br />
+<br />
C(<br />
x)<br />
2<br />
( t)<br />
0<br />
(1)<br />
dq<br />
dq D + x<br />
= = R<br />
= R + q(<br />
t)<br />
(2)<br />
dt<br />
dt Aε<br />
e c<br />
Le signal d’entrée du système u(t) est la tension d’alimentation e(t).<br />
0<br />
0
Les paramètres du modèle sont la masse de la bille m, l’accélération de la pesanteur g, la résistance du circuit électrique<br />
R, les constantes D, A et ε0 liées à la géométrie et la nature de l’air entre les plaques du condensateur.<br />
A.1 Représentation d’état non linéaire et point d’équilibre<br />
On choisit comme variables d’état :<br />
dx<br />
1 ( t)<br />
x(<br />
t)<br />
, ( )<br />
( t)<br />
x 2 t = , x 3 ( t)<br />
= q(<br />
t)<br />
x =<br />
La sortie y ( t)<br />
du système est la position ( t)<br />
<strong>Université</strong> <strong>Bordeaux</strong> I - <strong>Master</strong> G.S.A.T - <strong>IMA</strong> - <strong>Travaux</strong> <strong>Dirigés</strong> - Espace d’état - page n°2/2<br />
dt<br />
x . L’entrée u(t) du système est la tension e(t).<br />
⎛ x&<br />
1 ⎞ ⎛ f<br />
⎜ ⎟ ⎜<br />
A.1.1 Ecrire une représentation d’état du système non-linéaire sous la forme ⎜ x&<br />
2 ⎟ = f ( x,<br />
u)<br />
= ⎜ f<br />
⎜ ⎟ ⎜<br />
⎝ x&<br />
3 ⎠ ⎝ f<br />
.<br />
1<br />
2<br />
3<br />
( )<br />
( )<br />
( ) ⎟⎟⎟<br />
x,<br />
u ⎞<br />
x,<br />
u<br />
x,<br />
u<br />
A.1.2 En supposant que la bille est en équilibre à la position x = 0 =cste, montrer que le vecteur d’état ( ) 0<br />
e t e = , correspondant à ce point de fonctionnement peuvent se mettre sous la forme suivante :<br />
tension ( ) 0<br />
⎛ 0 ⎞<br />
⎜ ⎟<br />
X 0 = ⎜ 0 ⎟ ; u 0 = D<br />
⎜ ⎟<br />
⎝ 2mgAε<br />
0 ⎠<br />
A.2 Petites variations autour du point d’équilibre ( linéarisation )<br />
2mg<br />
Aε<br />
0<br />
⎠<br />
.<br />
X t X = , et la<br />
On suppose à présent qu’une petite variation δ u(<br />
t)<br />
de la tension induit une petite variation δ x(<br />
t)<br />
de l’état, et y(<br />
t)<br />
sortie.<br />
A.2.1 Montrer que la représentation d’état du système linéarisé autour du point d’équilibre précédent peut s’écrire :<br />
A.3 Analyse du système linéarisé<br />
⎛<br />
⎜<br />
⎜<br />
⎛ & δx<br />
⎞ 1 ⎜<br />
⎜ ⎟ ⎜<br />
⎜ & δx2<br />
⎟ = ⎜<br />
⎜ & ⎟<br />
δx<br />
⎜<br />
⎝ 3 ⎠ ⎜<br />
⎜−<br />
⎜<br />
⎝<br />
0<br />
− K<br />
m<br />
2mg<br />
ε AR<br />
0<br />
2<br />
1<br />
0<br />
0<br />
⎞<br />
0 ⎟<br />
⎟<br />
⎛ ⎞<br />
⎜ 0 ⎟<br />
⎟ ⎛δx1<br />
⎞ ⎜ ⎟<br />
2g<br />
⎟ ⎜ ⎟<br />
− . δx<br />
⎜<br />
2 0 ⎟.<br />
δu<br />
ε 0 Am<br />
⎟ ⎜ ⎟ + ,<br />
⎜ ⎟<br />
⎟ ⎜δx<br />
⎟<br />
⎝ 3 ⎠ ⎜ 1 ⎟<br />
D ⎟ ⎜ ⎟<br />
− ⎟ ⎝ R ⎠<br />
ε 0 AR ⎟<br />
⎠<br />
⎛δx1<br />
⎞<br />
⎜ ⎟<br />
δ y( t)<br />
= ( 1 0 0)<br />
. ⎜δx2<br />
⎟ + 0.<br />
δe(<br />
t)<br />
.<br />
⎜δx<br />
⎟<br />
⎝ 3 ⎠<br />
Expliciter les méthodes pour analyser les propriétés suivantes : (NE PAS FAIRE DE CALCUL)<br />
A.3.1 Stabilité du système au voisinage du point d’équilibre.<br />
A.3.2 Commandabilité du système au voisinage du point d’équilibre (depuis δu).<br />
A.3.3 Observabilité du système linéarisé au voisinage du point d’équilibre ( depuis δy ).<br />
δ de la
Représentation d’état et fonction de transfert<br />
On considère le système dont la fonction de transfert est la suivante :<br />
A.1 Mise sous forme compagne:<br />
F<br />
( s)<br />
=<br />
s<br />
A.1.1 Montrer que la forme compagne associée est la suivante:<br />
( 1+ τ s)<br />
⎛0<br />
1 ⎞ ⎛ 0 ⎞<br />
⎜ 1 ⎟ ⎜ ⎟<br />
A =<br />
0<br />
= =<br />
⎜ −<br />
⎟<br />
B k<br />
⎜<br />
⎟<br />
C D<br />
⎝ τ 1 ⎠ ⎝τ<br />
1 ⎠<br />
<strong>Université</strong> <strong>Bordeaux</strong> I - <strong>Master</strong> <strong>GSAT</strong> - <strong>IMA</strong> - <strong>Travaux</strong> dirigés - Espace d’état - page n°1/1<br />
k<br />
1<br />
( 1 0)<br />
= ( 0)<br />
A.1.2 Donner la représentation par schéma bloc pour la forme compagne précédente.<br />
A.1.3 Ce système est-il à stabilité interne ?<br />
A.2 Détermination de la matrice de transition d’état<br />
A.2.1 Déterminer l’expression de la matrice ( ) ( ) 1 −<br />
Φ s = sI − A .<br />
A.2.2 Montrer que l’expression de la matrice de transition d’état φ(t) est la suivante :<br />
⎡ ⎛ t<br />
− ⎞⎤<br />
⎢ ⎜ τ ⎟ 1<br />
1 τ 1 ⎥<br />
1<br />
( ) 1<br />
1<br />
1 ⎢ ⎜ − e<br />
−<br />
−<br />
−<br />
⎟<br />
At<br />
⎥<br />
φ t = L [ Φ(<br />
s)<br />
] = L [ ( sI − A)<br />
] = e = ⎜ ⎟<br />
⎢ ⎝ ⎠⎥<br />
∀t<br />
≥ 0 .<br />
⎢<br />
t<br />
− ⎥<br />
⎢<br />
τ1<br />
0<br />
⎥<br />
⎣ e ⎦<br />
Le système est initialement au repos avec x(0)=(0,0) t , on applique l’entrée suivante :<br />
u<br />
1<br />
Δ<br />
( t)<br />
= ∀t<br />
≥ 0<br />
A.2.3 Déterminer l’évolution de l’état x(t) dans ces conditions.<br />
A.2.4 Vérifier que la valeur de l’état x0 à l’instant t0 peut alors s’écrire :<br />
⎛ ⎛<br />
⎞<br />
⎜<br />
⎛ t0<br />
⎞⎞<br />
k ⎜<br />
−<br />
⎜ τ ⎟⎟<br />
⎟<br />
1<br />
⎜ ⎜t<br />
0 −τ<br />
1⎜1<br />
− e ⎟⎟<br />
⎜ Δ<br />
⎟<br />
⎜ ⎜ ⎟⎟<br />
⎟<br />
x ( t ) ⎜<br />
⎝ ⎝ ⎠⎠<br />
0 = x0<br />
=<br />
⎟ .<br />
⎜ ⎛ t0<br />
− ⎞<br />
k ⎜ ⎟<br />
⎟<br />
τ1<br />
⎜<br />
⎜1−<br />
e ⎟<br />
⎟<br />
⎜ Δ ⎜ ⎟ ⎟<br />
⎝ ⎝ ⎠ ⎠<br />
A partir de l’instant t = t0 la commande u(t) est mise à zéro. A cet instant l’état du système est égal à x0.<br />
A.2.5 Déterminer l’évolution de l’état x(t) dans ces conditions, pour 0 t t ≥ .<br />
A.2.6 Vers quelle fonction tend x(t) si l’on prend t0=Δ, et que l’on fait tendre t0 vers zéro ?<br />
A.2.7 Comment peut-on obtenir le résultat précédent à partir de φ(t) sans effectuer de calcul.
Représentation d’état et fonction de transfert<br />
A - Représentation d’état associée à une fonction de transfert:<br />
On donne la fonction de transfert suivante: F( s)<br />
A.1 Mise sous forme compagne:<br />
s + 4<br />
=<br />
2<br />
s − s − 2<br />
A.1.1 Montrer que la forme compagne associée est la suivante:<br />
A = B C D<br />
⎛ ⎞<br />
⎜ ⎟ =<br />
⎝ ⎠<br />
⎛<br />
⎜<br />
⎝<br />
⎞<br />
0 1 0<br />
⎟ = =<br />
2 1 1⎠<br />
( 4 1) ( 0 )<br />
A.1.2 Donner la représentation par schéma bloc pour la forme compagne précédente.<br />
A.2 Mise sous forme diagonale<br />
A.2.1 Décomposer la fonction de transfert en éléments simples.<br />
A.2.1 En déduire que ce système peut se mettre sous la représentation d’état diagonale suivante :<br />
Ad = Bd Cd Dd<br />
− ⎛ ⎞<br />
⎜ ⎟ =<br />
⎝ ⎠<br />
⎛<br />
⎜<br />
⎝<br />
⎞<br />
1 0 1<br />
⎟ = − =<br />
0 2 1⎠<br />
( 1 2) ( 0 )<br />
A.2.2 Comparer cette représentation avec celle obtenue en diagonalisant la matrice A.<br />
A.2.3 Déterminer l’évolution de l’état pour une entrée u(t) échelon unitaire (u(t)=1 pour t>0) dans la base associée à la<br />
réalisation (Ad,Bd,Cd,Dd)<br />
B - fonction de transfert associée à une représentation d’état:<br />
On donne la réalisation suivante:<br />
Le vecteur d’état s’écrit ( )<br />
⎛ −1<br />
⎞<br />
⎜ 0 0⎟<br />
⎜ τ 1 ⎟<br />
⎛<br />
−<br />
⎜<br />
1 0 ⎞<br />
A =<br />
⎜ 1 ⎟ −1<br />
⎟<br />
σ 0 B = ⎜0<br />
⎟ C = D =<br />
⎜ τ ⎟<br />
2 ⎜ τ 2 ⎟<br />
⎜ ⎟ ⎜ ⎟<br />
⎜<br />
0 1 0<br />
⎟<br />
⎝0<br />
0 ⎠<br />
⎝ ⎠<br />
⎛θ⎞<br />
⎜ ⎟<br />
x t = ⎜ v⎟<br />
⎜ ⎟<br />
⎝h⎠<br />
et le vecteur des entrées u( t)<br />
B.1 Donner une représentation graphique de l’équation d’état.<br />
B.2 Déterminer la fonction de transfert entre h(t) et u(t).<br />
f<br />
=<br />
w<br />
⎛ ⎞<br />
⎜ ⎟<br />
⎝ ⎠<br />
B.3 Déterminer la fonction de transfert entre h(t) et w(t). Commenter.<br />
( 0 0 1) ( 0)<br />
<strong>Université</strong> <strong>Bordeaux</strong> I - <strong>Master</strong> <strong>GSAT</strong> - <strong>IMA</strong> - <strong>Travaux</strong> dirigés - Espace d’état - page n°1/1
Représentation d’état et fonction de transfert<br />
On considère le système dont la fonction de transfert est la suivante:<br />
A.1 Mise sous forme compagne:<br />
F<br />
( s)<br />
=<br />
s<br />
A.1.1 Montrer que la forme compagne associée est la suivante:<br />
s + 3<br />
+ 2s<br />
+ 2<br />
⎛ 0 1 ⎞ ⎛0<br />
⎞<br />
A = ⎜<br />
=<br />
2 2 ⎟ B = ⎜<br />
1 ⎟ C D<br />
⎝−<br />
− ⎠ ⎝ ⎠<br />
<strong>Université</strong> <strong>Bordeaux</strong> I - <strong>Master</strong> G.S.A.T - <strong>IMA</strong> - <strong>Travaux</strong> dirigés - Espace d’état - page n°1/1<br />
2<br />
( 3 1)<br />
= ( 0)<br />
A.1.2 Donner la représentation par schéma bloc pour la forme compagne précédente.<br />
A.2 Mise sous forme diagonale<br />
A.2.1 Montrer que la matrice A possède deux valeurs propres complexes distinctes λ1 et λ2.<br />
Les coordonnées dans la base de diagonalisation Bd seront notées X*. Les coordonnées dans la base associée à la forme<br />
compagne Bc seront notées X.<br />
A.2.2 Montrer qu’une matrice de passage vérifiant X*=PX possible est la matrice : ⎟ ⎛ 1 1 ⎞<br />
P = ⎜<br />
⎝−1<br />
− i −1+<br />
i⎠<br />
A.2.3 En déduire que dans ce nouveau système de coordonnées, une réalisation du système est donnée par :<br />
A<br />
d<br />
⎛−1<br />
− i 0 ⎞ 1 ⎛−1⎞<br />
= ⎜<br />
= ⋅ =<br />
0 1 ⎟ Bd<br />
2 ⎜<br />
1 ⎟ Cd<br />
d<br />
⎝ − + i⎠<br />
i ⎝ ⎠<br />
( 2 − i 2 + i)<br />
D = ( 0)<br />
A.2.4 Donner la représentation par schéma bloc pour la forme diagonale précédente.<br />
A.3 Détermination de la matrice de transition d’état à partir de la forme compagne<br />
A.3.1 Déterminer l’expression de la matrice ( ) ( ) 1 −<br />
{ }<br />
-at<br />
On rappelle que L K e sin ωt<br />
⋅u(<br />
t)<br />
Kω<br />
=<br />
s + a ω<br />
Φ s = sI − A .<br />
K<br />
{ } ( s + a)<br />
=<br />
-at<br />
et L K e cosωt<br />
⋅u(<br />
t)<br />
2<br />
2<br />
( ) +<br />
2<br />
2<br />
( ) +<br />
s + a<br />
A.3.2 Déterminer l’expression de la matrice de transition d’état Φ(t) à partir de la matrice Φ(s).<br />
A.4 Détermination de la matrice de transition d’état à partir de la forme diagonale<br />
Ad<br />
t<br />
A.4.1 Déterminer l’expression de la matrice Φ ( t ) = e .<br />
d<br />
A.4.2 A l’instant t = 0s, l’état du système est égal à x0. La commande u(t) est nulle pour t ≥ 0s<br />
. Déterminer l’évolution<br />
de X*(t) (coordonnées de l’état dans la base Bd) dans ces conditions, pour 0 t t ≥ .<br />
A.4.3 Donner l’expression de l’évolution de X(t) (coordonnées de l’état dans la base Bc) en fonction de la matrice Φd(t)<br />
et de la matrice de passage P. Ne pas faire le calcul. Quel est le lien avec la matrice Φ(t) calculer en A.3.2.<br />
ω<br />
.
On considère le système suivant:<br />
B.1 Mise sous forme compagne:<br />
Représentation d’état et fonction de transfert<br />
F<br />
( s)<br />
3<br />
s<br />
s − s −1<br />
=<br />
= 1−<br />
3 2<br />
3 2<br />
s + s − s −1<br />
s + s − s −1<br />
B.1.1 Montrer que la forme compagne associée est la suivante:<br />
⎛0<br />
1 0 ⎞ ⎛0<br />
⎞<br />
⎜ ⎟ ⎜ ⎟<br />
A = ⎜0<br />
0 1 ⎟ B = ⎜0<br />
⎟ C =<br />
D<br />
⎜<br />
1 1 1<br />
⎟ ⎜<br />
1<br />
⎟<br />
⎝ − ⎠ ⎝ ⎠<br />
<strong>Université</strong> <strong>Bordeaux</strong> I - <strong>Master</strong> <strong>GSAT</strong> - <strong>IMA</strong> - <strong>Travaux</strong> dirigés - Espace d’état - page n°1/1<br />
2<br />
( 1 1 −1)<br />
= ( 1)<br />
B.1.2 Donner la représentation par schéma bloc pour la forme compagne précédente.<br />
B.1.3 Montrer que λ = −1<br />
et λ 1 sont des valeurs propres de A. En déduire les multiplicités associées.<br />
B.2 Mise sous forme modale<br />
1<br />
2 =<br />
B.2.1 Montrer que la matrice A n’est pas diagonalisable.<br />
Les coordonnées dans la base de Jordanisation seront notées X*. Une matrice de passage vérifiant X=PX* possible est<br />
⎛ 1 0 1⎞<br />
⎜ ⎟<br />
la matrice : P = ⎜−1<br />
1 1⎟<br />
.<br />
⎜ ⎟<br />
⎝ 1 − 2 1⎠<br />
B.2.2 En déduire que dans ce nouveau système de coordonnées, une réalisation du système est donnée par :<br />
A<br />
J<br />
⎛−1<br />
1 0⎞<br />
⎛ −1⎞<br />
⎜ ⎟ 1 ⎜ ⎟<br />
= ⎜ 0 −1<br />
0⎟<br />
BJ<br />
= ⎜−<br />
2⎟<br />
C J =<br />
J<br />
⎜<br />
4<br />
0 0 1<br />
⎟ ⎜<br />
1<br />
⎟<br />
⎝ ⎠ ⎝ ⎠<br />
( −1<br />
3 1)<br />
D = ( 1)<br />
B.2.3 Donner la représentation par schéma bloc pour la forme de Jordan précédente.<br />
B.3 Solution de l’équation d’état dans la base modale<br />
B.3.1 Déterminer l’expression de la matrice ( ) ( ) 1 −<br />
Φ = − J A sI s .<br />
B.3.2 Montrer que l’expression de la matrice de transition d’état φ(t) est la suivante :<br />
1⎛ 1<br />
−<br />
On rappelle que L ⎜ ⎟ = t ⋅u(<br />
t)<br />
⎝ s<br />
2<br />
⎞<br />
⎠<br />
−1<br />
( t)<br />
= L Φ(<br />
s)<br />
−1<br />
[ ] = L ( sI − AJ<br />
)<br />
0 ⎤<br />
−1<br />
⎢ −t<br />
⎥<br />
[ ] = ⎢ 0 e 0 ⎥ ∀t<br />
≥ 0<br />
φ .<br />
⎢ 0<br />
⎣<br />
0<br />
t<br />
e ⎥<br />
⎦<br />
avec u(t) la fonction échelon.<br />
Le système est initialement éloigné du point d’équilibre avec x(0)=(x10, x20, x30) t , l’entrée de commande est nulle pour t>0.<br />
B.3.3 Déterminer l’évolution de l’état x(t) exprimé dans la base initiale dans ces conditions.<br />
B.3.4 Un tel système est-il stable ?<br />
⎡e<br />
−t<br />
te<br />
−t