évaluation du coût et des résultats des méthodes permettant d ...
évaluation du coût et des résultats des méthodes permettant d ...
évaluation du coût et des résultats des méthodes permettant d ...
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
FORMATION DES INGÉNIEURS FORESTIERSÉVALUATION DU COÛT ET DESRÉSULTATS DES MÉTHODES PERMETTANTD’ÉVALUER L’EFFICACITÉ DE LA FORÊTFACE À L’ALÉA CHUTE DE BLOCForêt communale de Grignon (73)Benjamin Poilv<strong>et</strong>, Blandine Masson, Louis Jamin, Marine LoveroFormation <strong>des</strong> Ingénieurs Forestiers, domaine d’approfondissement gestion forestière.Octobre 2010
SommaireRemerciements ....................................................................................................................................... 2Liste <strong>des</strong> sigles employés ......................................................................................................................... 2Intro<strong>du</strong>ction ............................................................................................................................................. 31. Généralités ...................................................................................................................................... 41.1. Présentation <strong>du</strong> site ................................................................................................................ 41.2. Présentation générale <strong>des</strong> métho<strong>des</strong> ..................................................................................... 41.2.1. Présentation de l’indice de maitrise de l’aléa (IMA). ...................................................... 41.2.2. Présentation de l’outil RockFor NET (RFN). ........................................................................ 51.2.3. Présentation <strong>du</strong> modèle RockyFor3D (RF3D) .................................................................. 52. Phase de terrain <strong>et</strong> d’acquisition <strong>des</strong> données ............................................................................... 72.1. Préparation de la phase de terrain <strong>et</strong> données nécessaires ................................................... 72.2. Différents types de plac<strong>et</strong>tes .................................................................................................. 92.2.1. Les plac<strong>et</strong>tes à surface fixe .............................................................................................. 92.2.2. Les plac<strong>et</strong>tes à angle fixe ou plac<strong>et</strong>tes relascopiques ................................................... 102.2.3. Les plac<strong>et</strong>tes PCQM (Point-Centered Quarter M<strong>et</strong>hod) ............................................... 102.3. Création <strong>des</strong> rasters <strong>et</strong> délimitation de zones d’étude ......................................................... 122.4. LIDAR ..................................................................................................................................... 153. Analyse <strong>des</strong> métho<strong>des</strong> ................................................................................................................... 163.1. Résultats obtenus .................................................................................................................. 163.1.1. IMA ................................................................................................................................ 163.1.2. RockFor NET ...................................................................................................................... 183.1.3. RockyFor3D .................................................................................................................... 193.2. Avantages <strong>et</strong> inconvénients <strong>des</strong> trois métho<strong>des</strong> .................................................................. 233.2.1. IMA ................................................................................................................................ 233.2.2. RockFor NET ...................................................................................................................... 233.2.3. RockyFor3D .................................................................................................................... 243.3. Coût <strong>et</strong> efficacité <strong>des</strong> trois métho<strong>des</strong> ................................................................................... 253.3.1. Analyse <strong>des</strong> coûts <strong>des</strong> différentes métho<strong>des</strong> ................................................................ 253.3.2. Coûts fixes / Coûts variables.......................................................................................... 283.3.3. Comparaison <strong>des</strong> métho<strong>des</strong> .......................................................................................... 294. Efficacité de la forêt contre les chutes de pierre .......................................................................... 314.1. Enjeux concernés ................................................................................................................... 314.2. Coûts de substitution ............................................................................................................ 314.3. Coûts évités ........................................................................................................................... 33Conclusion ............................................................................................................................................. 35Bibliographie.......................................................................................................................................... 37Contacts ................................................................................................................................................. 38Annexes ................................................................................................................................................. 391
RemerciementsNous souhaitons tout d’abord remercier Sylvain Dupire pour son soutien <strong>et</strong> son aide tout au long<strong>du</strong> proj<strong>et</strong>, de la phase de préparation à celle d’analyse, ainsi que Max Brucciamacchie, pour leurencadrement lors de ce proj<strong>et</strong>.Nous souhaitons également dire merci à Nicolas Clou<strong>et</strong> <strong>et</strong> Frédéric Berger au CEMAGREF pourleurs réponses à nos nombreuses interrogations, ainsi qu’au CEMAGREF pour son accueil.Liste <strong>des</strong> sigles employésARP : Aléa Rési<strong>du</strong>el ProbableASCII : raster sous les logiciels de la suite ESRICEMAGREF : Centre d’Etude <strong>du</strong> Machinisme Agricole, <strong>du</strong> Génie Rural <strong>des</strong> Eaux <strong>et</strong> <strong>des</strong> ForêtsGPS : Global Positionning SystemGSM : Guide de Sylvicole de MontagneIGN : Institut Géographique NationalIMA : Indice de Maîtrise de l’AléaLIDAR : Light D<strong>et</strong>ection And RangingMNH : Modèle Numérique de Hauteur de canopéeMNS : Modèle Numérique de SurfaceMNT : Modèle Numérique de TerrainMOH : Mean obstacle HightONF : Office National <strong>des</strong> ForêtsPAQ : Plan d’Assurance QualitéPCQM : Pont Centered Quarter M<strong>et</strong>hodPPSPS : Plan Particulier de Sécurité <strong>et</strong> de Protection de la SantéRF3D : RockyFor3DRFN : RockFor NETSOGED : Schéma d’Organisation <strong>et</strong> de GEstion <strong>des</strong> déch<strong>et</strong>sTIN : Triangulated Irregular N<strong>et</strong>work2
Intro<strong>du</strong>ction« Forêt de protection contre les chutes de blocs ». Si l’expression peut choquer le néophytenon montagnard, ce rôle de protection joué par la forêt est pourtant une réalité bien connue dans lesAlpes. Certaines forêts alpines, à l’instar de nombreuses forêts situées en zone de montagne, de parleur localisation sur <strong>des</strong> versants abrupts situés à l’aval de falaises <strong>et</strong> à l’amont de zones densémentpeuplées, se trouvent en eff<strong>et</strong> sur <strong>des</strong> zones de transit de blocs. Ces blocs constituent un aléa, c'està-direun évènement naturel pouvant porter préjudice à l’homme ou à ses activités, ces derniersétant alors définis comme <strong>des</strong> enjeux. En offrant <strong>des</strong> obstacles aux blocs, les peuplements forestierspeuvent jouer un rôle crucial dans la protection <strong>des</strong> biens <strong>et</strong> <strong>des</strong> personnes diminuant ainsi lesrisques (croisement d’un aléa <strong>et</strong> d’un enjeu) en présence. Ces biens <strong>et</strong> ces personnes seraient, eneff<strong>et</strong>, considérablement plus menacés par c<strong>et</strong> aléa en l’absence de forêt.Dans le but d’étudier ce rôle de protection joué par certaines forêts de montagne <strong>et</strong> del’évaluer, un programme de financement européen, Interreg « Forêts de protection », est né entre laFrance, la Suisse <strong>et</strong> l’Italie. C’est dans le cadre de ce proj<strong>et</strong> que s’inscrit c<strong>et</strong>te étude. Le but de c<strong>et</strong>tedernière est d’effectuer une étude comparative de trois métho<strong>des</strong> d’évaluation <strong>du</strong> rôle deprotection de la forêt : l’indice de maitrise de l’aléa, la méthode Rockfor NET <strong>et</strong> le modèle Rockyfor3D.Leur mise en place s’est effectuée sur un cas d’étude bien précis, une forêt de 6 ha servant dechantier pilote Interreg <strong>et</strong> située sur la commune de Grignon, en Savoie.Nous avons eu pour objectifs de comparer ces trois outils, tant <strong>du</strong> point de vue de leurfonctionnement (modèles, hypothèses, données en jeu) que de la précision <strong>des</strong> résultats obtenus. Deplus, il s’agissait d’évaluer les coûts inhérents à ces trois outils afin de pouvoir les comparer entreeux, de manière absolue <strong>et</strong> par rapport à leurs avantages <strong>et</strong> efficacité. L’objectif final de ce proj<strong>et</strong> estl’établissement d’une hiérarchie perm<strong>et</strong>tant de choisir l’un <strong>des</strong> outils en fonction de la situationétudiée.Ce rapport s’attache à suivre notre démarche, en présentant tout d’abord les outilsd’évaluation, puis l’utilisation que nous en avons faite, <strong>des</strong> relevés de terrain à l’analyse <strong>des</strong> résultats.Une troisième partie s’attache à la comparaison <strong>des</strong> techniques, tandis que la dernière couvrel’évaluation économique <strong>du</strong> rôle de la forêt de protection à l’aide <strong>du</strong> modèle Rockyfor3D.3
1. Généralités1.1. Présentation <strong>du</strong> siteLa forêt de Grignon (73) située près d’Albertville est un site pilote utilisé dans le cadre <strong>du</strong>proj<strong>et</strong> Interreg forêt de protection. L’objectif final de ce proj<strong>et</strong> est d’évaluer le gain économiquein<strong>du</strong>it par <strong>des</strong> interventions en forêt de protection à partir de 35 chantiers-pilotes dont 19 sontconcernés par l’aléa chute de pierre, les autres par l’aléa avalanche. La forêt de Grignon fait partie<strong>des</strong> 19 forêts concernées par les chutes de pierre..Figure 1: localisation <strong>du</strong> chantier piloteIl s’agit d’un peuplement spatialement hétérogène principalement constitué de francs piedsde chêne <strong>et</strong> d’un taillis vieillissant de châtaignier <strong>et</strong> de charme. On y trouve également de p<strong>et</strong>itestaches d’épicéas <strong>et</strong> de hêtre ainsi que quelques tiges de frêne, merisier, bouleau <strong>et</strong> saule. Une <strong>des</strong>spécificités de ce site est d’avoir <strong>des</strong> zones de départ disséminées dans le peuplement. Le versant,d’une pente de 40-50 °, est situé principalement sur une zone géologique d’écroulement sur éboulisavec présence de micaschistes.1.2. Présentation générale <strong>des</strong> métho<strong>des</strong>1.2.1. Présentation de l’indice de maitrise de l’aléa (IMA).L’indice de maitrise de l’aléa (IMA) est un indice <strong>des</strong>tiné à exprimer la capacité d’unpeuplement forestier à diminuer un aléa naturel. Des IMA sont utilisés dans le cas <strong>des</strong> aléasavalanches <strong>et</strong> chute de pierre.L’IMA – chute de pierres pour un peuplement est obtenu grâce à une table recoupant <strong>des</strong>intervalles de densité (N) <strong>et</strong> de surface terrière (G) <strong>du</strong> peuplement. Les valeurs seuil de G <strong>et</strong> N, ainsique les valeurs d’IMA renvoyées par le tableau, dépendent <strong>du</strong> type, de la fréquence, de l’intensité <strong>et</strong>de la localisation de la zone de départ de l’aléa (par exemple, le tableau de la figure 2 n’est valableque dans le cas de blocs de volume inférieur à 5 m 3 ).L’IMA est un indice variant de 0 à 5 dans le cas de l’aléa chute de blocs. Plus un peuplementest dense <strong>et</strong> atteint une surface terrière élevée, plus son IMA est élevé. Une forêt ayant un IMA de 0n’exerce aucun contrôle sur l’aléa, alors qu’une forêt ayant un IMA de 5 exerce un contrôle élevé. Ils’agit en fait d’une notation relative <strong>des</strong> peuplements les uns par rapport aux autres. Un IMA de 5n’indique par contre pas que la forêt exerce un contrôle 5 fois meilleur qu’une forêt ayant un indicede 1, mais seulement qu’elle exerce un contrôle plus fort sur l’aléa.4
Surfac<strong>et</strong>errière(m²/ha)Chute de pierresDensité (N/ha)50020 0 4 5Figure 2: tableau de calcul de l'IMALes paramètres d’entrée nécessaires au calcul de l’IMA, N <strong>et</strong> G pour le peuplement, peuventsoit être obtenus à partir de relevés sur le terrain, comme dans notre cas, soit être obtenu par photointerprétationou données laser (LIDAR).1.2.2. Présentation de l’outil RockFor NET (RFN).RockFor NET est un outil, disponible en libre accès sur le site www.ecorisq.org, perm<strong>et</strong>tant dequantifier rapidement la capacité de protection d’une forêt contre les chutes de blocs. Le principe <strong>du</strong>modèle est de considérer la forêt comme <strong>des</strong> rangées d’arbres mimant un fil<strong>et</strong> contre les chutes depierre : les arbres dans une rangée seront espacés de 0.9 fois la taille <strong>du</strong> bloc qui pourrait tomber.C<strong>et</strong> outil utilise le principe de la ligne d’énergie de 31° (angle observé quand une pierre tombe d’unepente non-boisée de 38°) pour calculer l’énergie totale développée par le rocher puis calculel’énergie dissipée par les obstacles rencontrés. C’est pour cela que RockFor NET calcule la surfac<strong>et</strong>errière rencontrée théoriquement par la pierre. Celle-ci est comparée à la surface terrière requisepour avoir une protection idéale de la forêt.Le mieux est de pouvoir travailler par transect avec une zone de départ à l’amont de celui-ci.Des plac<strong>et</strong>tes sont requises pour relever les données nécessaires au bon fonctionnement <strong>du</strong> logiciel.Il s’agit d’une part, <strong>des</strong> dimensions, densité <strong>et</strong> forme <strong>du</strong> plus gros bloc provenant de la zone dedépart <strong>et</strong> d’autre part, de données moyennes sur le transect : densité <strong>du</strong> peuplement, surfac<strong>et</strong>errière totale ou diamètre moyen, répartition <strong>des</strong> essences présentes <strong>et</strong> <strong>des</strong>cription <strong>du</strong> versant(pente, longueur de la zone boisée, distance d’entrée dans le peuplement <strong>et</strong> hauteur maximale de lafalaise).A partir de ces données, RockFor NET calcule un aléa rési<strong>du</strong>el probable (ARP) de chutes depierre, le but étant qu’il soit inférieur à 1%. En eff<strong>et</strong>, considérant que le risque 0 n’existe pas, l’ARPne sera jamais nul mais inférieur à 1%. Si c’est le cas, alors le peuplement est considéré comme étantefficace dans la protection contre les chutes de blocs. Dans le cas contraire, un peuplementthéorique donne la densité de peuplement nécessaire pour obtenir un ARP
Pour chaque cellule définie comme cellule de départ (voir la <strong>des</strong>cription <strong>des</strong> rasters pour lechoix de telles cellules), un nombre n (choisi par l’utilisateur) de chutes de blocs est simulé, avec unehauteur initiale (<strong>et</strong> donc une vitesse initiale) positive ou nulle.La trajectoire d’un bloc consiste en l’ensemble <strong>des</strong> chutes libres, rebonds <strong>et</strong> impacts qu’ilréalise (cf. figure 3) ; le modèle ne perm<strong>et</strong> pas de prendre en compte les roulements le long de lapente, <strong>et</strong> ces roulements sont donc modélisés comme une série de micro-rebonds, calculés sur lemême modèle que les rebonds, modèle décrit ci-après.Lors d’un rebond, le point d’impact est repéré (car, en tout instant de la chute, lescoordonnées X (est-ouest), Y (nord-sud), Z (hauteur) <strong>du</strong> bloc sont connus), <strong>et</strong> on y récupère lescaractéristiques de la pente <strong>et</strong> la vitesse d’arrivée <strong>du</strong> bloc. Un rebond ou un impact (arrivée <strong>du</strong> blocsur un arbre ou un ouvrage (génie civil, bâtiment) provoque ensuite une déviation de la trajectoire,fonction <strong>du</strong> point d’impact <strong>et</strong> de la vitesse d’arrivée au point. Ceci s’exprime au travers <strong>du</strong> calcul d’unangle, perm<strong>et</strong>tant de modifier la trajectoire <strong>du</strong> bloc <strong>et</strong> ainsi de continuer la modélisation <strong>et</strong> le calculde la suite de la trajectoire selon un « schéma de décision » (voir figure modèle).Figure 3: organigramme de Rockyfor3DLe modèle de trajectoires de Rockyfor3D se base sur différents postulats <strong>et</strong> algorithmes. Toutd’abord, la forme <strong>du</strong> bloc est ré<strong>du</strong>ite à quatre (rectangulaires, ellipsoïdaux, sphériques ou disque)pour calculer volume <strong>et</strong> moment d’inertie <strong>du</strong> bloc, <strong>du</strong> fait de l’absence d’algorithmes pour <strong>des</strong>formes plus complexes. Ensuite, le modèle de chute est celui d’une chute libre paraboliqueuniformément accéléré dans l’air, calculé à l’aide d’un algorithme standard.En ce qui concerne les rebonds, huit algorithmes perm<strong>et</strong>tent de calculer la vitesseconsécutive à un rebond (impact <strong>du</strong> bloc sur la pente) à partir <strong>des</strong> vitesses d’arrivée tangentielle <strong>et</strong>normale <strong>et</strong> de la profondeur de pénétration (fonction <strong>du</strong> type de sol). Par ailleurs, un bloc peutperdre de l’énergie cinétique par impact contre un arbre ou un ouvrage. C<strong>et</strong>te dissipation estfonction de la position de l’impact sur les troncs (hauteur <strong>et</strong> localisation par rapport à l’axe central),<strong>du</strong> diamètre <strong>et</strong> <strong>du</strong> type d’arbre rencontré (résineux ou feuillu).6
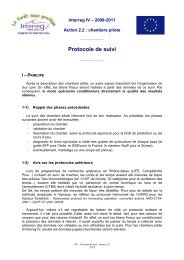
Enfin, le modèle calcule la direction de chute prise par le bloc dans chaque cellule, qui peutêtre constante ou déviée par un rebond ou un impact. L’angle de déviation après un rebond sur lasurface de la pente est déterminé par la topographie, par la direction de chute <strong>du</strong> bloc avant lerebond <strong>et</strong> par sa vitesse. Pour un impact, la trajectoire d’un bloc peut être déviée latéralementjusqu’à 76° par rapport à sa direction initiale <strong>et</strong> c<strong>et</strong>te déviation dépend de la position de l’impact surle tronc de l’arbre.2. Phase de terrain <strong>et</strong> d’acquisition <strong>des</strong> données2.1. Préparation de la phase de terrain <strong>et</strong> données nécessairesLa première chose à m<strong>et</strong>tre en place lors de la préparation de la phase de terrain est unéchantillonnage <strong>des</strong> plac<strong>et</strong>tes où seront réalisés les relevés. Il est possible de réaliser un maillage oude fonctionner par répartition aléatoire simple.b) principe de l ’inventaire par échantillonnageMesure sur un échantillon de plac<strong>et</strong>tes = « extrait ou sondage »représentatif de la parcelleRépartition aléatoiresystématiqueRépartition aléatoire simpleMaillage carré ourectangulaireDifficile à m<strong>et</strong>tre en placePeu utiliséFigure 4: comparaison <strong>des</strong> types d'échantillonage. Source: I. VinklerNous avons, quant à nous, choisi de reprendre le maillage déjà mis en place par l’ONF sur laparcelle de Grignon, <strong>et</strong> ce dans un souci de gain de temps. En eff<strong>et</strong> l’ONF travaillant sur c<strong>et</strong>teparcelle, <strong>des</strong> plac<strong>et</strong>tes de surface fixe avaient déjà été mises en place. Il s’agit d’un maillage nord-sudavec 26 plac<strong>et</strong>tes numérotées <strong>et</strong> espacées de 50 m.Nous avons choisi ce maillage dans un souci évident de gain de temps bien qu’il dénoteplusieurs gros désavantages : Tout d’abord il ne s’agit pas d’un maillage dans le sens de la pente, ce qui rendcompliquée la recherche <strong>des</strong> plac<strong>et</strong>tes signalisées sur le terrain, <strong>et</strong> qui complique aussi la mise enplace de transects lors de l’utilisation de l’IMA <strong>et</strong> de Rockfor NET par transect. Les plac<strong>et</strong>tes sont signalées sur le terrain, non pas par un piqu<strong>et</strong> en fer au centre dela plac<strong>et</strong>te, mais par le numéro de la plac<strong>et</strong>te écrit à la peinture sur un arbre à proximité de laplac<strong>et</strong>te. Cela implique tout d’abord qu’il est possible de r<strong>et</strong>rouver « à peu près » la plac<strong>et</strong>te, <strong>et</strong> nonpas de r<strong>et</strong>rouver précisément son centre. D’autre part, le fait de marquer un arbre intro<strong>du</strong>it un biaisdans l’inventaire : l’arbre marqué se r<strong>et</strong>rouve systématiquement pris en compte dans la plac<strong>et</strong>te, orc<strong>et</strong> arbre, choisi par l’ONF, est souvent un arbre de diamètre important. Par ailleurs un nombreimportant de plac<strong>et</strong>tes n’étaient pas signalées.Afin de s’affranchir <strong>du</strong> biais exposé plus haut <strong>et</strong> de ne pas avoir à rechercher pendant <strong>des</strong>heures les arbres signalisés, nous avons choisi de partir d’une plac<strong>et</strong>te signalisée en bas de pente, <strong>et</strong>de trouver les suivantes à l’aide d’une boussole <strong>et</strong> d’un altimètre. C<strong>et</strong>te méthode contient elle aussi<strong>des</strong> imprécisions, ne serait-ce que <strong>du</strong> fait de l’imprécision <strong>des</strong> altimètres utilisés <strong>et</strong> <strong>des</strong> altitu<strong>des</strong>recherchées, que nous avions obtenues à partir <strong>du</strong> modèle numérique de terrain. Cependant, sa7
apidité de mise en place <strong>et</strong> l’impossibilité de fonctionner avec <strong>des</strong> GPS, peu efficaces sous couvert <strong>et</strong>en versant Nord, nous ont convaincu à l’utiliser.Nous avons donc imprimé <strong>des</strong> cartes de la parcelle à partir <strong>du</strong> SCAN 25, cartes sur lesquellesétaient localisées les parcelles, leurs coordonnées <strong>et</strong> leurs altitu<strong>des</strong>.La préparation de la phase de terrain a également pour objectif de m<strong>et</strong>tre en place leprotocole, aussi précis que possible, qui perm<strong>et</strong> d’acquérir l’ensemble <strong>des</strong> données nécessaires àl’utilisation <strong>des</strong> outils IMA, Rockfor NET , <strong>et</strong> Rockyfor3D. Un protocole précis doit garantir que, quel quesoit le nombre de plac<strong>et</strong>tes, le nombre de parcelles, ou le nombre de personnes différenteseffectuant les relevés, on obtienne <strong>des</strong> résultats similaires dans leur forme, <strong>et</strong> donc comparables.Ce protocole est r<strong>et</strong>ranscrit sous forme d’une fiche de terrain, claire <strong>et</strong> complète, dont lerenseignement intégral garantit l’obtention de toutes les données de terrain nécessaires par la suite.Dans notre cas, la fiche de terrain contenait l’ensemble <strong>des</strong> informations listées ci-<strong>des</strong>sous : Nom <strong>du</strong> rédacteur <strong>et</strong> N° de la plac<strong>et</strong>te : noter le nom <strong>du</strong> rédacteur peutperm<strong>et</strong>tre d’expliquer l’origine d’un biais constaté à l’analyse <strong>des</strong> résultats ; il peut en eff<strong>et</strong>être dû à <strong>des</strong> différences dans la méthode de relevé entre deux agents, <strong>et</strong> ce malgré leprotocole établi. Date, heure d’arrivée sur la plac<strong>et</strong>te <strong>et</strong> heure de départ : les heures d’arrivée<strong>et</strong> de départ perm<strong>et</strong>tent de calculer le temps de relevé par plac<strong>et</strong>te, dont on peut faire lamoyenne sur l’ensemble de la parcelle. Ce temps, variable selon le type de plac<strong>et</strong>te, perm<strong>et</strong>de comparer les coûts de mise en place de chacun <strong>des</strong> types <strong>et</strong> aide donc au choix <strong>du</strong> « bon »type de plac<strong>et</strong>te. Altitude <strong>et</strong> pente Type de sol rencontré : choix entre les 7 types de sol en entrée deRockyfor3D- 1. Rivière, marécage, mat. dans lequel bloc pénètre profondément- 2. Sol lâche (prof>100cm)- 3. Sol lâche (prof
Mesure <strong>des</strong> blocs présents sur la parcelle : mesure <strong>des</strong> plus gros blocs s<strong>et</strong>rouvant aux alentours <strong>du</strong> centre de la parcelle. On mesure entre 0 <strong>et</strong> 5 blocs par plac<strong>et</strong>teselon le nombre de blocs présents (0 : aucun blocs sur la plac<strong>et</strong>te ; 5 : nombreux blocs donton ne mesure que les 5 plus gros). Estimation de la forme <strong>des</strong> blocs : choix entre 4 formes : bloc rectangulaire,ellipsoïdale, sphérique ou à forme de dalle. Type de zone vis-à-vis <strong>du</strong> mouvement <strong>des</strong> blocs : zone de départ de blocs,zone de transit ou zone de dépôt. A noter qu’une même zone peut être à la fois zone dedépart <strong>et</strong> de transit. Hauteur maximale en mètre de la falaise : Il s’agit d’une donnée nécessaire àl’outil Rockfor NET relevable dans les zones de départ. Données de peuplement : nous avons choisi de relever, pour le peuplement,<strong>des</strong> données de distance au centre de la plac<strong>et</strong>te <strong>et</strong> de diamètre de l’arbre concerné. Le typede plac<strong>et</strong>te mise en place pour ces données de peuplement sera détaillé en II. b. Estimation de la répartition <strong>des</strong> différentes essences, en % <strong>du</strong> nombre d<strong>et</strong>iges.En annexe, les feuilles de terrain utilisées pour nos relevés2.2. Différents types de plac<strong>et</strong>tesIl existe trois gran<strong>des</strong> catégories de plac<strong>et</strong>tes pour réaliser <strong>des</strong> inventaires paréchantillonnage. Chacune de ces métho<strong>des</strong> a <strong>des</strong> avantages <strong>et</strong> <strong>des</strong> inconvénients, un choix doit êtrefait en fonction <strong>des</strong> paramètres dendrométriques qui seront utilisés <strong>et</strong> de leur importance, de laprécision voulue, <strong>des</strong> ressources financières prévues à c<strong>et</strong> eff<strong>et</strong> <strong>et</strong> <strong>du</strong> temps imparti pour l’opérationde terrain.2.2.1. Les plac<strong>et</strong>tes à surface fixeLes relevés sont réalisés sur une surface définie au sein d’un rectangle ou d’un cercle. Laforme a peu d’importance mais le cercle est de plus en plus utilisé (délimitation plus rapide). Lesdistances sont délimitées grâce à un télémètre laser pour plus de rapidité. Dans le cas de forte penteil est nécessaire d’appliquer un facteur de correction aux distances à mesurer.Les plac<strong>et</strong>tes à surface fixe sont particulièrement adaptées au suivi <strong>du</strong> renouvellement enperche ou semis, en termes de densité. L’effort d’échantillonnage doit être adapté à la densité (choix<strong>du</strong> rayon), ce qui peut nécessiter un pré-inventaire. L’inconvénient <strong>des</strong> plac<strong>et</strong>tes à surface fixe résidedans la variabilité <strong>du</strong> temps passé sur chaque plac<strong>et</strong>te, qui est dépendant de la densité.9
2.2.2. Les plac<strong>et</strong>tes à angle fixe ou plac<strong>et</strong>tes relascopiquesC<strong>et</strong>te technique perm<strong>et</strong> de limiter les relevés aux arbres sélectionnés au travers d’un angleconstant. Ainsi, chaque classe de diamètre est inventoriée sur une superficie proportionnelle à sasurface terrière.L’avantage sur les plac<strong>et</strong>tes à surface fixe est que ce système perm<strong>et</strong> d’inventorier plus degros bois. Les plac<strong>et</strong>tes relascopiques sont rapi<strong>des</strong> <strong>et</strong> très performantes pour l’évaluation <strong>du</strong> capitalen volume. En revanche elles ne perm<strong>et</strong>tent pas de connaître la densité.2.2.3. Les plac<strong>et</strong>tes PCQM (Point-Centered Quarter M<strong>et</strong>hod)C<strong>et</strong>te méthode se différencie <strong>des</strong> autres par le fait de mesurer un nombre d’arbres fixe parplac<strong>et</strong>te. Elle consiste à diviser la plac<strong>et</strong>te en quatre quarts, <strong>et</strong> à mesurer l’indivi<strong>du</strong> le plus proche <strong>du</strong>centre dans chacun de ces quarts. Il est possible d’échantillonner plusieurs populations en uneopération. Dans ce cas il suffit de mesurer un indivi<strong>du</strong> par population dans chaque quart.La division de la plac<strong>et</strong>te en quatre quarts se fait à la boussole en utilisant les quatre pointscardinaux. Pour chacune <strong>des</strong> populations choisies <strong>et</strong> dans chacun <strong>des</strong> quarts, on mesure la distanceentre le centre de la plac<strong>et</strong>te <strong>et</strong> l’indivi<strong>du</strong>. Comme pour les plac<strong>et</strong>tes à surface fixe, la distance doitêtre mesurée à l’horizontale. Un facteur de correction doit donc être appliqué dans le cas de fortepente.Figure 5: principe de la méthode PCQMC<strong>et</strong>te méthode présente l’avantage d’être rapide <strong>et</strong> d’avoir un temps de mesure constant surchaque plac<strong>et</strong>te. L’autre avantage est de pouvoir échantillonner plusieurs populations en une seuleopération.En peuplement hétérogène, le PCQM fournit la densité la plus juste pour un effort moindre(un bon coefficient de variation pour un faible effort d’échantillonnage) <strong>et</strong> ce, même dans le casd’une distribution agrégée <strong>des</strong> indivi<strong>du</strong>s (cas <strong>du</strong> taillis). En revanche c<strong>et</strong>te méthode n’est pas adaptéedans le cas de peuplements homogènes.Les formules adoptées pour le traitement <strong>des</strong> données supposent une distribution aléatoire<strong>des</strong> indivi<strong>du</strong>s.10
Estimation de la densité totale :- Première méthode :Dans c<strong>et</strong>te formule :N = densité à l’hectaren = nombre de plac<strong>et</strong>tesi = indice de la plac<strong>et</strong>tej = indice <strong>du</strong> quartierR ij = distance <strong>du</strong> centre de la plac<strong>et</strong>te au premier arbre pour la plac<strong>et</strong>te i <strong>et</strong> le quartier jLa surface totale est exprimée par : / 4 ; le coefficient 10000 perm<strong>et</strong> d’exprimer ladensité à l’hectare ; (4n-1) remplace 4n pour corriger le biais de l’estimateur.- Seconde méthode :Dans c<strong>et</strong>te formule :K = nombre d’indivi<strong>du</strong>s que l’on échantillonne par quartier.Si k = 1, on r<strong>et</strong>rouve la formule de la première méthode à l’exception que l’estimateur estdifférent. C<strong>et</strong> estimateur perm<strong>et</strong> le calcul d’une densité par plac<strong>et</strong>te.Densité par sous-population :Il faut calculer le pourcentage dans l’échantillon d’indivi<strong>du</strong>s de la sous-population concernée.Les pourcentages obtenus, appliqués à la densité totale perm<strong>et</strong>tent d’obtenir la densité de la souspopulationen nombre de tiges.Calcul <strong>du</strong> poids de chaque indivi<strong>du</strong> échantillonné :L’intérêt de calculer le poids de chaque indivi<strong>du</strong> réside dans la possibilité de faire le lien avecles résultats d’autres types de plac<strong>et</strong>tes. Le poids d’un indivi<strong>du</strong> est donc un coefficient qui perm<strong>et</strong> depasser d’une variable unitaire à la même variable ramenée à l’hectare.Poids de l’indivi<strong>du</strong> pour l’échantillonnage :11
Poids de l’indivi<strong>du</strong> pour la plac<strong>et</strong>te :Type deplac<strong>et</strong>teSurfacefixeEstimation de la surface terrièreIl suffit de faire le pro<strong>du</strong>it de la densité par la surface terrière.Bilan comparatif <strong>et</strong> choix de la méthodeIndicateursdendrométriquesDensité, surfac<strong>et</strong>errière, autredonnées indivi<strong>du</strong>Angle fixe Surface terrière Rapide <strong>et</strong>performantPCQM Densité, surfac<strong>et</strong>errière, autredonnées indivi<strong>du</strong>Avantages Inconvénients Durée/plac<strong>et</strong>te(cas de Grignon)Bonne estimation - Surface à adapter à 12 mnde densité la densité- Temps de mesurevariableAucune donnée de45 s- Rapidité- Temps demesure constant- Efficacitéqualité/tempsdensité- Uniquement enpeuplementhétérogène <strong>et</strong> taillis7 mnLes indicateurs dendrométriques nécessaires à notre travail sont la densité, les diamètres <strong>et</strong>la surface terrière. La forêt de Grignon est composée de taillis <strong>et</strong> de futaie, à distribution hétérogène.Notre objectif est de réaliser un inventaire à moindre coût, <strong>et</strong> donc de privilégier la rapidité <strong>des</strong>différentes opérations.Compte tenu <strong>des</strong> critères précédents, notre choix s’oriente vers <strong>des</strong> plac<strong>et</strong>tes PCQM car cesdernières perm<strong>et</strong>tent de relever les densités <strong>et</strong> surfaces terrières sur un laps de temps plus court. Demême, le temps de mesure constant entre les plac<strong>et</strong>tes est adapté à une estimation exacte <strong>du</strong> coûtde l’inventaire.Le fait que le peuplement de Grignon soit très hétérogène en terme de diamètre <strong>des</strong> tigesnous a con<strong>du</strong>it à adapter la méthode PCQM en mesurant 2 indivi<strong>du</strong>s par quart (deux populations :p<strong>et</strong>it bois de 7,5 à 27,5 cm <strong>et</strong> gros bois de 27,5 cm <strong>et</strong> plus). C<strong>et</strong>te méthode, adaptée au peuplement,nous a permis d’être plus juste dans notre estimation <strong>des</strong> diamètres <strong>et</strong> de la surface terrière enévitant une sous-estimation <strong>des</strong> gros bois.2.3. Création <strong>des</strong> rasters <strong>et</strong> délimitation de zones d’étudeLes 10 rasters nécessaires pour utiliser Rockyfor3D sont les suivants: MNT (modèle numérique de terrain), représentant la topographie <strong>du</strong> terrain entre 0 <strong>et</strong>8 850,00 m masse volumique <strong>des</strong> blocs (définie à partir de la géologie), entre 0 <strong>et</strong> 3300 kg.m 3 dimensions <strong>du</strong> projectile (hauteur, largeur, longueur, respectivement d1, d2, d3, soit troisrasters distincts), entre 0 <strong>et</strong> 100,00 m12
forme <strong>du</strong> projectile, selon 5 types (indéfinie, rectangulaire, ellipsoïdal, sphérique, disque) rugosité de la surface (dans 70 %, 20 % <strong>et</strong> 10 % <strong>des</strong> cas, soit trois rasters distincts),représentée par une carte <strong>des</strong> hauteurs d’obstacle représentatif (MOH) rencontré par le projectile,entre 0 <strong>et</strong> 100,0 m type de sol, représentant l’élasticité de la surface de la pente, selon 6 types correspondant à<strong>des</strong> gammes de coefficient de restitution normal (R n )Toutes les opérations décrites ci-après ont été réalisées sous ArcGIS.Le MNT (fourni à partir <strong>des</strong> données de l’IGN ou par utilisation <strong>du</strong> LIDAR) contient lesdonnées topographiques de la zone d’étude ; cependant, celui qui nous a été fourni avait pourrésolution 20 mètres, ce qui est trop imprécis pour Rockyfor3D. Nous avons donc décidé d’améliorerce MNT. Nous avons tout d’abord converti le MNT en un vecteur (shapefile) composé de points, puis,à l’aide <strong>du</strong> mo<strong>du</strong>le « 3D Analyst », créé un TIN (triangulated irregular n<strong>et</strong>work) à partir de points(issus <strong>du</strong> MNT <strong>et</strong> <strong>des</strong> relevés de terrain, par plac<strong>et</strong>te <strong>et</strong> pour différents points <strong>du</strong> sentier), de soft line(les courbes de niveaux numérisés à partir <strong>du</strong> scan 25) <strong>et</strong> d’une hard line (le tracé <strong>du</strong> sentier forestieren lui-même). Puis ce TIN a été transformé en raster.De plus, à partir <strong>des</strong> données relevées sur le terrain, nous avons numérisés <strong>des</strong> polygoneshomogènes pour chaque paramètre, sur la base d’un buffer autour de chaque plac<strong>et</strong>te (buffer de 25mètres dans notre cas, les plac<strong>et</strong>tes étant espacées de 50 mètres). Les polygones sont ensuiteconvertis en rasters à l’aide de l’outil « Polygon to raster ». Les données ayant été relevées surchaque plac<strong>et</strong>te, le modèle proposera <strong>des</strong> chutes de bloc pour chaque cellule de la zone d’étude ; or,seule une partie de ces cellules peut effectivement être considérée comme zone de départ. Il fautdonc définir <strong>des</strong> zones de non-départ, par exemple en attribuant la valeur 0 à l’une <strong>des</strong> dimensionsde bloc. Pour cela, on crée un raster <strong>des</strong> zones de départ basé sur la pente <strong>et</strong> les relevés, en 0 <strong>et</strong> 1,que l’on croise avec la couche <strong>des</strong> épaisseurs de blocs. Les zones de départ correspondent à <strong>des</strong>zones dont la pente est supérieure à un angle (en degré) fonction de la résolution de la couch<strong>et</strong>opographique (MNT), selon la formule suivante (issue <strong>du</strong> proj<strong>et</strong> européen Provialp, Cemagref <strong>et</strong>Arpa, 2008).Par ailleurs, il est possible de prendre en compte dans l’outil Rockyfor3D la présence d’unpeuplement forestier sur la trajectoire <strong>des</strong> chutes de bloc, à l’aide d’un raster décrivant lepourcentage de résineux par cellule, complété soit par quatre rasters décrivant le peuplement <strong>et</strong>perm<strong>et</strong>tant de recréer un peuplement aléatoirement (densité, diamètre moyen, écart-standard surle diamètre <strong>et</strong> type de peuplement) soit par un fichier regroupant les positions <strong>et</strong> diamètre chaquearbre dans le peuplement (données de type LIDAR ou inventaire en plein).Enfin, RF3D nécessite, pour fonctionner correctement, que tous les rasters possèdent lamême extension <strong>et</strong> la même résolution (au pas de 10 mètres ici, car il s’agit de la résolution <strong>du</strong> MNT).A l’aide <strong>du</strong> mo<strong>du</strong>le « Spatial Analyst », l’ensemble <strong>des</strong> rasters est donc recalculé sur une empriselégèrement supérieure à celle de la zone d’étude (cf. cartes en annexe).Les différents rasters sont enfin exportés au format ASCII (format .asc lisible par tous leslogiciels de traitement de texte), dont un exemple est donné ci-<strong>des</strong>sous.ncols 112nrows 54xllcorner 914841yllcorner 2080420cellsize 10NODATA_value -9999330 330 330 330 330330 330 330 13
De même, dans le cadre de l’utilisation de l’outil Rockfor NET , nous avons redécoupé notreparcelle en transects pris dans le sens de la pente afin de pouvoir prendre en compte la menacemaximale. Puis nous avons pris en compte toutes les zones de départ présentes dans chacun <strong>des</strong>transects. Pour chacune de ces zones, nous avons calculé un ARP en prenant, pour chaque donnéedemandée, une moyenne <strong>des</strong> données de la partie <strong>du</strong> transect positionnée à l’aval de la zone dedépart. Les différents ARP d’un même transect sont alors comparés <strong>et</strong> seul l’ARP maximal est gardé.On obtient, par c<strong>et</strong>te méthode, un ARP par transect malgré les nombreuses zones de départprésentes à l’intérieur <strong>du</strong> peuplement. Ces mêmes transects ont été repris pour le calcul de l’IMA.En contrepartie, c<strong>et</strong>te méthode est plus lente lors de l’acquisition <strong>des</strong> données sur ordinateurcar il ne faut pas seulement rentrer tous nos résultats mais aussi faire les calculs par transects <strong>et</strong> parzone de départ, sachant qu’il peut y avoir autant de zones de départ que de plac<strong>et</strong>tes. Il faut, pourchacune d’entre elle, faire une moyenne d’une partie <strong>des</strong> données <strong>des</strong> plac<strong>et</strong>tes situées dans lemême transect en contrebas de notre zone de départ (pente, %essences, N, Dm), une somme decertaines autres (longueur de bande boisée), prendre le maximum de certaines autres (dimensions<strong>des</strong> blocs), ou encore prendre la valeur de notre zone de départ (hauteur de la falaise). Tout celademande la mise en place d’une méthode optimale d’acquisition <strong>des</strong> données pour éviter de perdre<strong>du</strong> temps.Figure 6: cartographie <strong>des</strong> zones de départ14
2.4. LIDARLe LIDAR (de l’anglais light d<strong>et</strong>ection and ranging) est un système aéroporté de laser, quienvoie <strong>des</strong> impulsions au sol à raison de un point par hectares, impulsions dont les différents échosperm<strong>et</strong>tent, en revenant vers l’avion, de définir différentes données. La première série de cesdonnées forme le modèle numérique de terrain (MNT), à partir <strong>du</strong> dernier train d’on<strong>des</strong> reçu parl’avion. De même, à partir de la première série d’échos reçue, un modèle numérique de surface(MNS) est établi. La différence entre ces deux modèles perm<strong>et</strong> l’obtention de la hauteur de lacanopée dans sa globalité, exprimée au travers <strong>du</strong> modèle numérique de hauteur de la canopée(MNH).Figure 7: exemple de données brutes issues <strong>du</strong> LIDAR. Source : F. BergerFigure 8: représentation <strong>des</strong> différents modèles obtenus grâce au LIDAR. Source : P. Obst<strong>et</strong>arC<strong>et</strong>te technique perm<strong>et</strong> d’obtenir <strong>des</strong> données très précises sur le MNT <strong>et</strong> le MNS,opérations par ailleurs automatisées <strong>et</strong> donc rapi<strong>des</strong> <strong>et</strong> efficaces. Cependant, en ce qui concerne lepeuplement forestier, le LIDAR m<strong>et</strong> en évidence les apex <strong>des</strong> arbres, mais ne prend en compte queles arbres les plus hauts <strong>et</strong> dominants, éliminant par là le sous-étage. Il n’est pas alors possibled’utiliser le LIDAR comme méthode de reconnaissance indivi<strong>du</strong>elle <strong>des</strong> arbres, <strong>et</strong> il vaut mieuxfavoriser les données par peuplement homogène (hauteur moyenne, densité évaluée à partir de lasurface terrière <strong>et</strong> <strong>des</strong> strates telles que définies par le GSM, d’après Grisier <strong>et</strong> al., 2007). Il faut noterque le problème de l’indivi<strong>du</strong>alisation <strong>des</strong> arbres relevés fait actuellement l’obj<strong>et</strong> de recherche ausein <strong>du</strong> CEMAGREF de Grenoble.En ce qui concerne le prix d’une telle technique, il est très élevé, de par sa nature même(nécessité d’un avion) mais aussi de par sa faible utilisation en milieu forestier. 3 000 € sont15
nécessaires pour le seul décollage de l’appareil, à quoi il faut ajouter un prix à l’hectare fonction <strong>du</strong>nombre d’hectares couverts par la campagne (plus ce nombre d’hectares augmente <strong>et</strong> plus le coûtdiminue). Par exemple, pour une campagne couvrant 100 km², le prix est de 4,72 €.ha -1 , soit un totalde 5,02 €.ha -1 . Cependant, ce type de données est idéal pour le travail sous Rockyfor3D (MNT au pasde 1 m, position de chaque arbre avec sa hauteur <strong>et</strong> éventuellement son diamètre), <strong>et</strong> pourra êtreutilisé ultérieurement. Nous n’avons d’ailleurs pas pris en compte ce coût dans nos calculs, car nousavons estimé qu’il serait amorti pour plusieurs travaux au cours de l’année <strong>et</strong> donc peu pertinent àcalculer sur une parcelle seule. Le LIDAR constitue donc un investissement intéressant dans ce cadre.3. Analyse <strong>des</strong> métho<strong>des</strong>3.1. Résultats obtenus3.1.1. IMANous avons décidé de déterminer les indices de maitrise de l’aléa pour chaqueplac<strong>et</strong>te d’une part, <strong>et</strong> selon <strong>des</strong> transects disposés selon l’axe NE-SO, axe quasimentperpendiculaire à la pente d’autre part. On a divisé l’ensemble de la parcelle en 8 transects, tel qu’il aété expliqué plus haut. L’IMA pour chaque transect est obtenu en calculant la moyenne <strong>des</strong> densités<strong>et</strong> <strong>des</strong> surfaces terrières sur les plac<strong>et</strong>tes incluses dans ce transect, <strong>et</strong> en appliquant ces valeurs à latable d’IMA.Pour le calcul d’IMA par plac<strong>et</strong>te, on obtient les résultats suivants :- 2 plac<strong>et</strong>tes d’IMA minimum (O) : plac<strong>et</strong>tes 11 <strong>et</strong> 24.- 1 plac<strong>et</strong>te d’IMA de 1 : plac<strong>et</strong>te 5.- 8 plac<strong>et</strong>tes d’IMA de 3 : plac<strong>et</strong>tes 2, 3, 4, 6, 9, 16, 17, 22.- 2 plac<strong>et</strong>tes d’IMA de 4 : plac<strong>et</strong>tes 1 <strong>et</strong> 18.- 13 plac<strong>et</strong>tes d’IMA de 5 : plac<strong>et</strong>tes 7, 8, 10, 12, 13, 14, 15, 19, 20, 21, 23, 25, 26.Figure 9: carte <strong>des</strong> IMA par plac<strong>et</strong>tesOn constate donc tout d’abord une très forte hétérogénéité <strong>des</strong> IMA à l’échelle de laparcelle : on obtient quasiment l’ensemble <strong>des</strong> IMA possibles, depuis les plac<strong>et</strong>tes où le peuplementn’exerce aucun contrôle sur l’aléa chute de bloc (IMA de 0) jusqu’à celle où ce contrôle est maximal.C<strong>et</strong>te hétérogénéité <strong>des</strong> IMA par plac<strong>et</strong>te reflète bien la forte hétérogénéité de peuplementconstatée sur le terrain. On constate ensuite que la moitié <strong>des</strong> parcelles ont un indice de maitrised’aléa optimal, <strong>et</strong> que 1/3 d’entre elles ont un aléa moyen.16
Si on regarde la disposition spatiale <strong>des</strong> différentes valeurs d’aléa, on constate que la moitiéNord-Est de la parcelle est majoritairement constituée de plac<strong>et</strong>tes d’indice de 3 (en orange sur lacarte ci-<strong>des</strong>sus), <strong>et</strong> que la moitié sud-ouest est, pour sa part, constituée de plac<strong>et</strong>tes d’IMA de 5 (envert sur la carte). Selon ces indices IMA, la moitié sud-ouest est ainsi plus apte à diminuer l’aléa chutede blocs que la moitié nord-est.Si on s’intéresse maintenant à l’analyse <strong>des</strong> IMA par transect, on constate une fortediminution <strong>des</strong> disparités à l’échelle de la parcelle : tous les transects sauf deux ont un IMA de 5, lesdeux restants ayant un IMA de 3.Ce gommage <strong>des</strong> hétérogénéités est dû au fait que parmi les plac<strong>et</strong>tes ayant <strong>des</strong> indices de 5,plusieurs d’entre elles ont <strong>des</strong> N <strong>et</strong> G très supérieurs aux valeurs seuils nécessaires pour appartenir àla classe d’IMA de 5. Ainsi, en prenant l’exemple <strong>du</strong> transect 7, constitué <strong>des</strong> plac<strong>et</strong>tes 11 d’IMA de 0,18 d’IMA de 4 <strong>et</strong> 23 d’IMA de 5, on obtient un transect d’IMA de 5. Ceci est dû à la très forte densitélocale (N=2162 arbres/ha) <strong>et</strong> à la surface terrière élevée (G=38m²/ha) constatées sur la plac<strong>et</strong>te 23.On peut alors se poser la question de la validité <strong>des</strong> résultats par transect, car un transect d’IMAoptimal peut, en fait, être constitué d’une plac<strong>et</strong>te de quelques dizaines de mètres très dense <strong>et</strong>peuplée de gros arbre <strong>et</strong> d’autre plac<strong>et</strong>tes peu dense, <strong>et</strong> peu aptes à exercer un contrôle sur l’aléa.C<strong>et</strong>te hétérogénéité, possible au sein d’un même transect, nous a amené à m<strong>et</strong>tre de côté l’IMA partransect peu apte, selon nous, à donner une information valable sur l’aléa en aval <strong>du</strong> transect. Ceciest d’autant plus vrai dans notre cas : si une zone de départ située au sein d’un transect se trouve au<strong>des</strong>susd’une plac<strong>et</strong>te en bas de pente <strong>et</strong> ayant un IMA faible, l’aléa aval <strong>du</strong> transect sera très élevé,alors que par ailleurs l’IMA <strong>du</strong> transect considéré pourra être élevé.Néanmoins, comme on peut le voir sur la carte ci-<strong>des</strong>sous, on r<strong>et</strong>rouve les tendancesconstatées dans l’étude <strong>des</strong> IMA par plac<strong>et</strong>tes : la moitié sud-ouest est exclusivement constituée d<strong>et</strong>ransects ayant <strong>des</strong> IMA de 5, ce qui indique, à priori, une très bonne capacité de c<strong>et</strong>te partie de laparcelle à diminuer le risque de chute de blocs. La moitié nord-est, quant à elle, présente 2 transectssur 4 ayant un IMA de 3 ; ceci correspond à la plus faible capacité de maitrise de l’aléa constatéedans c<strong>et</strong>te zone lorsque l’on s’est intéressé aux IMA par plac<strong>et</strong>te.Figure 10: carte <strong>des</strong> IMA par transect17
Pour conclure, l’intérêt de travailler avec un IMA par plac<strong>et</strong>te est d’obtenir une cartographiede l’aptitude, par zone, de la forêt à diminuer l’aléa chute de bloc afin de déterminer <strong>des</strong> zonesd’intervention prioritaire sur le peuplement. C<strong>et</strong>te méthode a d’autant plus de sens que les plac<strong>et</strong>tesreprésentent <strong>des</strong> zones de peuplement homogène.Dans notre cas, l’approche par transect nous a semblé peu pertinente, bien qu’elle ait donné<strong>des</strong> résultats concordant avec ceux obtenu par RockFor NET .3.1.2. RockFor NETC<strong>et</strong>te cartographie a été effectuée à partir <strong>des</strong> résultats d’ARP obtenus sur RockFor NET . Pourchaque transect, les ARP de chaque zone de départ ont été calculés mais n’a été r<strong>et</strong>enu que l’ARP leplus important pour chacun <strong>des</strong> transects (voir annexes). Pour le transect 1 (en jaune sur la carte),l’ARP est de 27 % (ARP de la plac<strong>et</strong>te 10), 78 % (plac<strong>et</strong>te 9), 72 % (plac<strong>et</strong>te 16) <strong>et</strong> 80 % (plac<strong>et</strong>te 7)respectivement pour les transects 2, 3 <strong>et</strong> 4. Les quatre derniers transects ont un ARP nul ou inférieurà 1 %. Les ARP nuls (transects 5, 7 <strong>et</strong> 8) sont <strong>du</strong>s soit à l’absence de zone de départ dans le transectconcerné soit à l’absence de blocs à l’aval de c<strong>et</strong>te zone de départ (plac<strong>et</strong>te11). L’ARP inférieur à 1 %peut s’expliquer par le fait que le bloc le plus important à l’aval de la zone concernée reste de tailleraisonnable (volume < 1 m 3 ) <strong>et</strong> que la pente est n<strong>et</strong>tement inférieure à celle <strong>des</strong> autres plac<strong>et</strong>tes(31 °).Figure 11: carte <strong>des</strong> ARP en aval de chaque transect (RFN)Les résultats obtenus semblent être proches de ceux de l’IMA. La partie nord-est de la forêt aun mauvais ARP (autour de 70-80 %) alors que la partie sud-ouest a le meilleur ARP possible :inférieur à 1 %. La forêt a donc, dans c<strong>et</strong>te dernière zone un rôle non négligeable qui suffit à protégerles enjeux se trouvant en contrebas. Il n’y a donc, normalement, pas besoin d’ouvrages de génie civildans c<strong>et</strong>te partie de la parcelle. En revanche, les résultats montrant <strong>des</strong> ARP forts dans la partienord-est confirment le bien fondé de la place <strong>du</strong> fil<strong>et</strong>, installé en juin-juill<strong>et</strong> 2010, qui protège lesmaisons <strong>et</strong> la route sur c<strong>et</strong>te partie de la forêt. C’est en eff<strong>et</strong> dans c<strong>et</strong>te partie de la forêt qu<strong>et</strong>ombent, en majorité, les plus gros blocs <strong>et</strong> qu’il y a la plus forte pente (plutôt autour de 50 ° que de40 °) ; la forêt ne suffit donc plus à la protection <strong>des</strong> habitations, <strong>des</strong> habitants ou <strong>des</strong> usagers de laroute18
Il faut garder en tête que les ARP calculés pour le nord-est de la parcelle sont <strong>des</strong> minima : ilpeut y avoir d’autres zones de départ dans la parcelle voisine par laquelle le transect passe. Il y a parexemple de gran<strong>des</strong> chances que l’ARP <strong>du</strong> transect le plus au nord soit de plus de 27 %.Si on voulait obtenir un ARP inférieur à 1% avec notre forêt, il faudrait soit augmenter de 4 à6 fois notre nombre de tiges pour un même diamètre (20-25 cm), soit augmenter les diamètres <strong>des</strong>tiges déjà présentes sur le terrain de 10 cm en moyenne. Ces solutions sont impossibles à m<strong>et</strong>tre enœuvre rapidement (dans les 10 ans à venir par exemple). On ne peut donc avoir un ARP nul pour latotalité de notre parcelle à court terme. En revanche, il est possible de travailler en faveur de cepeuplement pour ne plus avoir besoin d’investir dans un fil<strong>et</strong> tel qu’il a été installé c<strong>et</strong>te année à lafin de la <strong>du</strong>rée de vie de ce dernier. C<strong>et</strong>te sylviculture serait sans aucun doute moins onéreuse quel’installation d’un nouveau fil<strong>et</strong> dans les 30 ans à venir.3.1.3. RockyFor3DLorsqu’une simulation est complétée, Rockyfor3D pro<strong>du</strong>it toute une série de résultats, sousforme de rasters, de fichiers texte <strong>et</strong> de figures Matlab.Tout d’abord, pour chaque cellule <strong>du</strong> raster de départ, différentes variables sont enregistréesà chaque passage ou rebond d’un bloc simulé, perm<strong>et</strong>tant l’établissement de huit cartes rasters ensortie. Ces rasters présentent la même résolution <strong>et</strong> la même extension que les rasters d’entrée, <strong>et</strong>se répartissent comme suit. Deux rasters sur l’énergie cinétique par cellule (moyenne <strong>et</strong> dans le niveau de confiance de95 %), translationnelle <strong>et</strong> rotationnelle, en kilojoules (kJ) Deux rasters sur la hauteur de passage (moyenne <strong>et</strong> dans le niveau de confiance de 95 %),mesurées dans la direction normale par rapport à la surface de la pente, en mètre (m)Un raster sur le nombre de bloc ayant traversé chaque cellule Deux rasters sur les blocs stoppés dans chaque cellule, en nombre <strong>et</strong> en volume (en mètrescube, m 3 ) Un dernier raster contenant les angles moyens de ligne d’énergie par cellule, en degrés (°)Par ailleurs, un fichier journal au format texte est systématiquement créé, contenant lesinformations générales de la simulation <strong>et</strong> ses résultats : nombre de blocs simulés par cellule <strong>et</strong> autotal, hauteur additionnelle, présence de forêt ou non, volumes, énergies cinétiques <strong>et</strong> angles <strong>des</strong>lignes d’énergie simulés, heures de début <strong>et</strong> de fin de la simulation, liste <strong>des</strong> rasters de sortie. A cecis’ajoute une section de remarque à remplir par l’utilisateur.Enfin, il est possible d’établir <strong>des</strong> trajectoires de chutes de bloc en 2D suite à la simulation.Dans la fenêtre principale, il suffit de sélectionner un point de départ <strong>et</strong> un d’arrivée, le modèlecalcule ensuite un profil en long, qu’il délivre sous la forme d’un graphique Matlab <strong>et</strong> d’un fichiertexte dont un exemple est donné ci-<strong>des</strong>sous <strong>et</strong> regroupant les coordonnées le long de la trajectoireassorties <strong>des</strong> données d’altitude, de hauteur de passage <strong>et</strong> d’énergie cinétique.X Y Dist(m) Alt(m) Hmoy(m) H95(m) Emoy(kJ) E95(kJ)915531 2080650 0.00 557.30 0.60 0.60 274.00 409.00915521 2080660 14.14 549.65 0.40 0.50 144.00 268.00915521 2080670 24.14 548.99 0.50 0.60 135.00 360.0019
Cas de Grignon – analyse <strong>des</strong> résultats obtenus par Rockyfor3DA partir <strong>des</strong> dix rasters décrivant la parcelle <strong>et</strong> <strong>des</strong> cinq rasters décrivant le peuplementforestier, nous avons fait tourner plusieurs fois le modèle, avec à chaque fois 500 blocs lâchés parzone de départ précédemment établie <strong>et</strong> une hauteur de lâcher de cinq mètres de haut.Le nombre de passage de bloc par cellule dépend fortement <strong>du</strong> nombre de bloc lâchés àl’origine, rendant c<strong>et</strong>te donnée peu significative. Nous avons donc calculé la fréquence de passagepour chaque cellule, en divisant le nombre de blocs qui passent par la cellule (survol ou rebond) parle nombre de blocs lâchés au total (soit 60 500 pour nos simulations, soit 500 blocs pour 90 cellulessources). Ces fréquences sont ensuite regroupées au sein de quatre classes (dont les bornes sont0,000 1, 0,001, 0,01 <strong>et</strong> 0,1) à l’aide de l’outil Reclassify. On obtient alors les cartes suivantes.Cartes <strong>des</strong> fréquences de propagation de blocs, lors de simulation avec (figure de gauche) <strong>et</strong> sans forêt (figure de droite)On note une diminution <strong>des</strong> fréquences de propagation, <strong>et</strong> donc une bonne capacité <strong>du</strong>peuplement à jouer son rôle de protection vis-à-vis de l’aléa chute de pierre. Cependant, afind’obtenir <strong>des</strong> données plus parlantes, il a été décidé de réaliser un nouveau raster (à l’aide de l’outilRaster calculator), présentant les zones protégées par la forêt, c'est-à-dire les zones où la fréquencede propagation <strong>des</strong> blocs est plus faible avec forêt que sans forêt, <strong>et</strong> où c<strong>et</strong>te fréquence avec forêtest négligeable (inférieure à 10 -3 ). On obtient alors la carte suivante.Figure 12: cartographie <strong>des</strong> zones protégées par la forêt telles que définies ci-<strong>des</strong>sus20
On peut remarquer que la forêt perm<strong>et</strong> de diminuer les fréquences de propagation <strong>des</strong> blocs,mais que les fréquences ainsi diminuées peuvent rester élevées (supérieures à 10 -3 soit 0,1 %). Laforêt semble donc jouer un faible rôle de protection ; or, sur le terrain, nous avons pu constater laprésence de blocs arrêtés par la forêt en de nombreuses zones.Figure 13: volumes déposés par cellule - simulation avec forêtOn constate sur c<strong>et</strong>te carte que les plus gros volumes de blocs déposés se situent au nord <strong>et</strong>à l’est, ainsi qu’en bas de pente (ce qui est logique). Ceci est à corréler avec les valeurs d’IMA <strong>et</strong>d’ARP (issues de RFN) évoqués par ailleurs dans ce rapport.21
Une autre donnée de sortie de RF3D perm<strong>et</strong> l’analyse <strong>des</strong> profils de trajectoires. Ci-<strong>des</strong>sous,les deux points reliés en bleu ont servir à l’établissement <strong>du</strong> profil en long représenté par la figureMatlab qui suit.Figure 14: interface de RF3D <strong>et</strong> visualisation (en bleu) <strong>du</strong> traj<strong>et</strong> étudié ci-<strong>des</strong>sousFigure 15: résultats de la simulation le long <strong>du</strong> profil <strong>des</strong>siné entre les points 1 (x1, y1) <strong>et</strong> 2 (x2, y2)Ce graphique perm<strong>et</strong> de m<strong>et</strong>tre en évidence le profil de pente entre les deux points <strong>et</strong>, lelong de ce profil, les énergies cinétiques <strong>et</strong> les hauteurs de passage (moyenne <strong>et</strong> dans l’intervalle deconfiance de 95 %), développées aux différentes altitu<strong>des</strong>. Ceci perm<strong>et</strong> de comparer deux profils, <strong>et</strong>notamment par rapport aux transects d’étude de l’IMA <strong>et</strong> de l’ARP.22
3.2. Avantages <strong>et</strong> inconvénients <strong>des</strong> trois métho<strong>des</strong>3.2.1. IMAL’avantage majeur de l’utilisation de l’IMA pour caractériser un peuplement vis-à-vis de l’aléachute de blocs réside dans sa facilité <strong>et</strong> sa rapidité de mise en place. A partir <strong>des</strong> seules données dedensité <strong>et</strong> de surface terrière d’un peuplement <strong>et</strong> sans avoir à m<strong>et</strong>tre en œuvre de longuesmanipulations, on obtient un indice perm<strong>et</strong>tant de comparer <strong>des</strong> peuplements entre eux.En revanche, l’IMA est un outil beaucoup plus partiel que RockForN<strong>et</strong> <strong>et</strong> à fortioriRockyFor3D. Il n’intègre aucune donnée topologique (pente, rugosité), morphologique sur les blocs àl’origine de l’aléa (dimensions, forme), ou encore de données sur les essences présentes.Ainsi par exemple, un peuplement de résineux sur une pente forte avec un sol présentantune faible rugosité <strong>et</strong> soumis à la chute de gros blocs aura un IMA égal à celui d’un peuplement dehêtre en pente moyenne sur sol très rugueux <strong>et</strong> soumis à la chute de blocs moyens, pour peu que lesdeux peuplements aient <strong>des</strong> densités <strong>et</strong> surfaces terrières situées dans les mêmes intervalles pour ladétermination de l’IMA. Or on imagine bien que ces peuplements ont <strong>des</strong> capacités très différentes àmitiger l’aléa auquel ils sont soumis.Ainsi, à l’inverse <strong>des</strong> deux autres métho<strong>des</strong> qui offrent <strong>des</strong> opportunités de comparaisonsabsolues entre peuplements très hétérogènes, la comparaison d’IMA entre peuplements n’a de sensque s’il s’agit de peuplements situés sur <strong>des</strong> terrains semblables <strong>et</strong> soumis à <strong>des</strong> aléas équivalents entermes de fréquence <strong>et</strong> d’intensité. Or, on sait que dans la réalité, ces conditions ne sont en généralpas respectées, ce qui constitue un <strong>des</strong> inconvénients majeurs de la méthode qui fonctionne ainsisouvent sur <strong>des</strong> suppositions non vérifiées.En revanche, si on est dans le cas évoqué ci-<strong>des</strong>sus, l’IMA perm<strong>et</strong> de hiérarchiser <strong>des</strong> souspeuplementsvis à vis d’un aléa, <strong>et</strong> constitue ainsi un bon outil d’aide à la décision dans ladétermination de zones prioritaires d’intervention pour augmenter la qualité générale <strong>du</strong>peuplement pour lutter contre l’aléa.3.2.2. RockFor NETRFN est un outil simple <strong>et</strong> rapide d’utilisation. Les données sont nombreuses maisrelativement simples à relever sur le terrain (N, Dm, G, % essences). Une fois RFN lancé, on obtientl’ARP, <strong>des</strong> données générales sur le peuplement idéal le plus proche de celui présent sur le terrain <strong>et</strong>une énergie cinétique qui perm<strong>et</strong> de connaitre rapidement les classes d’ouvrages de génie civil àm<strong>et</strong>tre en place si besoin est. Il n’y a donc besoin que de très peu de temps d’analyse : soit l’ARP estbon, soit il ne l’est pas <strong>et</strong> dans ce cas, grâce au peuplement idéal, on peut savoir rapidement s’il estpossible d’obtenir un bon ARP dans les délais fixés (ce qui dépend <strong>des</strong> enjeux) en jouant sur lasylviculture <strong>du</strong> peuplement ou s’il est préférable de m<strong>et</strong>tre <strong>des</strong> ouvrages de génie civil au moins dansun premier temps <strong>et</strong> lesquels.Ce modèle est adapté pour perm<strong>et</strong>tre son utilisation par tout un chacun, ce qui incluedifférentes simplifications : un seul départ considéré, ce qui rend difficile la prise en compte <strong>des</strong>départs multiples dans un même peuplement, une seule taille de bloc, pas de données continuesmais <strong>des</strong> classes, ce qui rend le tout quelque peu imprécis. C’est donc un modèle qui a l’avantage23
d’être peu cher mais qui demande nombre important de données, proche de RF3D, pour uneprécision bien moindre.3.2.3. RockyFor3DLe modèle Rockyfor3D constitue un outil précieux dans le domaine de l’étude <strong>des</strong> chutes deblocs <strong>et</strong> <strong>du</strong> rôle de la forêt pour la protection contre c<strong>et</strong> aléa.Ainsi, il perm<strong>et</strong> une connaissance précise de l’aléa chute de blocs, dans <strong>des</strong> simulations avec<strong>et</strong> sans forêt, en évaluant le nombre <strong>et</strong> le volume <strong>des</strong> blocs qui arrivent dans chaque cellule de lazone étudiée. Ceci perm<strong>et</strong> d’évaluer les risques de la zone en croisant c<strong>et</strong>te connaissance de l’aléaavec celle <strong>des</strong> enjeux en présence (dans notre cas, quelques habitations, une route <strong>et</strong> un hangar). Deplus, le modèle donne en sortie l’énergie cinétique développée par les blocs pour chaque cellule ; lesouvrages de génie civil à implanter sur la zone pourront ainsi être mieux dimensionnés pourcorrespondre aux besoins réels de la zone <strong>et</strong> perm<strong>et</strong>tre d’éventuelles économies, notamment enprenant en compte la présence de forêt dans le modèle, perm<strong>et</strong>tant par exemple de choisir un fil<strong>et</strong>de protection de classe inférieure.Enfin, le format de sortie <strong>des</strong> données (huit rasters en ASCII) perm<strong>et</strong> la réalisation immédiated’une cartographie <strong>des</strong> zones soumises à l’aléa chute de pierre, ce qui offre la possibilité d’uneprésentation visuelle auprès de décideurs <strong>et</strong> notamment <strong>des</strong> élus, avec plus de poids qu’un simplerapport écrit. La cartographie peut également servir de support pour la réalisation d’étu<strong>des</strong>ultérieures, notamment dans le cadre de la réalisation de plans de prévention <strong>des</strong> risques naturels.Cependant, il faut noter que c<strong>et</strong> outil présente également <strong>des</strong> inconvénients. Il nécessitenotamment <strong>des</strong> données précises au format raster, dont les résolutions sont idéalement comprisesentre 1 m x 1 m <strong>et</strong> 10 m x 10 m, ce qui implique de façon générale la possession d’un logiciel <strong>des</strong>ystème d’information géographique, logiciels onéreux, ainsi que la maîtrise d’un tel logiciel, <strong>et</strong> doncune formation adaptée.De plus, les données d’entrée se doivent d’être complètes <strong>et</strong> précises, nécessitant un travailde terrain important, <strong>et</strong> portant sur <strong>des</strong> notions parfois complexes. Par exemple, l’élasticité de lapente <strong>et</strong> sa capacité à faire rebondir le bloc est évalué à l’aide de la rugosité <strong>du</strong> sol, donnée trèssubjective <strong>et</strong> assez difficile à mesurer. Par ailleurs, une telle précision <strong>et</strong> la nécessité de travailler àpartir de rasters con<strong>du</strong>it à un temps d’analyse <strong>des</strong> données brutes pour leur saisie dans le logicielassez long <strong>et</strong> donc couteux.Enfin, il faut noter qu’il n’est pas possible ni cohérent de comparer deux simulations sur lamême zone au niveau <strong>des</strong> énergies cinétiques développées <strong>et</strong> <strong>des</strong> volumes de bloc déposés. En eff<strong>et</strong>,le modèle applique un coefficient faisant varier les dimensions <strong>du</strong> bloc pour chaque bloc, coefficienttiré aléatoirement entre 0 <strong>et</strong> 10 %. De même, le peuplement décrit par les quatre couches rastersprécédemment évoquées (N, d 1,30 , d1,30 <strong>et</strong> type de peuplement) est varié à chaque simulation selonun nombre tiré aléatoirement, tout comme l’élasticité <strong>du</strong> sol (à partir <strong>des</strong> MOH 70, 20, 10 <strong>et</strong> <strong>du</strong> typede sol). Il n’est donc pas possible d’obtenir exactement les mêmes blocs se déplaçant de manièresimilaire dans un peuplement <strong>et</strong> rebondissant sur un sol de rugosité <strong>et</strong> d’élasticité constantes.24
3.3. Coût <strong>et</strong> efficacité <strong>des</strong> trois métho<strong>des</strong>3.3.1. Analyse <strong>des</strong> coûts <strong>des</strong> différentes métho<strong>des</strong>Le but est de déterminer un coût, le plus exhaustif possible, pour chacune <strong>des</strong> trois métho<strong>des</strong>sur la parcelle totale, de 6 ha environ.Nous avons choisi de séparer les coûts selon les différentes phases de mise en place dechacune <strong>des</strong> métho<strong>des</strong> : phase de préparation <strong>du</strong> terrain, phase de terrain, phase d’acquisition <strong>des</strong>données <strong>et</strong> phase de simulation <strong>et</strong> d’analyse <strong>des</strong> résultats.Nous avons calculé ces coûts en nombre d’heures nécessaires à la mise en place de chaqueétape (nombre Hommes/jour * 8 heures par jour) d’une part, <strong>et</strong> en euro d’autre part. Le coût eneuro est obtenu en multipliant le nombre d’heures par étape par les coûts horaires de la maind’œuvre qualifiée pour réaliser c<strong>et</strong>te étape.Les temps par étapes ont été estimés grâce à notre expérience <strong>du</strong> terrain d’une part, <strong>et</strong> grâceaux données obtenues par entr<strong>et</strong>ien auprès <strong>des</strong> acteurs réalisant couramment <strong>des</strong> opérationssimilaires. Nous avons tenté d’estimer ces coûts en considérant un opérateur habitué à réaliser lespratiques nécessaires à chacune <strong>des</strong> étapes.Pour chaque étape, nous avons renseigné la catégorie socioprofessionnelle de la personneréalisant c<strong>et</strong>te étape, ainsi que le coût horaire de la main d’œuvre pour c<strong>et</strong>te catégorie.Phase de préparation <strong>du</strong> terrain :C<strong>et</strong>te phase est commune à toutes les métho<strong>des</strong>. Elle correspond à toutes lesmanipulations qu’il est nécessaire de réitérer avant chaque sortie terrain : détermination <strong>du</strong> maillagede la parcelle (ou <strong>des</strong> plac<strong>et</strong>tes par répartition aléatoire simple), configuration <strong>des</strong> GPS (si on lesutilise) <strong>et</strong> impression <strong>des</strong> cartes <strong>des</strong> plac<strong>et</strong>tes, cartes contenant, dans notre cas, les coordonnées <strong>et</strong>les altitu<strong>des</strong> <strong>des</strong> plac<strong>et</strong>tes. Nous n’avons pas compté le temps d’élaboration <strong>des</strong> fiches de terrain, carelles ne sont préparées qu’une seule fois.Phase de terrain :Les relevés de terrain ne nécessitent pas le même temps selon la méthode considérée, <strong>et</strong>selon le type de plac<strong>et</strong>te mise en place.Nous avons considéré :- Un inventaire PCQM pour RF3D. Il s’agit de celui que nous avons mis en place sur le terrain.Pour les 26 plac<strong>et</strong>tes, nous avons considéré que l’inventaire total (peuplement + sol + blocs +déplacement) nécessitait 2 hommes/jour, soit l’équivalent de 16 heures de travail. Le tempstotal nécessaire par plac<strong>et</strong>te est de 10 minutes à 2 personnes, soit 20 minutes par plac<strong>et</strong>te,dont 14 minutes pour obtenir les données <strong>du</strong> peuplement par PCQM, <strong>et</strong> 6 minutes pour lereste <strong>des</strong> relevés.- Un inventaire en surface fixe pour RF3D. Le temps nécessaire a été estimé grâce auxentr<strong>et</strong>iens réalisés auprès de Fréderic BERGER, docteur chargé de recherche au CEMAGREF<strong>et</strong> Nicolas CLOUET, ingénieur d’étude au CEMAGREF de Grenoble, l’un comme l’autre étant25
habitués à réaliser ce genre de relevé. Compte tenu de la pente <strong>et</strong> <strong>des</strong> données à relever, untemps de 30 min a été r<strong>et</strong>enu (15 min à 2). C’est 10 min de plus par plac<strong>et</strong>te que pour laméthode PCQM, soit environ 4,3 heures de plus pour l’ensemble <strong>des</strong> 26 plac<strong>et</strong>tes. 20,3heures ont donc été considérées nécessaires pour réaliser ce type d’inventaire sur notreparcelle.- Un inventaire complémentaire aux données obtenues grâce à l’étude <strong>du</strong> LIDAR, pour RF3D.C<strong>et</strong> inventaire n’intègre aucune donnée de peuplement, <strong>et</strong> ne nécessite donc que 3 min parplac<strong>et</strong>te à 2 personnes (6 au total). C’est 14 min de moins que par la méthode PCQM, soit 6heures de moins pour la parcelle totale. 10 heures sont donc nécessaires pour c<strong>et</strong> inventairesur la parcelle totale.- Un inventaire PCQM pour RFN, qui nécessite approximativement le même temps quel’inventaire PCQM pour RF3D. En eff<strong>et</strong>, l’inventaire dans le cas de RF3D nécessite en plusd’estimer la rugosité <strong>et</strong> le type de sol, mais RFN nécessite de mesurer la pente <strong>et</strong> de releverl’altitude ; on peut donc considérer que ces deux dernières métho<strong>des</strong> d’évaluationnécessitent un temps égal de relevé par plac<strong>et</strong>te. 16 heures sont donc nécessaires pour c<strong>et</strong>inventaire sur la parcelle.- Un inventaire en surface fixe pour RFN, nécessitant 20,3 heures pour l’ensemble de laparcelle, tout comme l’inventaire équivalent pour RF3D.- Un inventaire pour la méthode IMA : il s’agit d’un inventaire visant à estimer uniquement ladensité <strong>et</strong> la surface terrière. On réalise alors un tour d’horizon au relascope pour estimer lasurface terrière <strong>et</strong> une mesure au télémètre perm<strong>et</strong> de connaitre la distance de l’arbre leplus proche par quart (méthode PCQM), afin d’en dé<strong>du</strong>ire la densité sur la plac<strong>et</strong>te. Nousavons estimé le temps nécessaire à 4 minutes par plac<strong>et</strong>te au total, 16 minutes de moins quepour un inventaire compl<strong>et</strong> par la méthode PCQM, soit 7 heures de moins pour l’ensemblede la parcelle. 9 heures sont donc nécessaires pour réaliser ce type d’inventaire surl’ensemble de la parcelle.on a :Nb : Sur les 16 heures nécessaire à la réalisation <strong>des</strong> relevés <strong>des</strong> 26 plac<strong>et</strong>tes (RF3D-PCQM),- 20*16 = 520 minutes = 8,7 heures (8h42min) passées à réaliser les mesures- 16 – 8,7 = 7, 3 heures (7h18min) de déplacement entre les plac<strong>et</strong>tesLe temps passé à circuler entre les plac<strong>et</strong>tes représente donc 45,5% <strong>du</strong> temps total.Phase d’acquisition <strong>des</strong> données :C<strong>et</strong>te phase correspond à l’acquisition <strong>et</strong> au traitement <strong>des</strong> données obtenues sur le terrain.Pour les trois métho<strong>des</strong>, cela correspond à rentrer ces données dans un classeur Excel préalablementréalisé, qui calcule les données secondaires nécessaires aux modèles : densité à partir <strong>des</strong> distances,diamètre moyen par plac<strong>et</strong>te, surface terrière à partir de la densité <strong>et</strong> <strong>du</strong> diamètre moyen. Poursimplifier, nous avons considéré que ce temps était équivalent pour toutes les métho<strong>des</strong>; nousl’avons estimé à une heure.Là encore, on estime que ce tableur Excel est fait une fois pour toute, <strong>et</strong> que son temps decréation n’est donc pas à considérer dans nos calcul de coûts.Pour RF3D, c<strong>et</strong>te phase inclue également la création <strong>des</strong> couches rasters nécessaires aumodèle. 10 couches sont nécessaires à la simulation sans forêt, 15 si il y a présence de forêt. Lacréation de ces rasters nécessite à nos yeux 4 heures de travail.26
Enfin, dans le cas où l’on possède le LIDAR de la zone d’intérêt, il faut indivi<strong>du</strong>aliser <strong>des</strong> zonesde peuplement homogène extractibles par ce LIDAR, puis affiner ces polygones homogènes sur l<strong>et</strong>errain. Un entr<strong>et</strong>ien avec Nicolas CLOUET nous a appris qu’une journée de travail était nécessairepour réaliser c<strong>et</strong>te manipulation, soit 8 heures de travail.Phase de simulation <strong>et</strong> d’analyses <strong>des</strong> résultats :C<strong>et</strong>te phase est très rapide pour l’indice IMA : l’indice par plac<strong>et</strong>te <strong>et</strong> par transect estdirectement calculé par un tableur Excel adapté. Il ne reste plus alors qu’à cartographier les résultatssous SIG si on le souhaite, <strong>et</strong> à comparer les valeurs d’IMA entre elles. Nous avons estimé qu’unedemi-heure était suffisante pour réaliser c<strong>et</strong>te analyse.Pour RFN, la simulation passe par la séparation de la parcelle en transects, la localisation <strong>des</strong>zones de départ <strong>et</strong> le calcul <strong>des</strong> ARP pour chaque zone de départ. L’analyse consiste à garder partransect l’ARP le plus important, <strong>et</strong> à comparer ces ARP pour déterminer les zones en bas de penteles plus soumises à l’aléa. Ce travail nécessite à nos yeux 1h30 minimum de travail, soit 1,5 h dansnotre tableau.Pour RF3D, le temps d’analyse de toutes les couches rasters en sortie <strong>du</strong> modèle <strong>et</strong> lacréation <strong>des</strong> couches de comparaison <strong>des</strong> résultats avec <strong>et</strong> sans forêt demande un travailconsidérable, une journée environ (8 heures) dans notre cas.L’ensemble de ces données de coûts ont été résumées dans le tableau ci-<strong>des</strong>sous :Base Etape ModèlePréparation<strong>du</strong> terrainPhase de terrainAquisition<strong>des</strong> donnéesSimulation<strong>et</strong> analys<strong>et</strong>emps(heure)CSPCoût horaire Coût de l'étapeCréation <strong>du</strong> maillage de la parcelle Tous 0.5 Ingenieur 87.5 43.75Préparation <strong>des</strong> GPS Tous 0.5 Technicien 56.25 28.125Impression <strong>des</strong> cartes Tous 0.25 Technicien 56.25 14.0625IMA IMA 9 Technicien_ op 47.5 427.5RFN - PCQM RFN 16 Technicien_ op 47.5 760RFN - Surface fixe RFN 20.3 Technicien_ op 47.5 964.25RF3D - PCQM RF3D 16 Technicien_ op 47.5 760RF3D - Surface fixe RF3D 20.3 Technicien_ op 47.5 964.25RF3D - LIDAR RF3D 10 Technicien_ op 47.5 475Création de tableur exel Tous 0 Technicien 56.25 0Acquisition <strong>des</strong> données Tous 1 Technicien 56.25 56.25Acquisition <strong>des</strong> données LIDAR RF3D 8 Ingenieur 87.5 700Création <strong>des</strong> rasters RF3D 4 Technicien 56.25 225IMA IMA 0.5 Ingenieur 87.5 43.75RFN pour la parcelle totale RFN 1.5 Ingenieur 87.5 131.25RF3D pour la parcelle totale RF3D 8 Ingenieur 87.5 700Dans le tableau suivant, nous avons sommé les coûts de chaque étape pour chacune <strong>des</strong>métho<strong>des</strong> : la colonne « coût total (€) » perm<strong>et</strong> ainsi de comparer les coûts finaux de chacune <strong>des</strong>métho<strong>des</strong> ; la colonne « coût total (heure) » perm<strong>et</strong> une comparaison <strong>du</strong> temps nécessaire à la miseen place de chaque méthode. La colonne colorée en vert correspond au rapport entre le coût de laméthode considérée <strong>et</strong> le coût de la méthode RFN/PCQM prise comme référence. Ce choix deréférence est dû au fait que c<strong>et</strong>te méthode est intermédiaire en terme de coût, <strong>et</strong> l’est aussi, à priori,en terme de précision de l’information : une telle référence facilite la comparaison avec lesmétho<strong>des</strong> plus onéreuses comme avec les moins onéreuses.27
Surface = 6 haPréparation<strong>du</strong> terrainPhasede terrainAcquisition<strong>des</strong> donnéesSimulation<strong>et</strong> analyseCoût total(€)(Coût) /(Coût IMA)Coût total(heures)Coût IMA 85,94 427,50 56,25 43,75 613,44 0,59 11,75Coût RFN/Surface fixe 85,94 964,25 56,25 131,25 1237,69 1,20 24,05Cout RFN/PCQM 85,94 760,00 56,25 131,25 1033,44 1,00 19,75Coût RF3D/Surface fixe 85,94 964,25 281,25 700,00 2031,44 1,97 50,55Coût RF3D/PCQM 85,94 760,00 281,25 700,00 1827,19 1,77 30,25Coût RF3D/LIDAR 85,94 475,00 981,25 700,00 2242,19 2,17 32,253.3.2. Coûts fixes / Coûts variablesIl est important de noter que parmi les coûts recensés ci-<strong>des</strong>sus, certains sont fixes <strong>et</strong> nedépendent pas de la surface de la parcelle, alors que d’autres augmentent ou diminuent avec lasurface de la parcelle.Les coûts relatifs à la phase de terrain sont fixes, à l’inverse <strong>des</strong> coûts de relevé terrain, <strong>des</strong>coûts d’acquisition <strong>des</strong> données sous Excel <strong>et</strong> <strong>des</strong> coûts de simulation <strong>et</strong> d’analyse par les métho<strong>des</strong>IMA <strong>et</strong> RFN qui sont, eux, proportionnels à la surface.Dans le cas de la simulation par RF3D, les coûts évoluent comme suit :- les coûts de création <strong>des</strong> rasters sont fixes : quelle que soit la taille de la parcelle <strong>et</strong> lenombre de plac<strong>et</strong>tes, le temps de création <strong>des</strong> rasters est le même.- le coût d’acquisition <strong>des</strong> données <strong>du</strong> peuplement à partir <strong>des</strong> données LIDAR est variable.Cela dit, pour de très p<strong>et</strong>ites surfaces, ce coût n’est plus proportionnellement variable : lavalidation sur le terrain <strong>des</strong> polygones homogènes entraine un temps irré<strong>du</strong>ctible demanipulation dû au déplacement. Nous avons estimé que, quelle que soit la surface, c<strong>et</strong>teétape ne peut pas être réalisée en moins d’une demi-journée, soit 4 heures de travail. Enrevanche, au-delà de quelques hectares, ce coût devient proportionnellement variable à lasurface.- les coûts de simulation <strong>et</strong> d’analyse sont fixes : le nombre de couches rasters à analyser est lemême quelle que soit la surface.Pour vérifier l’influence de la variation de surface sur les coûts <strong>des</strong> métho<strong>des</strong>, nous avonsestimé ces derniers pour une parcelle fictive de 1 ha (1/6 de notre surface). Ci-<strong>des</strong>sous le tableau quiréunit les coûts pour c<strong>et</strong>te parcelle fictive :Surface = 1 haPréparation<strong>du</strong> terrainPhasede terrainAcquisition<strong>des</strong> donnéesSimulation<strong>et</strong> analyseCoût total(€)(Coût) /(Coût IMA)Coût total(heures)Coût IMA 85,94 71,25 9,38 7,29 173,85 0,71 3,00Coût RFN/Surface fixe 85,94 160,71 9,38 21,88 277,90 1,14 5,05Coût RFN/PCQM 85,94 126,67 9,38 21,88 243,85 1,00 4,33Coût RF3D/Surface fixe 85,94 160,71 234,38 700,00 1181,02 4,84 16,80Coût RF3D/PCQM 85,94 126,67 234,38 700,00 1146,98 4,70 16,08Coût RF3D/LIDAR 85,94 79,17 584,38 700,00 1449,48 5,94 19,0828
La majorité <strong>des</strong> coûts fixes se rapportent à la méthode RF3D. Il est donc normal de constaterque c<strong>et</strong>te méthode est proportionnellement plus chère que les autres métho<strong>des</strong> quand la surfacediminue. C’est en revanche l’inverse qui se pro<strong>du</strong>it si la surface augmente.Un aperçu de ce résultat est donné par le tableau suivant :Méthode(Coût) / (Coût RFN)Surface de 1ha(Coût) / (Coût RFN)Surface de 6ha(Coût) / (Coût RFN)Surface de 12haCoût IMA 0,71 0,59 0,58Coût RFN/Surface fixe 1,14 1,20 1,21Cout RFN/PCQM 1,00 1,00 1,00Coût RF3D/Surface fixe 4,84 1,97 1,54Coût RF3D/PCQM 4,70 1,77 1,33Coût RF3D/LIDAR 5,94 2,17 1,75On voit effectivement ici que plus la surface augmente, plus le surcoût de RF3D par rapportaux autres métho<strong>des</strong> diminue, proportionnellement au coût total. L’évolution <strong>du</strong> rapport (coûtIMA) / (coût RFN) est, par contre, faible car ces métho<strong>des</strong> incluent majoritairement <strong>des</strong> coûtsvariables.3.3.3. Comparaison <strong>des</strong> métho<strong>des</strong>Comparaison IMA/RFNComme nous l’avons vu précédemment, l’IMA est un indice basique perm<strong>et</strong>tant uniquementde comparer entre eux <strong>des</strong> peuplements qui ne diffèrent que par leur densité <strong>et</strong> leur surface terrière.Il ne renvoie aucune donnée absolue, mais seulement une valeur de comparaison entrepeuplements.A l’inverse, RFN renvoie un aléa rési<strong>du</strong>el probable (ARP) qui correspond à la probabilité qu’unbloc qui se détache atteigne le bas d’un transect. Ces ARP dépendent à la fois de la topographie, <strong>des</strong>essences, de la densité, de la surface terrière <strong>et</strong> de la taille <strong>des</strong> blocs. On peut donc, sans problème,comparer les ARP en aval de deux transects pourtant très différents.Connaissant la pro<strong>du</strong>ctivité de la zone de départ à l’origine de l’aléa, RFN perm<strong>et</strong> d’estimer,en multipliant c<strong>et</strong>te pro<strong>du</strong>ctivité par l’ARP obtenu, la quantité de blocs arrivant en bas <strong>du</strong> transectsur une période donnée, <strong>et</strong> donc l’évolution de c<strong>et</strong>te quantité si le peuplement évolue. L’indice demaitrise de l’aléa ne perm<strong>et</strong>, en aucun cas, d’obtenir de tels résultats.Sur les surfaces étudiées, la détermination de l’IMA coûte, selon nos estimations, entre 58%<strong>et</strong> 71% <strong>du</strong> prix de mise en place de RFN par plac<strong>et</strong>tes PCQM.Compte tenu de ce faible surcoût <strong>et</strong> <strong>des</strong> avantages considérables de la simulation RFN parrapport à l’utilisation de l’IMA, l’utilisation de ce dernier indice nous semble peu pertinente.Cependant, elle peut constituer une information supplémentaire intéressante, en plus de lasimulation avec RFN, dans le cas très particulier où les peuplements à comparer seraient équivalentsen terme de répartition <strong>des</strong> essences <strong>et</strong> situés sur <strong>des</strong> terrains comparables : l’IMA perm<strong>et</strong>trait alors29
d’obtenir rapidement une idée <strong>des</strong> zones d’interventions sylvicoles prioritaires dans le butd’améliorer la qualité générale <strong>du</strong> peuplement.Utilisation de RF3DComme nous l’avons vu dans l’analyse <strong>des</strong> résultats de RF3D obtenus sur le site de Grignon,RF3D a pu pro<strong>du</strong>ire <strong>des</strong> résultats étonnants <strong>et</strong> peu cohérents avec les réalités de terrain d’une part <strong>et</strong>les résultats <strong>des</strong> métho<strong>des</strong> IMA <strong>et</strong> RFN d’autre part. On peut donc se demander quelle est l’originede ces erreurs, <strong>et</strong> une hypothèse vient <strong>du</strong> modèle lui-même. En eff<strong>et</strong>, RF3D nécessite <strong>des</strong> donnéesd’une grande précision (idéalement au pas de un mètre). Or, le MNT à notre disposition était àl’origine au pas de vingt mètres, <strong>et</strong> après correction au pas de dix mètres ; les données relevées sur l<strong>et</strong>errain l’ont été au pas de vingt-cinq mètres (un relevé tous les 50 mètres), puis dégradées au pas dedix mètres. Il y a donc eu perte d’information, <strong>et</strong> on peut s’interroger sur la qualité <strong>des</strong> rasters au pasde 10 mètres à partir de données de précision moindre.Cependant, les résultats obtenus restent de bonne qualité dans leur ensemble, <strong>et</strong> l’on peuts’attendre à voir s’améliorer c<strong>et</strong>te qualité avec <strong>des</strong> données plus précises, issues notamment <strong>du</strong>LIDAR (MNT <strong>et</strong> MNS). Par exemple, la connaissance <strong>des</strong> volumes déposés dans chaque cellule peutperm<strong>et</strong>tre d’évaluer l’entr<strong>et</strong>ien <strong>des</strong> ouvrages (<strong>et</strong> notamment leur curage), <strong>et</strong>, par croisement avec lacarte <strong>des</strong> enjeux (bâti, réseaux, routes), d’évaluer les risques. Par ailleurs, l’incorporation <strong>du</strong>peuplement forestier dans le modèle perm<strong>et</strong> de prendre en compte son rôle de protection, ainsi quel’influence de la gestion sur l’évolution de c<strong>et</strong>te fonction de protection, en détaillant pixel par pixelles caractéristiques de peuplement <strong>et</strong> les différent résultats. En cela, ce modèle est plus intéressantque les outils IMA <strong>et</strong> RFN, qui eux se contentent de donner <strong>des</strong> valeurs par plac<strong>et</strong>tes (donc dansnotre cas sur 625m²), par transect ou par zone de départ.Il sera donc pertinent <strong>et</strong> intéressant d’utiliser le modèle Rockyfor3D pour <strong>des</strong> donnéesprécises, <strong>et</strong> notamment en cas de possession de résultats issu <strong>du</strong> LIDAR. En eff<strong>et</strong>, le MNT sera au pasde 1 mètre, soit la résolution idéale pour le modèle ; les données peuplement seront égalementsuffisamment précises. En ce qui concerne les données de sol <strong>et</strong> de blocs (type de sol, rugosités,dimensions <strong>et</strong> densité <strong>des</strong> blocs).Il faut également noter que l’utilisation <strong>du</strong> modèle n’est pas gratuite ; en eff<strong>et</strong>, développé parun chercheur <strong>du</strong> Cemagref qui a ensuite créé une association appelée EcorisQ (également à l’originede RFN), le modèle est soumis au paiement d’un abonnement. Celui-ci s’élève à 79 € par an pour lesparticuliers <strong>et</strong> 165 € par an pour les sociétés. Cependant, nous n’avons pas pris en compte ce coûtdans nos calculs, car nous avons estimé qu’il serait amorti sur plusieurs calculs au cours de l’année <strong>et</strong>donc peu pertinent sur une parcelle seule.Enfin, comme nous l’avons vu précédemment, il convient de préciser que la simulation par RF3D<strong>et</strong> la méthode bénéficiant le plus <strong>des</strong> économies d’échelle <strong>du</strong> fait de sa forte proportion de taches àcoûts fixes : ainsi, plus la surface d’étude est importante, moins il est cher d’utiliser RF3D par rapportaux autres métho<strong>des</strong>.30
4. Efficacité de la forêt contre les chutes de pierre4.1. Enjeux concernésLes enjeux concernés par le problème <strong>des</strong> chutes de blocs dans notre parcelle sont de plusieurstypes :- 1 hangar en service : vente de 4*4 avec 2 personnes travaillant la journée dans ce garage.- 1 grange <strong>et</strong> <strong>des</strong> garages- Habitations : 5 maisons dont 4 habitées en ce moment. Ce sont de grosses maisons familiales mais ilne reste souvent qu’un couple dans chaque maison, les enfants étant partis. C<strong>et</strong>te situation est doncappelée à changer.- Population habitant dans la zone de chute de pierre : 10 personnes habitant actuellement à pleintemps dans les maisons situées en contrebas de notre parcelle. Il est toutefois bon de spécifier qu<strong>et</strong>outes les maisons ne sont pas habitées c<strong>et</strong>te année <strong>et</strong> celles qui le sont, sont <strong>des</strong> grosses maisons oùseuls les parents habitent une fois les enfants partis. C<strong>et</strong>te population est donc appelée à augmenterdans les années à venir ainsi que l’enjeu qui en découle. Par exemple, il y a d’habitude 6 à 8personnes dans les trois appartements constituant la maison inhabitée c<strong>et</strong>te année. On utiliseradonc, pour les calculs, une population totale de 28 personnes pour maximiser les enjeux (c’est lapopulation qu’atteindraient, à court terme, ces 5 maisons selon les estimations de la mairie). Onajoutera 2 personnes travaillant dans la vente de voitures dans le hangar qui est au nord de notreparcelle. Soit une population de 30 personnes sur notre zone à risque.- Route départementale 925 de 1 ère catégorie classée à grande circulation avec une moyenne de 4 000-4 500 passages journaliers entre 2000 <strong>et</strong> 2005. C<strong>et</strong>te fréquentation continue d’augmenter chaqueannée. On comptabilise une dizaine de bus passant sur c<strong>et</strong>te route par jour.4.2. Coûts de substitutionC<strong>et</strong>te méthode perm<strong>et</strong> d’estimer la valeur <strong>du</strong> rôle de protection de la forêt par rapport à lavaleur d’un ouvrage de génie civil offrant une protection équivalente.On commence par déterminer l’ouvrage de génie civil adapté au site <strong>et</strong> aux enjeux (type <strong>et</strong>dimensions). On connait ainsi son prix d’achat <strong>et</strong> d’entr<strong>et</strong>ien, ceux-ci pouvant être comparés au prixd’entr<strong>et</strong>ien de la forêt jouant un rôle de protection.Le coût de substitution peut donc être déterminé comme suit :(coût implantation + coût entr<strong>et</strong>ien) génie civil sans prise en compte de la forêt-(coût implantation + coût entr<strong>et</strong>ien) génie civil avec prise en compte de la forêt-(coût implantation + coût entr<strong>et</strong>ien) scénario de gestion sylvicole31
Coûts d’implantation de l’ouvrage (cas sans forêt) :Dans c<strong>et</strong>te forêt, la démarche est quelque peu facilitée puisque l’étude a déjà été effectuéeen 2005 <strong>et</strong> que l’ouvrage a déjà été installé (juin-juill<strong>et</strong> 2010). Nous avons donc le détail <strong>des</strong> coûts<strong>des</strong> opérations. L’étude a bien été effectuée terrain nu donc sans prendre en compte la forêt. Ellepréconise l’utilisation d’un fil<strong>et</strong> pare-bloc de classe 6. Seulement, ce fil<strong>et</strong> a été installé sur 240ml. Ilfaudrait donc recalculer ce coût pour la parcelle de forêt que nous étudions soit 214ml.N° prix DésignationU.M. QuantitéCoûts d’implantation de l’ouvrage (cas avec forêt)Prix Unitaire enchiffre (HT)Montant HTNature 01 Installation de chantier010 Installation <strong>du</strong> chantierF 1.000 1590.00 1590.00020 Préparation <strong>du</strong> terrainF 1.000 3375.00 3375.00030 Signalisation <strong>du</strong> chantierF 1.000 100.00 100.00040 Conception PAQ, PPSPS <strong>et</strong> SOGEDF 1.000 150.00 150.00050 Note de calcul écran classe 6F 1.000 100.00 100.00055 Repli <strong>du</strong> chantierF 1.000 600.00 600.00Montant HT nature 01 Installation de chantierTVA (19.6%)Montant TTC5915.001159.347074.34Nature 02 Travaux060 Ecran dynamique pare-blocs de classe 6 + doublage grillage M 240.000 344.00 82560.00Montant HT nature 02 TravauxTVA (19.6%)Montant TTC82560.0116181.7698741.76Nature 03 Contrôles070 Installation <strong>du</strong> chantierF 1.000 518.00 518.01080 Préparation <strong>du</strong> terrainU 3.000 577.00 1731.00090 Signalisation <strong>du</strong> chantierU 3.000 193.00 579.00100 Conception PAQ, PPSPS <strong>et</strong> SOGEDF 1.000 150.00 150.00Montant HT nature 03 ContrôlesTVA (19.6%)Montant TTC2978.00583.693561.69Dossier Montant HT 91453.00TVA (19.6%) 17924.79Montant TTC 109377.79D’après le tableau ci-<strong>des</strong>sus, installer <strong>des</strong> ouvrages de génie civil adaptés au site de Grignonterrain nu reviendrait à dépenser 98 680,77 €. Un ouvrage de ce type a une <strong>du</strong>rée de vie de 30 anss’il n’est pas sollicité.La présence de la forêt <strong>et</strong> son rôle de protection pourrait perm<strong>et</strong>tre :• Une annulation de la pose de certains fil<strong>et</strong>s dans le cas où la forêt bloquerait certainscouloirs de passage de blocs. Dans le cas de la forêt de Grignon, la simulation RockyFor3D n’a montréaucune baisse <strong>du</strong> risque sur les enjeux qui soit suffisamment conséquente pour éviter la pose decertains ouvrages de génie civil.• un gain par rapport au coût d’implantation sans forêt dans le cas d’un sousdimensionnement<strong>du</strong> fil<strong>et</strong> (baisse de la catégorie <strong>du</strong> fil<strong>et</strong>). Pour la forêt de Grignon, les résultats de lasimulation RF3D ne montrent pas de baisse significative de l’énergie maximale libérée par les blocs auniveau <strong>du</strong> fil<strong>et</strong> (4 300 – 3 200 kJ). En revanche la baisse de la période de r<strong>et</strong>our est plus importante (6 –30 ans) mais ceci ne perm<strong>et</strong> pas de baisser le dimensionnement <strong>du</strong> fil<strong>et</strong> préconisé par la simulationsans forêt. Notons que les résultats de notre simulation RF3D montrent <strong>des</strong> arrivées de blocsdéveloppant une énergie qui correspond à un fil<strong>et</strong> de classe 8 (5 000 kJ) ou 9 (3 000kJ). Or, le fil<strong>et</strong> qui aété installé est de classe 6 (1 500 kJ).32
Coûts d’entr<strong>et</strong>ien de l’ouvrage (avec <strong>et</strong> sans forêt):La plus grande partie <strong>des</strong> coûts d’entr<strong>et</strong>ien de l’ouvrage sont <strong>des</strong> coûts fixes (surveillance <strong>et</strong>débroussaillage). Ainsi, dans le cas d’une comparaison avec-sans forêt où l’on maintien le mêmenombre d’ouvrages, ces coûts n’ont pas d’intérêt à être pris en compte dans le calcul. En revanche,ils devront être pris en compte dans les coûts d’entr<strong>et</strong>ien d’un ouvrage non maintenu.Les gains en coûts d’entr<strong>et</strong>ien permis par la forêt sont plus aléatoires <strong>et</strong> donc difficiles àestimer. Il s’agit :- <strong>du</strong> gain en <strong>du</strong>rée de vie de l’ouvrage : il serait possible d’estimer le gain sur la période de r<strong>et</strong>our<strong>du</strong> bloc d’énergie limite (qui dépasse la capacité <strong>du</strong> fil<strong>et</strong>). Mais c<strong>et</strong>te estimation serait biaisée parle fait qu’un éboulement constitué de plusieurs blocs ne dépassant pas la limite <strong>du</strong> fil<strong>et</strong> puissedépasser la limite <strong>du</strong> fil<strong>et</strong>.- <strong>du</strong> gain en pièces à changer : trop aléatoire pour être estimé, dépendant de certains endroitssensibles <strong>du</strong> fil<strong>et</strong>.- <strong>du</strong> gain en temps de délestage <strong>du</strong> fil<strong>et</strong> : un ordre de grandeur pourrait être estimé grâce au gainsur la période de r<strong>et</strong>our.Coûts d’implantation <strong>et</strong> d’entr<strong>et</strong>ien <strong>du</strong> scénario de gestion sylvicole :Pour le cas de Grignon, nous avons estimé le coût <strong>des</strong> opérations sylvicoles en se basant surles chiffres <strong>du</strong> martelage réalisé par l’ONF, qui a choisi de réaliser <strong>des</strong> interventions sylvicoles à unerotation de 30 ans. Ces interventions consistent en la réalisation de coupes de régénération partrouées de 10 à 15 ares, de coupes sanitaires <strong>et</strong> d’arbres menaçant en haut de falaise. Le but seraitde laisser certains arbres grossir pour obtenir les 30-40 cm proposés par Rockfor NET .Selon les coûts <strong>des</strong> travaux sylvicoles indiqués dans le GSM, il faudrait comptabiliser 2*30 HJpour 2*13 500 €, soit 60HJ pour 27 000 €.On est donc bien au-<strong>des</strong>sous <strong>des</strong> coûts de génie civil (98 680,77-27 000 = 71 680,77 euros degain) pour une protection par la forêt qui devrait être optimale d’ici 50 ans soit un ARP < 1% pourtous les transects.4.3. Coûts évitésLa méthode <strong>des</strong> coûts évités perm<strong>et</strong>, en considérant les dommages évités par une ré<strong>du</strong>ctionde l’aléa ou <strong>des</strong> enjeux, d’estimer les bénéfices apportés par la présence ou l’amélioration de laprotection assurée par la forêt.Il existe différents types de coûts pouvant être pris en compte : les coûts directs (dommagesaux biens physiques), coûts indirects (pertes in<strong>du</strong>ites par une baisse de pro<strong>du</strong>ctivité), coûtsintangibles (biens immatériels ne pouvant être réparés).Il faut donc, posséder une cartographie de la zone de propagation <strong>des</strong> aléas afin de pouvoirdéterminer les dommages possibles concernant les enjeux en cause.Dans notre cas nous avons utilisé les données issues <strong>des</strong> cartes résultant de la modélisationRF3D. Les coûts évités ont été calculés grâce à une application Excel développée en Suisse, <strong>et</strong> quiprend en compte les enjeux humains <strong>et</strong> matériels.Les paramètres d’entrée ont été récupérés pour une part lors de nos entr<strong>et</strong>iens d’enquêteréalisés auprès de la mairie, de la DDT, ou encore <strong>des</strong> agences immobilières. L’autre partie <strong>des</strong>paramètres provient <strong>des</strong> cartes de résultats de la simulation RF3D.33
Grâce aux cartes issues de la simulation RF3D, nous avons estimé pour chaque enjeu(bâtiment <strong>et</strong> route), la proportion menacée puis effectué un classement par risques (fort, moyen,faible) avec un intervalle de r<strong>et</strong>our pour chacune <strong>des</strong> trois classes de risque. L’intervalle de r<strong>et</strong>ournécessite une carte avec les cellules de départ <strong>et</strong> une carte avec le nombre de passages. Il à étécalculé comme suit :Intervalle de r<strong>et</strong>our = nombre de cellules de départ × 500 ÷ nombre de passages pour la cellule enjeuconsidéréeNB : le chiffre 500 correspond au nombre de départ simulé par cellule.RésultatsLe coût <strong>des</strong> dommages au risque initial correspond à la situation sans forêt, le coût <strong>des</strong>dommages au risque rési<strong>du</strong>el correspond à la situation avec forêt.- Coûts annuels de gestion de la forêt (30 ans, 2%): 855 €/an- Bénéfices annuels: 96 400 €- Rapport bénéfices/coûts: 112,7Compte tenu de ce résultat, avec un rapport bénéfices/coûts de 112,7, il est clair que lesinvestissements en opérations sylvicoles sont largement rentables d’un point de vue économique <strong>et</strong>sécurité. De plus, ces chiffres ont été minimisés car le coût <strong>des</strong> opérations sylvicoles perm<strong>et</strong>tra uneamélioration de la valeur de protection actuelle de la forêt <strong>et</strong> dans notre cas nous avons considéréces coûts de gestion seulement dans le cas d’un maintien <strong>du</strong> niveau actuel de protection de la forêtde Grignon.34
ConclusionDans le cadre de c<strong>et</strong>te étude, nous avons travaillé sur trois outils d’évaluation <strong>du</strong> niveau deprotection de la forêt face à l’aléa chute de pierre : IMA, RockFor NET <strong>et</strong> RockyFor3D. La comparaisoncoûts-avantages de ces métho<strong>des</strong> nous a permis de déterminer <strong>des</strong> domaines d’application àchacune d’entre elles : l’IMA s’avère efficace pour cartographier <strong>des</strong> zones prioritaires d’interventiondans le cas d’un peuplement situé sur un terrain homogène, mais il montre très rapidement sesfaiblesses sur terrain hétérogène. On lui préfèrera alors la méthode RFN, qui, pour un surcoûtminime, offre une possibilité réelle de comparaison de niveau d’aléas en bas de pente. Enfin, dans lecas où <strong>des</strong> mises en place d’ouvrages coûteux sont envisagées, on utilisera préférentiellement RF3Dpour bénéficier de la précision <strong>et</strong> de la diversité <strong>des</strong> informations en sortie de c<strong>et</strong>te méthode. Cesinformations, telles que l’énergie en bas de pente, la hauteur de passage ou le nombre de blocsdéposés font en eff<strong>et</strong> d’elle un très bon outil d’aide à la décision.Que ce soit par la méthode <strong>des</strong> coûts de substitution ou par celle <strong>des</strong> coûts évités, lesrésultats de l’évaluation économique <strong>du</strong> rôle de la forêt se passent de commentaires : une forêt avecun bon rôle de protection (ARP
BibliographieRapports de stageCahen, M., 2010. Ouvrages de parade contre les risques naturels en montagne <strong>et</strong> fonction deprotection de la forêt : analyse économique comparative. Rapport de stage AgroParisTech.PEYRAUD S., 2008, Mise en place d’un réseau international de chantiers pilote en forêt à rôle deprotection – Protocoles <strong>et</strong> exemple de réalisation (Morzine). Rapport de stage FIF-ENGREF.PublicationsDorren L.K.A., 2010. Rockyfor3D à coeur ouvert – Description complète <strong>du</strong> modèle 3D de chutes deblocs. Article d’ecorisQ, www.ecorisq.org: 21 p.Berger F., Dorren L.K.A., 2007. Principles of the tool Rockfor.n<strong>et</strong> for quantifying the rockfall hazardbelow a protection forest. Schweiz Z Forstwes 158 – 6, p: 157–165.Clou<strong>et</strong>, N., Berger, F., 2010. New gis developments in mountain protection forests - Zoning againstsnow avalanches and rockfalls.OuvragesCemagref, CRPF Rhône-Alpes, ONF, 2008. Guide <strong>des</strong> sylvicultures de montagne - Alpes <strong>du</strong> Nordfrançaises.Rapport d’étudeCemagref <strong>et</strong> ARPA, 2008. “Protection de la viabilité alpine,” rapport final, Proj<strong>et</strong> Interreg IIIa 2000 –2006 Alpes Latines n° 165 Provialp. 375 p.Bründl M., Krummenacher B., Rheinberger C., Winkler C., 2010. Formules de calcul <strong>du</strong> risque générépar les dangers naturelsBlanchart S., Dupire S., Miolane C. <strong>et</strong> Véron C., 2009. Évaluation économique <strong>du</strong> rôle de protection dela végétation, <strong>et</strong> <strong>des</strong> forêts de montagne en particulierMorgane Goud<strong>et</strong> M., Grisier C., Simon E., Gendreau T., 2007. Analyse <strong>des</strong> données LIDAR - Étude <strong>du</strong>rôle de protection de la forêt contre les chutes de pierres.Sites Intern<strong>et</strong>Site de l’association EcorisQ www.ecorisq.org37
ContactsSylvain DUPIRE, chargé de mission proj<strong>et</strong> InterregLEF – AgroParisTech, centre de NancyONF, Service RTM6 avenue de France, 74000 AnnecyTel. : 06.18.74.29.54sylvain.<strong>du</strong>pire@gmail.comFrédéric BERGER, chercheur chute de blocs, Cemagref de Grenoble2 Rue de la papèterie Saint Martin d’Héres 38402Tel : 04.76.76.28.00fred.berger@cemagref.frNicolas CLOUET, ingénieur d’étude, Cemagref de Grenoble2 Rue de la papèterie Saint Martin d’Héres 38402Tel : 06. 75.94.38.12nclou<strong>et</strong>@gmail.comOlivier LAMY, responsable chantier pilote 73Tel. : 04.79.64.01.74 ou 06.24.97.31.90olivier.lamy@onf.frOlivier FAYARD, Référent technique Chantier Pilote 74,6 avenue de France, 74000 Annecyolivier.fayard@onf.frTel. : 04.50.97.89.51 ou 06.21.47.14.5538
Annexes39
Annexe n°1 : cartographie <strong>des</strong> IMA par plac<strong>et</strong>tes40
Annexe n°2 : cartographie <strong>des</strong> IMA par transect41
Annexe n°3 : résultats bruts de Rockfor NETZone de départ de la plac<strong>et</strong>te n°1042
Zone de départ de la plac<strong>et</strong>te n°943
Zone de départ de la plac<strong>et</strong>te n°1644
Zone de départ de la plac<strong>et</strong>te n°745
Annexe n°4 : cartographie <strong>des</strong> résultats de RFN46
Annexe n°5 : tableau récapitulatif <strong>des</strong> rasters d’entrée de RF3DCouche <strong>des</strong>cription min max unité Type remarquesdem MNT 0 8850 mètres double idéalement issu <strong>du</strong> LIDARrockdensity masse volumique <strong>des</strong> blocs 0 3300 kg.m -3 entier définit les cellules sources; on prendra une densité de 2800d1 hauteur <strong>des</strong> blocs = épaisseur 0 100 mètres double définit les cellules sources; varié de +- 10% pour modèlesd2 largeur <strong>des</strong> blocs 0 100 mètres double définit les cellules sources; varié de +- 10% pour modèlesd3 longueur <strong>des</strong> blocs 0 100 mètres double définit les cellules sources; varié de +- 10% pour modèlesblshape forme <strong>du</strong> bloc 0 4 sans entier Si indéfini, le modèle prend un bloc ellipsoïdal ou sphériquerg70 rugosité dans 70% <strong>des</strong> cas 0 100 sans double correspond aux valeurs de MOH 70 mesurées sur le terrainrg20 rugosité dans 20% <strong>des</strong> cas 0 100 sans double correspond aux valeurs de MOH 20 mesurées sur le terrainrg10 rugosité dans 10% <strong>des</strong> cas 0 100 sans double correspond aux valeurs de MOH 10 mesurées sur le terrainsoiltype type de sol 0 6 sans entier type de surface/sous-sol en 6 catégoriesEn cas de simulation avec forêtnrtrees nb tige par ha par cellule 0 1000 sans entier densitédbhmean diamètre à 1m30 moyen 0 200 cm doubledbhstd écart standard de d1,3 - - cm doublestandnr numéro de peuplement 0 - sans entier type de peuplementconif_percent pourcentage de conifères 0 100 sans double valeur de 0 en cas de forêt formée uniquement de feuillus0
Annexe n°6 : Cartographie <strong>des</strong> fréquences depropagation0
Annexe n°7 : Zones protégées par la forêt, c’est-àdireoù la forêt perm<strong>et</strong> de diminuer les fréquences2