Etude et conception d'un plateau orientable pour piloter les ... - EIA-FR
Etude et conception d'un plateau orientable pour piloter les ... - EIA-FR
Etude et conception d'un plateau orientable pour piloter les ... - EIA-FR

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
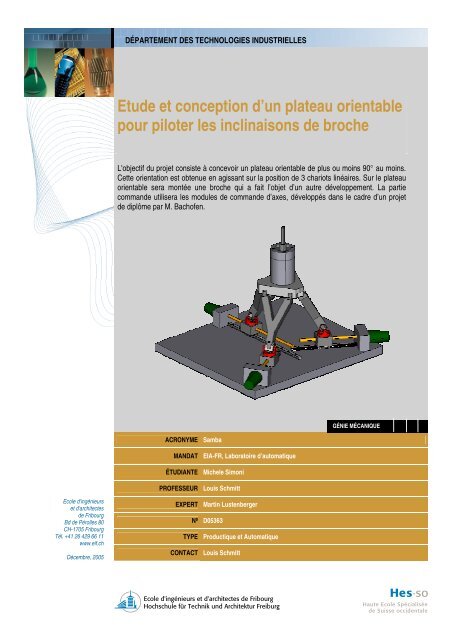
DÉPARTEMENT DES TECHNOLOGIES INDUSTRIELLESGÉNIE MÉCANIQUEIntroductionUne étude de faisabilité a étéeffectuée sur la base d’un conceptexistant, cependant, ce dernier nepeut pas orienter la tête d’un anglede 90°.Un nouveau concept a doncété réalisé sur la base de ceconcept existant.Concept du systèmeLe concept comprend une motobroche fixé sur un <strong>plateau</strong>, troisguidages linéaires placés à 120°l’un par rapport à l’autre <strong>et</strong>actionnés chacun par un moteurélectrique. La liaison entre le<strong>plateau</strong> <strong>et</strong> <strong>les</strong> guidages est effectuéau moyen de 3 bras. Afin d’obtenir<strong>les</strong> degrés de liberté souhaités <strong>pour</strong>le déplacement de la tête dansl’espace, <strong>les</strong> liaisons entre bras <strong>et</strong>guidages sont effectuées au moyende rotu<strong>les</strong>, <strong>et</strong> <strong>les</strong> liaisons entre bras<strong>et</strong> <strong>plateau</strong> au moyen de jointcylindriques.En fixant une broche sur ce type desystème, on arrive à exécuter desusinages selon differents ang<strong>les</strong>dans l’espace.<strong>Etude</strong> du mouvementUne étude des mouvements dusystème a ensuite été effectuée aumoyen des logiciels ADAM <strong>et</strong>DynaFlexPro (sur la base de lathéorie de la modélisationmathématique des systèmesdynamiques étudié par MathieuLéger).Les calculs ont été réalisés <strong>pour</strong> unpositionnement de la tête à 90° (voirfigure ci-dessous) <strong>et</strong> <strong>pour</strong> une vitesseconstante des chariots :Comme on peut le voir sur legraphique ci-dessous, lecomportement dynamique calculé parADAMS <strong>et</strong> exactement le même quecelui calculé par la théorie de lamodélisation des systèmesdynamiques.10 0806040200Angl e de l 'outi l0 2 4 6 8 10 12 14 16 18 20 22 24TempsResult at s des é quat ion sResult at s de AdamsOn peu donc en déduire que <strong>les</strong>équations cinématiques qu’on atrouvé perm<strong>et</strong>tent de décrire ladynamique du système.Analyse du systèmeLe dimensionnement du système aété réalisé par rapport au cas le pluscritique, c'est-à-dire la position du<strong>plateau</strong> à 90°. L’analyse FEM a faitressortir un déplacement maximal dusystème de 0.2mm.ConclusionD’âpres <strong>les</strong> résultats obtenu on peutdire que ce système peut effectuerdes usinages avec le <strong>plateau</strong> orientéjusqu’à 90°, mais l’utilisation seraitplus optimale avec le <strong>plateau</strong> inclinéà 50°, car, au delà de c<strong>et</strong> angle, <strong>les</strong>forces sur <strong>les</strong> chariots augmententconsidérablement, comme on peut levoir ci dessus.Force (N)100500-50-100-150-200-250-300-350-400Force necesaire au verin0 2 4 6 8 10 12 14 16 18 20 22 24Temps