
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Système du 1 er ordre<br />
1)Préparation (TD)<br />
ANALYSES FREQUENTIELLES DES SYSTEMES<br />
Travaux dirigés + Travaux pratiques<br />
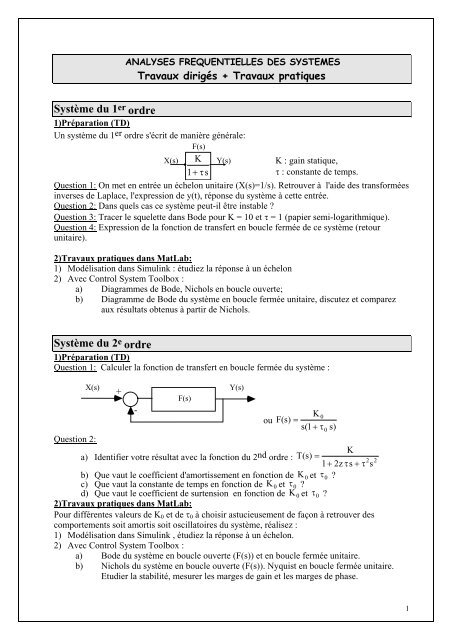
Un système du 1er ordre s'écrit de manière générale:<br />
F(s)<br />
X(s) K Y(s) K : gain statique,<br />
1+<br />
τs<br />
τ : constante de temps.<br />
Question 1: On met en entrée un échelon unitaire (X(s)=1/s). Retrouver à l'aide des transformées<br />
inverses de Laplace, l'expression de y(t), réponse du système à cette entrée.<br />
Question 2: Dans quels cas ce système peut-il être instable ?<br />
Question 3: Tracer le squelette dans Bode pour K = 10 et τ = 1 (papier semi-logarithmique).<br />
Question 4: Expression de la fonction de transfert en boucle fermée de ce système (retour<br />
unitaire).<br />
2)Travaux pratiques dans MatLab:<br />
1) Modélisation dans Simulink : étudiez la réponse à un échelon<br />
2) Avec Control System Toolbox :<br />
a) Diagrammes de Bode, Nichols en boucle ouverte;<br />
b) Diagramme de Bode du système en boucle fermée unitaire, discutez et comparez<br />
aux résultats obtenus à partir de Nichols.<br />
Système du 2 e ordre<br />
1)Préparation (TD)<br />
Question 1: Calculer la fonction de transfert en boucle fermée du système :<br />
X(s)<br />
+<br />
F(s)<br />
Y(s)<br />
-<br />
K 0<br />
ou F(<br />
s)<br />
=<br />
s(<br />
1+<br />
τ0<br />
s)<br />
Question 2:<br />
a) Identifier votre résultat avec la fonction du 2nd K<br />
ordre : T(<br />
s)<br />
=<br />
2 2<br />
1+<br />
2z<br />
τs<br />
+ τ s<br />
b) Que vaut le coefficient d'amortissement en fonction de 0 K et 0 τ ?<br />
c) Que vaut la constante de temps en fonction de 0 K et 0 τ ?<br />
d) Que vaut le coefficient de surtension en fonction de 0 K et 0 τ ?<br />
2)Travaux pratiques dans MatLab:<br />
Pour différentes valeurs de K0 et de τ0 à choisir astucieusement de façon à retrouver des<br />
comportements soit amortis soit oscillatoires du système, réalisez :<br />
1) Modélisation dans Simulink , étudiez la réponse à un échelon.<br />
2) Avec Control System Toolbox :<br />
a) Bode du système en boucle ouverte (F(s)) et en boucle fermée unitaire.<br />
b) Nichols du système en boucle ouverte (F(s)). Nyquist en boucle fermée unitaire.<br />
Etudier la stabilité, mesurer les marges de gain et les marges de phase.<br />
1
Problème 1<br />
Un ensemble amplificateur-moteur a été testé et l'on à déterminé expérimentalement la réponse<br />
en fréquence du système. Cette réponse est donnée dans le diagramme de Bode donnée en<br />
annexe 1. Une formalisation théorique a permis la détermination d'un modèle du type :<br />
K<br />
G(<br />
s)<br />
=<br />
s(<br />
1 + τ1s)(<br />
1 + τ 2s)<br />
1) Préparation (TD):<br />
Retrouver à partir du diagramme de Bode (en annexe1) les valeurs de K, τ 1 et τ 2<br />
2)Travaux pratiques dans MatLab:<br />
1. Tracer le diagramme de Bode à partir des valeurs que vous avez trouvé (vérifiez avec le<br />
modèle).<br />
2. Etude du système en boucle fermée : tracé dans Nichols.<br />
a. Bande passante à -6dB ?<br />
b. Coefficient de surtension et fréquence de résonance ?<br />
3. Gain à introduire en série pour obtenir un coefficient de surtension Q = 2<br />
(20Log(2)=6dB).<br />
( 1+<br />
Ts)<br />
4. Adjonction d'un système correcteur PD C(<br />
s)<br />
= P * avec P=100, T=0.03 et τ=0.001<br />
1+<br />
τs<br />
5. Tracé dans Nichols, mesures des caractéristiques.<br />
Problème 2<br />
L'analyse harmonique expérimentale d'un système que l'on veut asservir a donné le diagramme<br />
de Bode présentée en annexe 2, (courbe de la fonction de transfert en boucle ouverte). Une<br />
formalisation théorique préalable a permis la détermination du modèle suivant :<br />
K(<br />
1+<br />
τ1s)<br />
G(<br />
s)<br />
=<br />
2<br />
s(<br />
1+<br />
τ2s)<br />
1) Préparation (TD):<br />
Retrouver les valeurs de K, τ 1 et τ 2 .<br />
Tracer les squelettes du module et de la phase dans Bode.<br />
Expliquer le rôle de K, τ 1 et τ 2 dans l'allure des courbes.<br />
2)Travaux pratiques dans MatLab:<br />
Idem problème n°1 mais avec le correcteur PID C ( s)<br />
= P + Ds<br />
+ I / s dont vous<br />
déterminerez les paramètres d'après les prescriptions de Ziegler et Nichols (mesurez<br />
les conditions au pompage limite Ku et Tu).<br />
Problème 3<br />
Idem problème n°2 mais avec le diagramme de l'annexe 3 et la fonction de transfert b.o.<br />
K<br />
G(<br />
s)<br />
=<br />
( 1 + τ s)(<br />
1 + τ s)(<br />
1 + τ s)<br />
1<br />
2<br />
3<br />
2
Problème 4<br />
Soit le circuit :<br />
R1<br />
i1<br />
i i'=0<br />
C1<br />
i2 v1 C2<br />
u<br />
v2 R2<br />
v<br />
1) Tracer le schéma fonctionnel du système en utilisant le formalisme de Laplace, sachant que<br />
ce schéma fonctionnel est du type suivant (identifier F1, F2, F3, F4 en fonction de R1, R2, C1,<br />
C2) :<br />
U(s)<br />
+<br />
On posera 1 = R1C1<br />
-<br />
F (s)<br />
1<br />
F 2 (s)<br />
I1(s)<br />
I2(s)<br />
+<br />
+<br />
I(s)<br />
τ , τ 2 = R 2C<br />
2 , et 12 = R1C<br />
2<br />
τ .<br />
F 3(s)<br />
F 4(s)<br />
V1(s)<br />
+<br />
V2(s)<br />
2) En arrangeant le schéma bloc, mettre le schéma fonctionnel sous la forme :<br />
U(s) +<br />
V(s)<br />
F(s)<br />
-<br />
+<br />
V(s)<br />
Montrer que l'on peut mettre la fonction de transfert en boucle fermée sous la<br />
forme :<br />
V(<br />
s)<br />
( 1 + τ1s)(<br />
1 + τ1s)<br />
, ,<br />
H(<br />
s)<br />
= =<br />
(trouver τ<br />
, ,<br />
1 et τ 2 ).<br />
U(<br />
s)<br />
( 1 + τ1s)(<br />
1 + τ2s)<br />
3) On pose τ = . 1s,<br />
τ = 0.<br />
01s,<br />
et τ = 0.<br />
095s<br />
. Tracer les squelettes de H(s) dans Bode.<br />
1<br />
0 2<br />
12<br />
4) Travaux pratiques dans MatLab:<br />
• Simulation temporelle dans Simulink.<br />
• Représentation fréquentielle (Bode, Nichols, Nyquist).<br />
• Nouvelle expression de H(s) quand l'impédance de charge en sortie du circuit est non<br />
infinie.<br />
3
Problème 5<br />
Soit le système mécanique suivant constitué d'un amortisseur (relié à un ressort) sur lequel on<br />
applique une force F:<br />
C P M<br />
F<br />
x y<br />
M est la masse du cylindre C de l'amortisseur, k est la constante de raideur du ressort (masse du<br />
ressort nulle), f est le coefficient de frottement visqueux entre le piston P et le cylindre C , x et y<br />
sont les déplacements respectifs du piston et du cylindre à partir d'une position de repos.<br />
Questions (TD)<br />
• Ecrire les équations différentielles du système.<br />
• Passer au formalisme de Laplace et trouver la fonction de transfert du système:<br />
T ( s)<br />
=<br />
Y(<br />
s)<br />
X(<br />
s)<br />
Travaux pratiques dans MatLab:<br />
• Modélisation dans Simulink : réponse temporelle<br />
• Analyse fréquentielle : Bode, Nichols, Nyquist .<br />
Problème 6<br />
Soit le système mécanique suivant constitué de deux amortisseurs en série relié à un ressort.<br />
Les masses des amortisseurs et du ressort sont négligées:<br />
f1 f2<br />
x y z<br />
f1 et f2 sont les coefficients de frottement visqueux, k la constante de raideur du ressort, x y et z<br />
sont les déplacements respectifs du premier piston, et des cylindres 1 et 2.<br />
Questions (TD)<br />
• Ecrire les équations différentielles du système.<br />
• Passer au formalisme de Laplace et trouver la Transmittance:<br />
T(<br />
s)<br />
=<br />
Y(<br />
s)<br />
X(<br />
s)<br />
(on posera a<br />
=<br />
f<br />
f<br />
+ f<br />
Travaux pratiques dans MatLab: Idem pb n°6<br />
1<br />
1<br />
2<br />
f 2<br />
et b =<br />
k<br />
k<br />
k<br />
)<br />
4